Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Adéntrate más en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros apasionados.
¿Por qué unirte?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales durante las festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
Giro
Ya sabemos cómo hacer que PiCrawler asuma una postura específica; el siguiente paso es combinar las posturas para formar una acción continua.
Aquí, las cuatro patas de PiCrawler se mueven arriba y abajo en pares, saltando al ritmo de la música.
Programa
Nota
Puedes escribir el programa según la siguiente imagen, consulta el tutorial: How to Create a New Project?.
O encuentra el código con el mismo nombre en la página de Ejemplos de EzBlock Studio y haz clic en Ejecutar o Editar directamente.

¿Cómo funciona?
Utiliza dos capas de bucles for para que la matriz new_step produzca cambios continuos y regulares, y al mismo tiempo, do step ejecuta las posturas para formar una acción continua.
Puedes obtener intuitivamente la matriz de valores de coordenadas correspondiente a cada postura desde Ajustar Postura.
Un aspecto que necesitas tener en cuenta es este bloque de matriz de coordenadas:
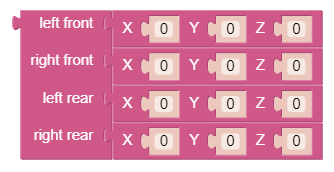
Es esencialmente una matriz bidimensional, que se puede procesar mediante bloques en la categoría Lista. Su estructura es [[frontal derecha],[frontal izquierda],[trasera izquierda],[trasera derecha]].
En otras palabras, en este ejemplo, new_step#1 corresponde a la pata frontal derecha; new_step#2 corresponde a la pata frontal izquierda; new_step#3 corresponde a la pata trasera izquierda; y new_step#4 corresponde a la pata trasera derecha.