Nota
Hola, bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Adéntrate más en Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirte?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
Evitación de obstáculos
En este proyecto, PiCrawler usará un módulo ultrasónico para detectar obstáculos al frente. Cuando PiCrawler detecte un obstáculo, enviará una señal y buscará otra dirección para avanzar.
Programa
Nota
Puedes escribir el programa según la siguiente imagen. Consulta el tutorial: How to Create a New Project?.
O encuentra el código con el mismo nombre en la página de Ejemplos de EzBlock Studio y haz clic en Ejecutar o Editar directamente.
¿Cómo funciona?
Puedes encontrar los siguientes bloques en la categoría Módulo para lograr la detección de distancia:
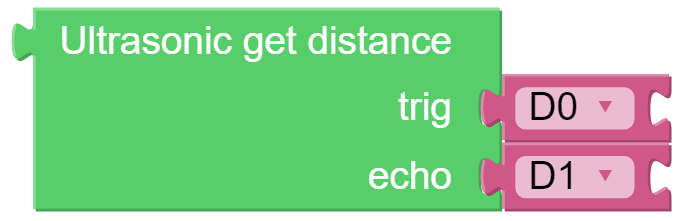
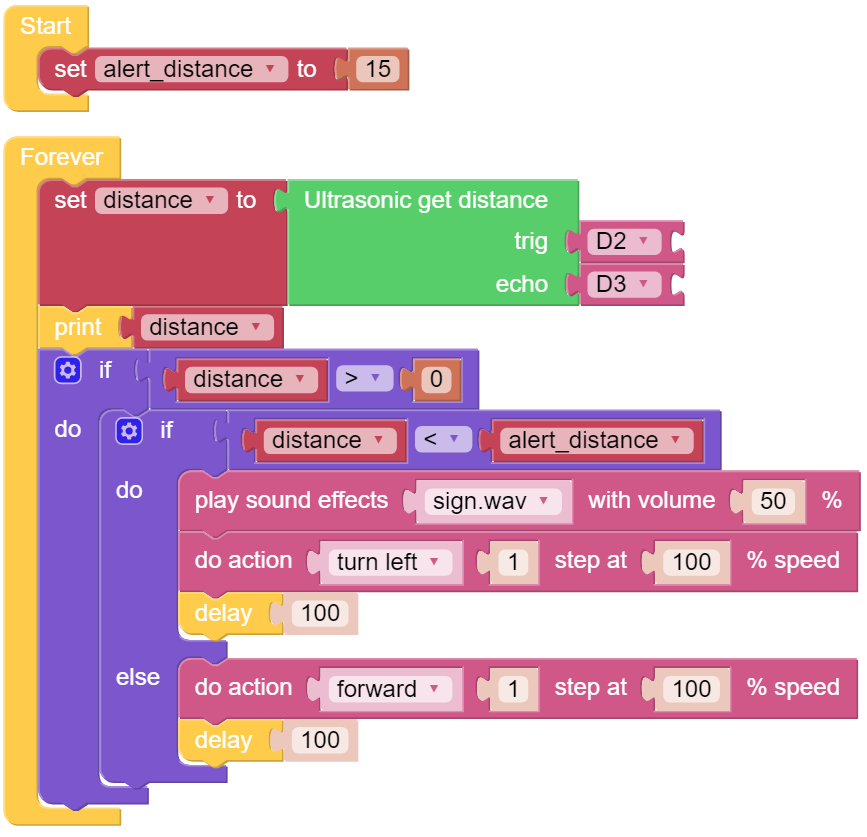
Es importante destacar que los dos pines del bloque deben corresponder al cableado real, es decir, trig-D2, echo-D3.
Aquí está el programa principal:
Lee la
distanciadetectada por el módulo ultrasónico y filtra los valores menores que 0 (cuando el módulo ultrasónico está demasiado lejos del obstáculo o no puede leer los datos correctamente, aparecerádistance<0).Cuando la
distanciaes menor quealert_distance(el valor umbral establecido previamente, que es 10), reproduce el efecto de sonidosign.wav. PiCrawler realiza ungiro a la izquierda.Cuando la
distanciaes mayor quealert_distance, PiCrawler avanzará haciaadelante.