Nota
Hola, bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook. ¡Explora más a fondo Raspberry Pi, Arduino y ESP32 con otros entusiastas!
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y vistas previas.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
Guía rápida sobre EzBlock
Nota
Si estás usando una Raspberry Pi 5, nuestro software de programación gráfica, EzBlock, no es compatible.
El rango de ángulo del servo es de -90° a 90°, pero el ángulo configurado en fábrica es aleatorio, podría ser 0°, 45° u otro valor; si ensamblamos el robot directamente con este ángulo, podría llevar a un estado caótico al ejecutar el código, o peor aún, podría causar que el servo se bloquee y se queme.
Por lo tanto, necesitamos configurar todos los ángulos del servo en 0° antes de instalarlos, de manera que el ángulo del servo quede en el centro, sin importar hacia qué dirección gire.
Primero, sigue el tutorial Install EzBlock OS (tutorial propio de EzBlock) para instalar EzBlock en una tarjeta Micro SD. Una vez completada la instalación, insértala en la Raspberry Pi.
Nota
Después de completar la instalación, regresa a esta página.
Para asegurarte de que el servo está correctamente configurado en 0°, primero inserta el brazo del servo en el eje del servo y luego gira suavemente el brazo a un ángulo diferente. Esto te permitirá observar claramente el movimiento del servo.

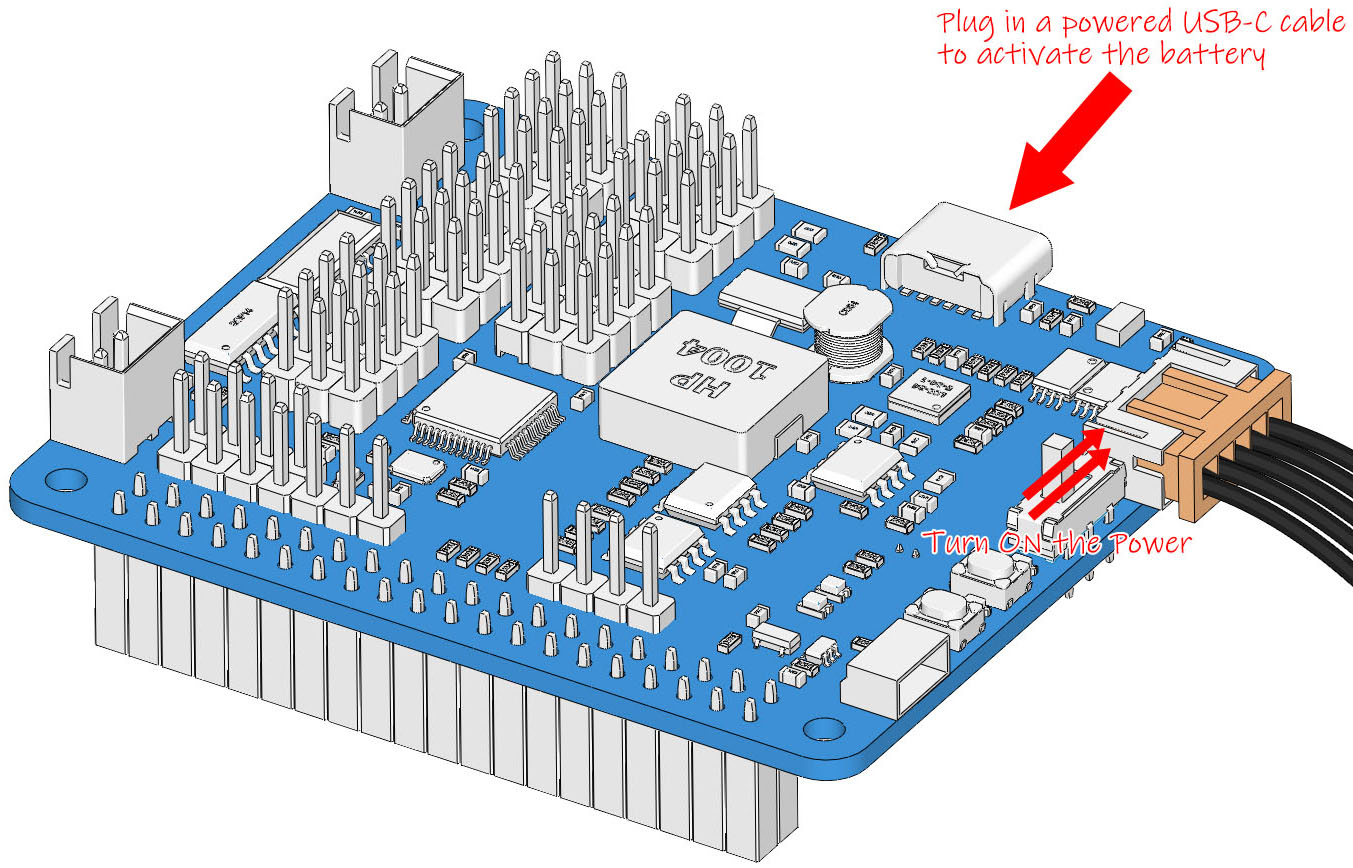
Sigue las instrucciones en el manual de ensamblaje, inserta el cable de la batería y enciende el interruptor de encendido. Luego conecta un cable USB-C alimentado para activar la batería. Espera de 1 a 2 minutos hasta que escuches un sonido indicando que la Raspberry Pi ha arrancado correctamente.
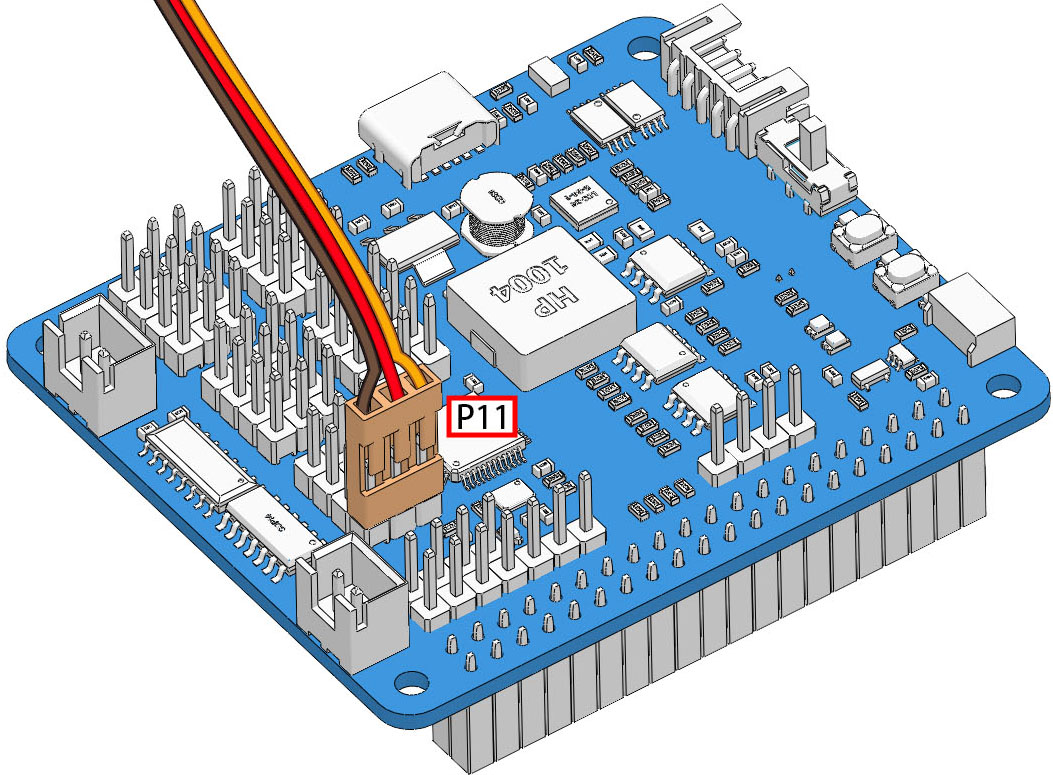
A continuación, conecta el cable del servo al puerto P11 como se muestra.
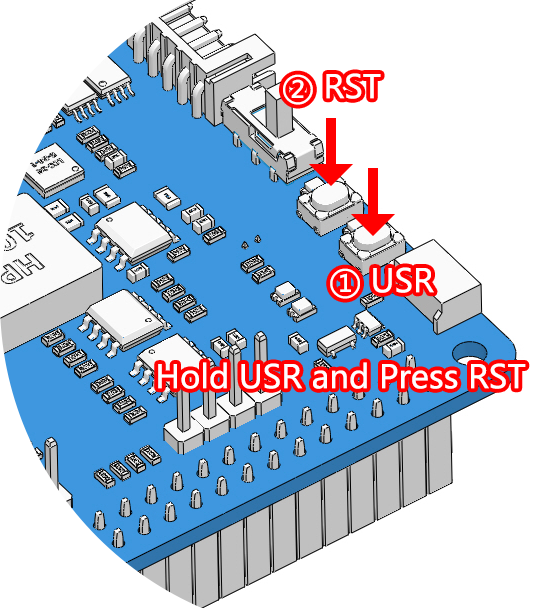
Mantén presionada la tecla USR, luego presiona la tecla RST para ejecutar el script de cero de servos en el sistema. Cuando veas que el brazo del servo gira hacia una posición (esta es la posición 0°, que podría no ser vertical o paralela), indica que el programa se ha ejecutado.
Nota
Este paso solo necesita realizarse una vez; después, simplemente conecta otros cables de servo y se ajustarán automáticamente a cero.
Ahora, retira el brazo del servo, asegurándote de que el cable del servo permanezca conectado, y no apagues la energía. Luego continúa el ensamblaje siguiendo las instrucciones del manual.
Nota
No desconectes este cable del servo antes de fijarlo con el tornillo, puedes desconectarlo después de fijarlo.
No gires el servo mientras está encendido para evitar daños; si el eje del servo no está insertado en el ángulo correcto, retira el servo y vuelve a insertarlo.
Antes de ensamblar cada servo, necesitas conectar el cable del servo al puerto P11 y encender la energía para configurar su ángulo a 0°.
Esta función de ajuste a cero se desactivará si descargas un programa al robot más adelante con la aplicación EzBlock.