Note
Bonjour, bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez plus profondément dans l’univers du Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et obtenez des aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions et concours festifs : Participez à des concours et à des promotions spéciales pendant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Vision par ordinateur
Ce projet entre officiellement dans le domaine de la vision par ordinateur !
Exécuter le code
cd ~/picrawler/examples
sudo python3 display.py
Voir l’image
Après l’exécution du code, le terminal affichera l’invite suivante :
No desktop !
* Serving Flask app "vilib.vilib" (lazy loading)
* Environment: production
WARNING: Do not use the development server in a production environment.
Use a production WSGI server instead.
* Debug mode: off
* Running on http://0.0.0.0:9000/ (Press CTRL+C to quit)
Vous pouvez alors entrer http://<votre IP>:9000/mjpg dans le navigateur pour afficher l’écran vidéo. Par exemple : http://192.168.18.113:9000/mjpg
Après l’exécution du programme, vous verrez les informations suivantes à la fin :
Tapez une touche pour appeler la fonction !
q: Prendre une photo1: Détection de couleur : rouge2: Détection de couleur : orange3: Détection de couleur : jaune4: Détection de couleur : vert5: Détection de couleur : bleu6: Détection de couleur : violet0: Désactiver la détection de couleurr: Scanner le QR codef: Activer/Désactiver la détection faciales: Afficher les informations des objets détectés
Veuillez suivre les instructions pour activer les fonctions correspondantes.
Prendre une photo
Tapez
qdans le terminal. L’image actuellement vue par la caméra sera sauvegardée (si la fonction de détection de couleur est activée, le cadre sera également visible dans l’image enregistrée). Vous pouvez voir ces photos dans le répertoire~/Pictures/PiCrawler/de votre Raspberry Pi. Vous pouvez utiliser des outils comme FileZilla Software pour transférer les photos vers votre PC.Détection de couleur
En entrant un chiffre entre
1~6, l’une des couleurs suivantes sera détectée : « rouge, orange, jaune, vert, bleu, violet ». Entrez0pour désactiver la détection de couleur.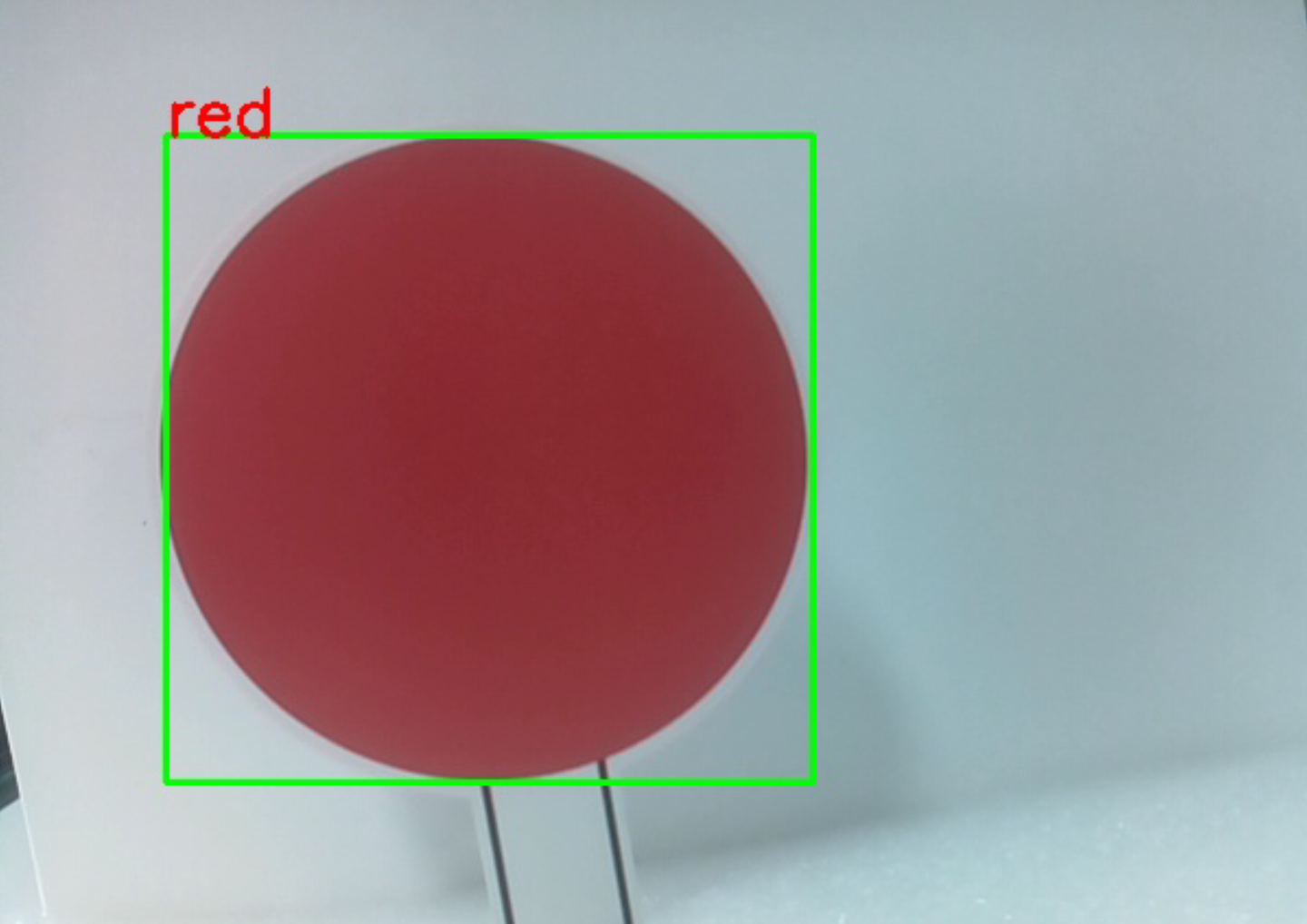
Note
Vous pouvez télécharger et imprimer les
Cartes de couleur PDFpour la détection de couleur.Détection faciale
Tapez
fpour activer la détection faciale.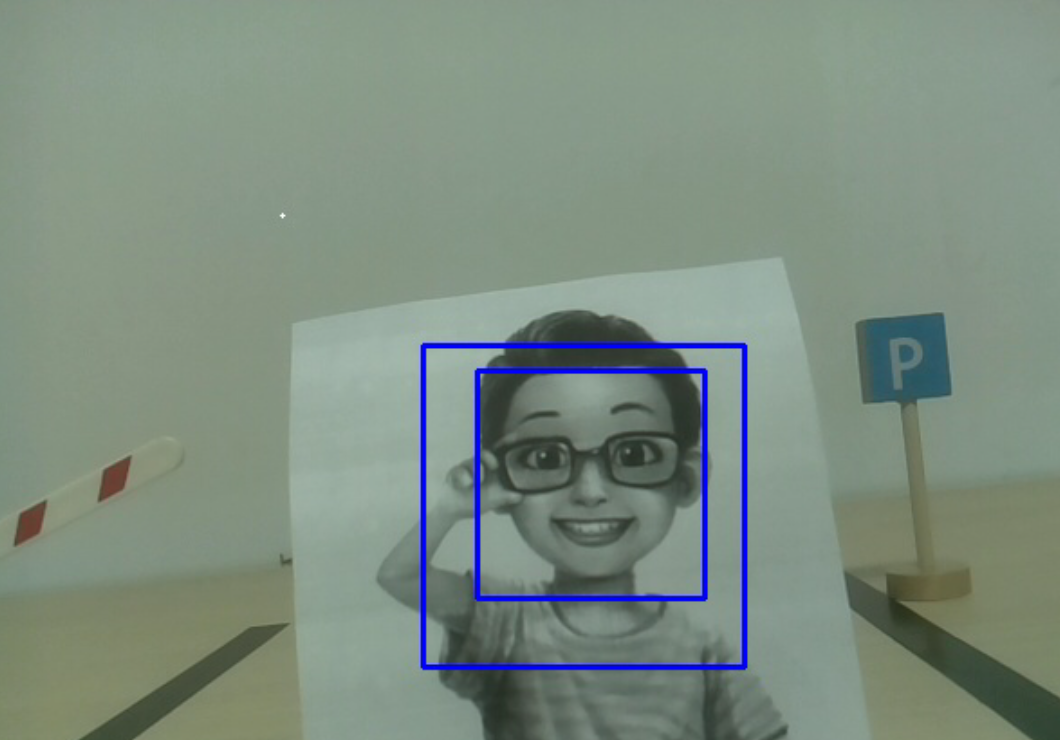
Détection de QR Code
Tapez
rpour activer la reconnaissance des QR codes. Aucune autre opération ne peut être effectuée tant que le QR code n’est pas reconnu. Les informations décodées du QR code seront affichées dans le terminal.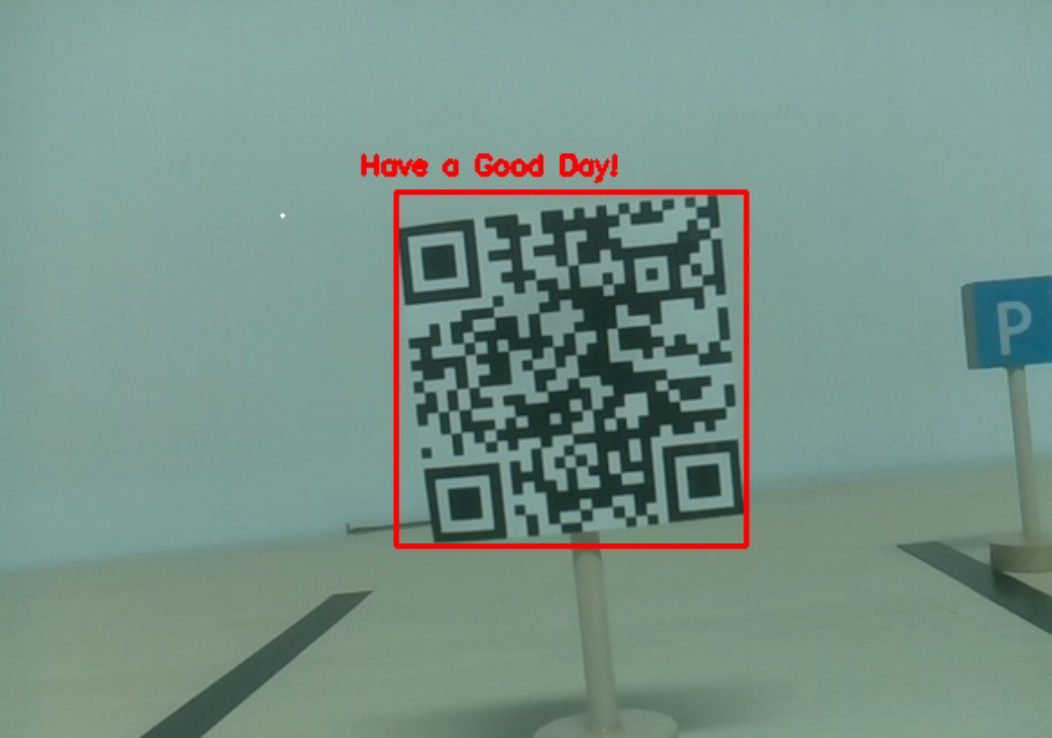
Afficher les informations
En entrant
s, les informations sur la détection faciale (et de couleur) seront affichées dans le terminal. Cela inclut les coordonnées du centre (X, Y) et la taille (Largeur, Hauteur) de l’objet mesuré.
Code
from vilib import Vilib
from time import sleep, time, strftime, localtime
import threading
import readchar
from os import getlogin
USERNAME = getlogin()
PICTURE_PATH = f"/home/{USERNAME}/Pictures/"
flag_face = False
flag_color = False
qr_code_flag = False
MANUAL = '''
Press a key to call the function:
q: Take photo
1: Color detect : red
2: Color detect : orange
3: Color detect : yellow
4: Color detect : green
5: Color detect : blue
6: Color detect : purple
0: Switch off Color detect
r: Scan the QR code (toggle)
f: Switch ON/OFF face detect
s: Display detected object information
Ctrl+C: Quit
'''
color_list = ['close', 'red', 'orange', 'yellow', 'green', 'blue', 'purple']
def face_detect(flag):
print("Face Detect:", flag)
Vilib.face_detect_switch(flag)
def qrcode_detect():
global qr_code_flag
Vilib.qrcode_detect_switch(True)
print("Waiting for QR code...")
text = None
while qr_code_flag:
temp = Vilib.detect_obj_parameter.get('qr_data', "None")
if temp != "None" and temp != text:
text = temp
print("QR code:", text)
sleep(0.2)
Vilib.qrcode_detect_switch(False)
def take_photo():
_time = strftime('%Y-%m-%d-%H-%M-%S', localtime(time()))
name = f'photo_{_time}'
Vilib.take_photo(name, PICTURE_PATH)
print(f'Photo saved as {PICTURE_PATH}{name}.jpg')
def object_show():
global flag_color, flag_face
if flag_color:
if Vilib.detect_obj_parameter.get('color_n', 0) == 0:
print('Color Detect: None')
else:
x = Vilib.detect_obj_parameter.get('color_x')
y = Vilib.detect_obj_parameter.get('color_y')
w = Vilib.detect_obj_parameter.get('color_w')
h = Vilib.detect_obj_parameter.get('color_h')
print("[Color Detect] Coordinate:", (x, y), "Size:", (w, h))
if flag_face:
if Vilib.detect_obj_parameter.get('human_n', 0) == 0:
print('Face Detect: None')
else:
x = Vilib.detect_obj_parameter.get('human_x')
y = Vilib.detect_obj_parameter.get('human_y')
w = Vilib.detect_obj_parameter.get('human_w')
h = Vilib.detect_obj_parameter.get('human_h')
print("[Face Detect] Coordinate:", (x, y), "Size:", (w, h))
def main():
global flag_face, flag_color, qr_code_flag
qrcode_thread = None
Vilib.camera_start(vflip=False, hflip=False)
Vilib.display(local=True, web=True)
print(MANUAL)
try:
while True:
key = readchar.readkey().lower()
if key == 'q':
take_photo()
elif key in '0123456':
index = int(key)
if index == 0:
flag_color = False
Vilib.color_detect('close')
else:
flag_color = True
Vilib.color_detect(color_list[index])
print('Color detect:', color_list[index])
elif key == 'f':
flag_face = not flag_face
face_detect(flag_face)
elif key == 'r':
qr_code_flag = not qr_code_flag
if qr_code_flag:
if qrcode_thread is None or not qrcode_thread.is_alive():
qrcode_thread = threading.Thread(target=qrcode_detect, daemon=True)
qrcode_thread.start()
else:
print('QRcode Detect: close')
elif key == 's':
object_show()
sleep(0.05)
except KeyboardInterrupt:
print("\nQuit.")
finally:
# Stop QR thread and switches
qr_code_flag = False
try:
Vilib.qrcode_detect_switch(False)
except Exception:
pass
try:
Vilib.color_detect('close')
except Exception:
pass
try:
Vilib.face_detect_switch(False)
except Exception:
pass
# Close camera
try:
Vilib.camera_close()
except Exception:
pass
if __name__ == "__main__":
main()
Comment ça fonctionne ?
La première chose à noter ici est la fonction suivante. Ces deux fonctions vous permettent de démarrer la caméra.
Vilib.camera_start()
Vilib.display()
Fonctions liées à la « détection d’objets » :
Vilib.face_detect_switch(True): Activer/Désactiver la détection facialeVilib.color_detect(color): Pour la détection de couleur, une seule couleur peut être détectée à la fois. Les paramètres à entrer sont :"rouge","orange","jaune","vert","bleu","violet"Vilib.color_detect_switch(False): Désactiver la détection de couleurVilib.qrcode_detect_switch(False): Activer/Désactiver la détection de QR code, renvoie les données décodées du QR code.Vilib.gesture_detect_switch(False): Activer/Désactiver la détection de gestesVilib.traffic_sign_detect_switch(False): Activer/Désactiver la détection de panneaux de signalisation
Les informations détectées par l’objet seront stockées dans le dictionnaire detect_obj_parameter = Manager().dict().
Dans le programme principal, vous pouvez y accéder comme ceci :
Vilib.detect_obj_parameter['color_x']
Les clés du dictionnaire et leur utilisation sont les suivantes :
color_x: la valeur x de la coordonnée du centre du bloc de couleur détecté, la plage est de 0 à 320color_y: la valeur y de la coordonnée du centre du bloc de couleur détecté, la plage est de 0 à 240color_w: la largeur du bloc de couleur détecté, la plage est de 0 à 320color_h: la hauteur du bloc de couleur détecté, la plage est de 0 à 240color_n: le nombre de zones de couleur détectéeshuman_x: la valeur x de la coordonnée du centre du visage humain détecté, la plage est de 0 à 320human_y: la valeur y de la coordonnée du centre du visage détecté, la plage est de 0 à 240human_w: la largeur du visage humain détecté, la plage est de 0 à 320human_h: la hauteur du visage humain détecté, la plage est de 0 à 240human_n: le nombre de visages détectéstraffic_sign_x: la valeur x de la coordonnée centrale du panneau de signalisation détecté, la plage est de 0 à 320traffic_sign_y: la valeur y de la coordonnée centrale du panneau de signalisation détecté, la plage est de 0 à 240traffic_sign_w: la largeur du panneau de signalisation détecté, la plage est de 0 à 320traffic_sign_h: la hauteur du panneau de signalisation détecté, la plage est de 0 à 240traffic_sign_t: le contenu du panneau de signalisation détecté, la liste des valeurs est [“stop”,”right”,”left”,”forward”]gesture_x: la valeur x de la coordonnée centrale du geste détecté, la plage est de 0 à 320gesture_y: la valeur y de la coordonnée centrale du geste détecté, la plage est de 0 à 240gesture_w: la largeur du geste détecté, la plage est de 0 à 320gesture_h: la hauteur du geste détecté, la plage est de 0 à 240gesture_t: le contenu du geste détecté, la liste des valeurs est [« paper », »scissor », »rock »]qr_data: le contenu du QR code détectéqr_x: la valeur x de la coordonnée centrale du QR code détecté, la plage est de 0 à 320qr_y: la valeur y de la coordonnée centrale du QR code détecté, la plage est de 0 à 240qr_w: la largeur du QR code détecté, la plage est de 0 à 320qr_h: la hauteur du QR code détecté, la plage est de 0 à 320