Nota
Hola, bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Adéntrate más en Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirte?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
Calibrar el PiCrawler
Después de conectar el PiCrawler, habrá un paso de calibración. Esto se debe a posibles desviaciones durante el proceso de instalación o limitaciones de los servomotores, lo que hace que algunos ángulos estén ligeramente inclinados. Por lo tanto, puedes calibrarlos en este paso.
Sin embargo, si crees que el ensamblaje es perfecto y no se necesita calibración, también puedes omitir este paso.
Nota
Si deseas recalibrar el robot durante su uso, sigue los pasos a continuación.
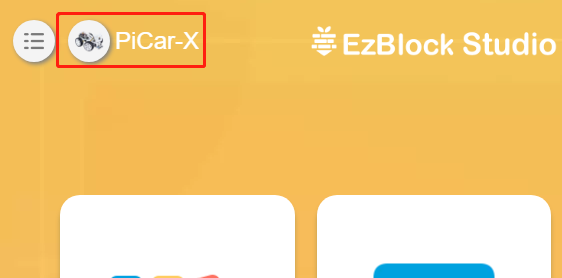
Puedes abrir la página de detalles del producto haciendo clic en el icono de conexión en la esquina superior izquierda.
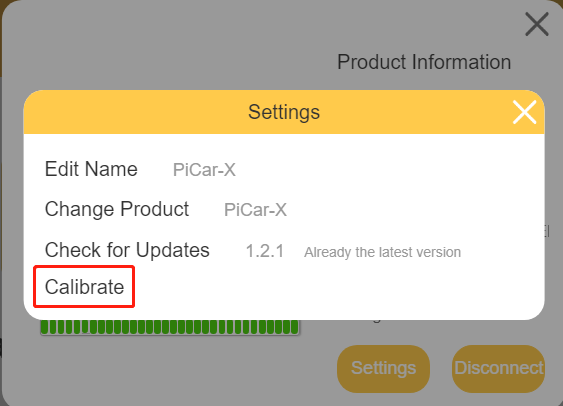
Haz clic en el botón Configuración.

En esta página, puedes cambiar el nombre del producto, el tipo de producto, ver la versión de la aplicación o calibrar el robot. Una vez que hagas clic en Calibrar, accederás a la página de calibración.
Los pasos de calibración son los siguientes:
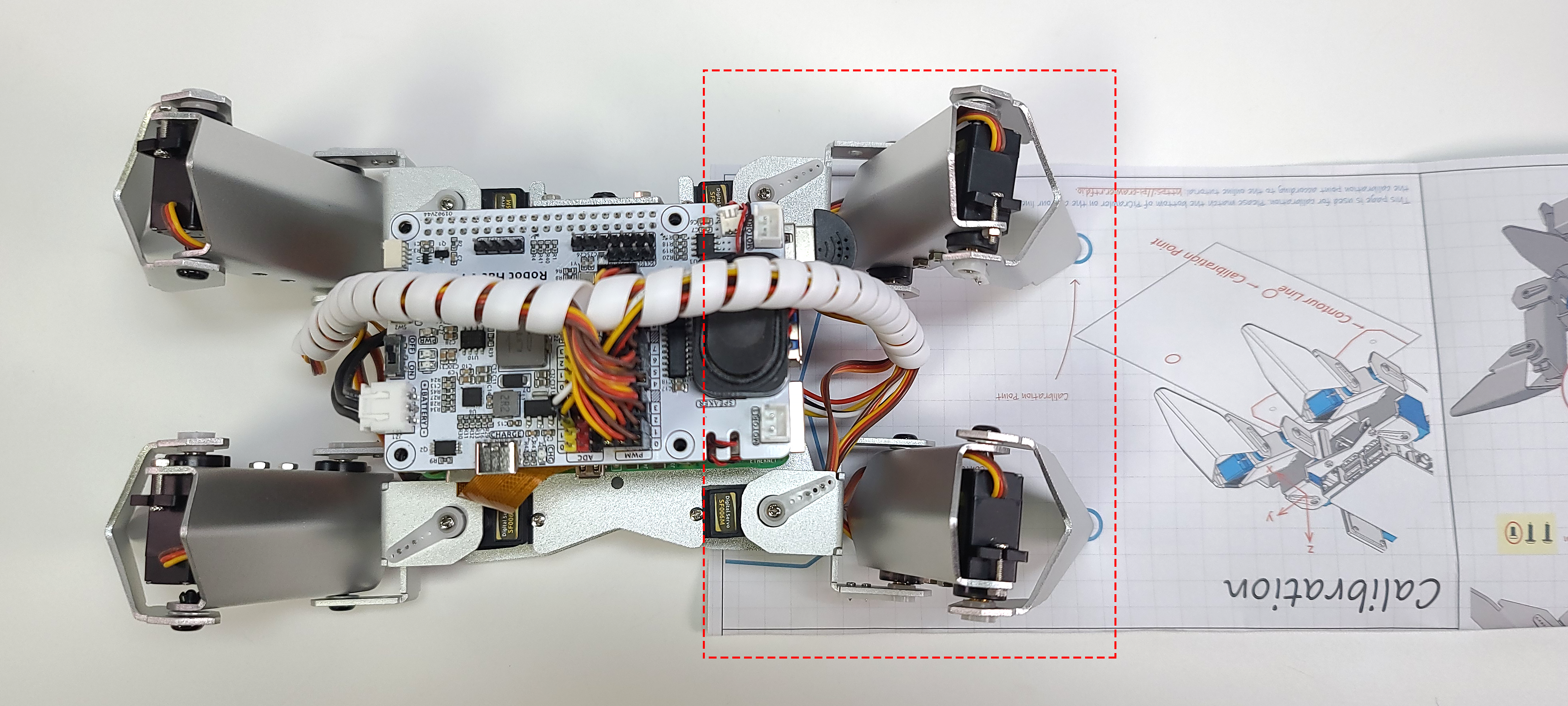
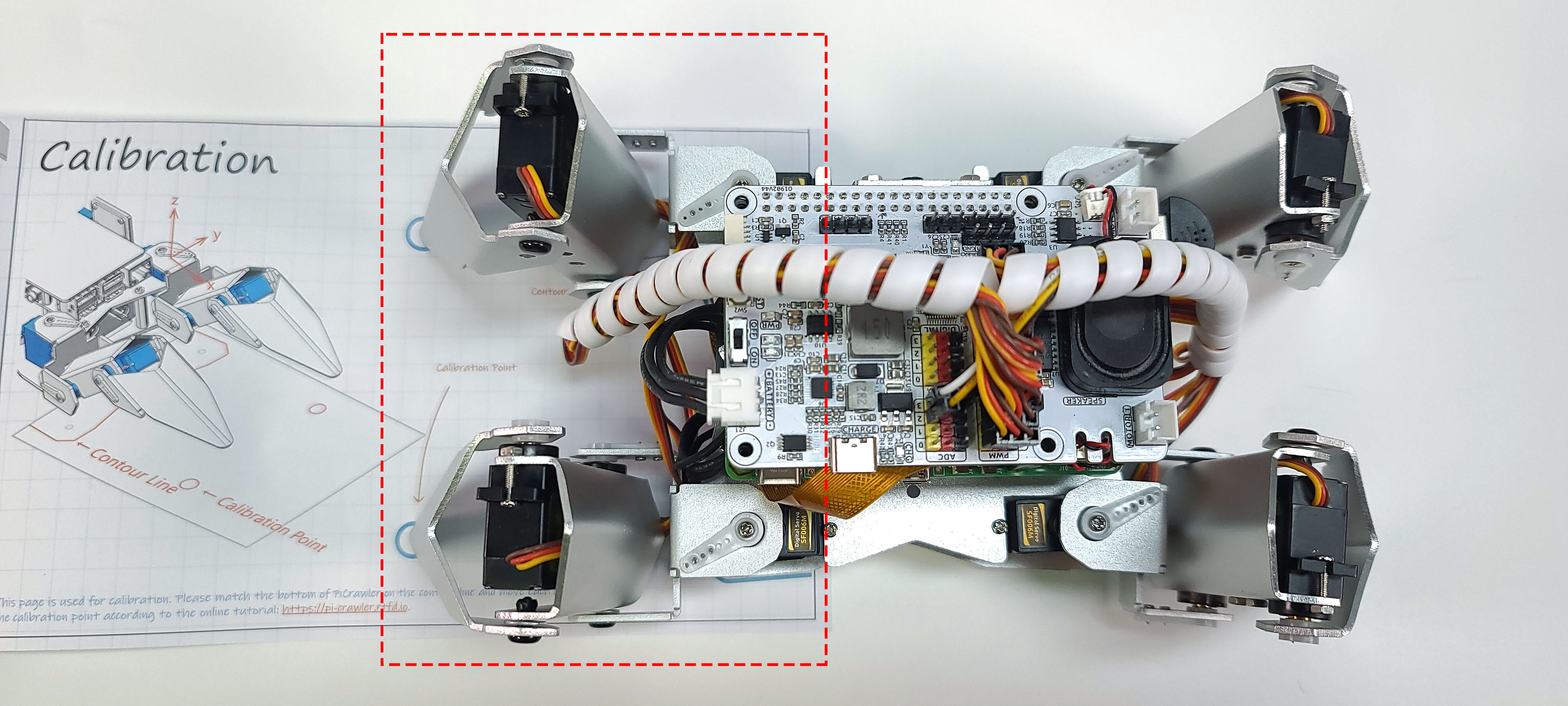
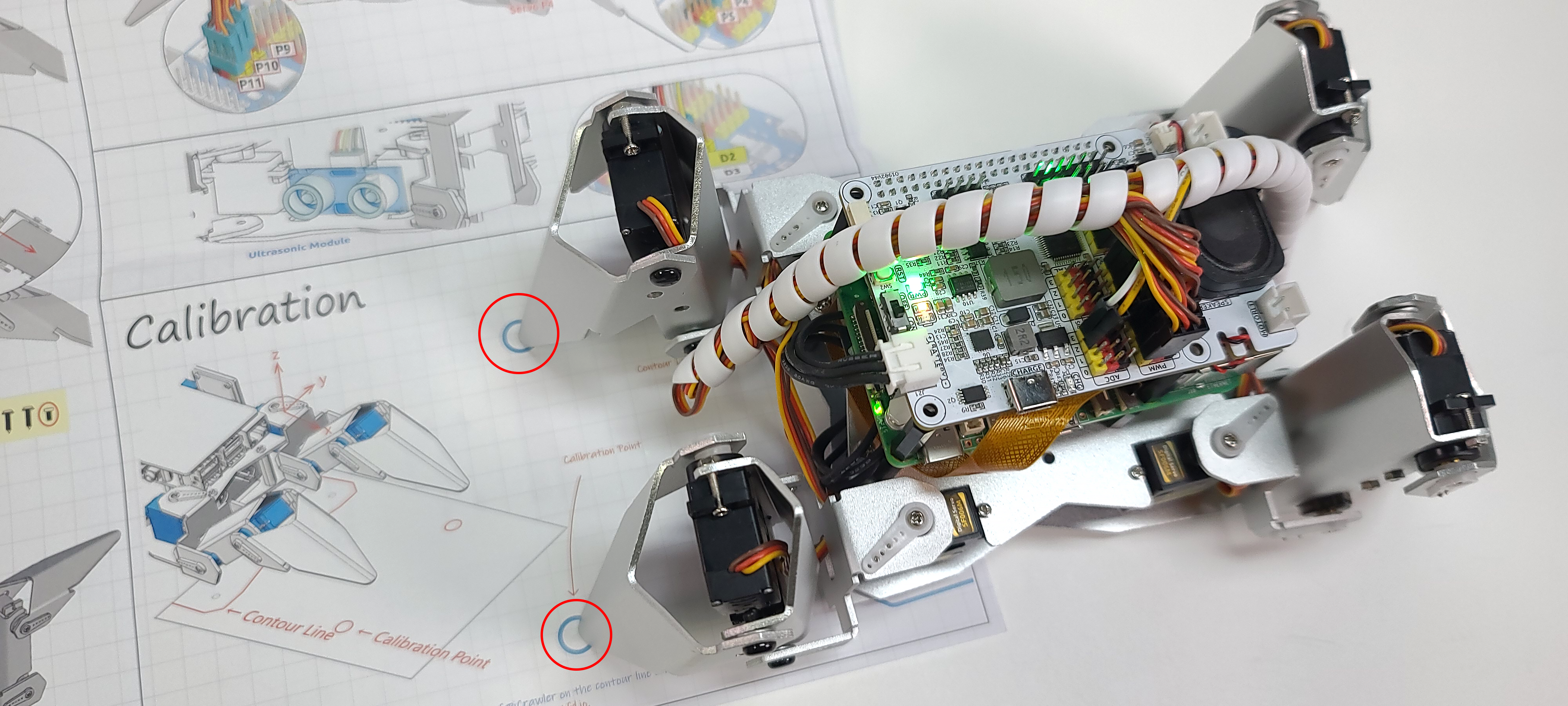
Toma el folleto de ensamblaje, gíralo a la última página y colócalo plano sobre la mesa. Luego, coloca el PiCrawler como se muestra a continuación, alineando su parte inferior con el contorno del gráfico de calibración.
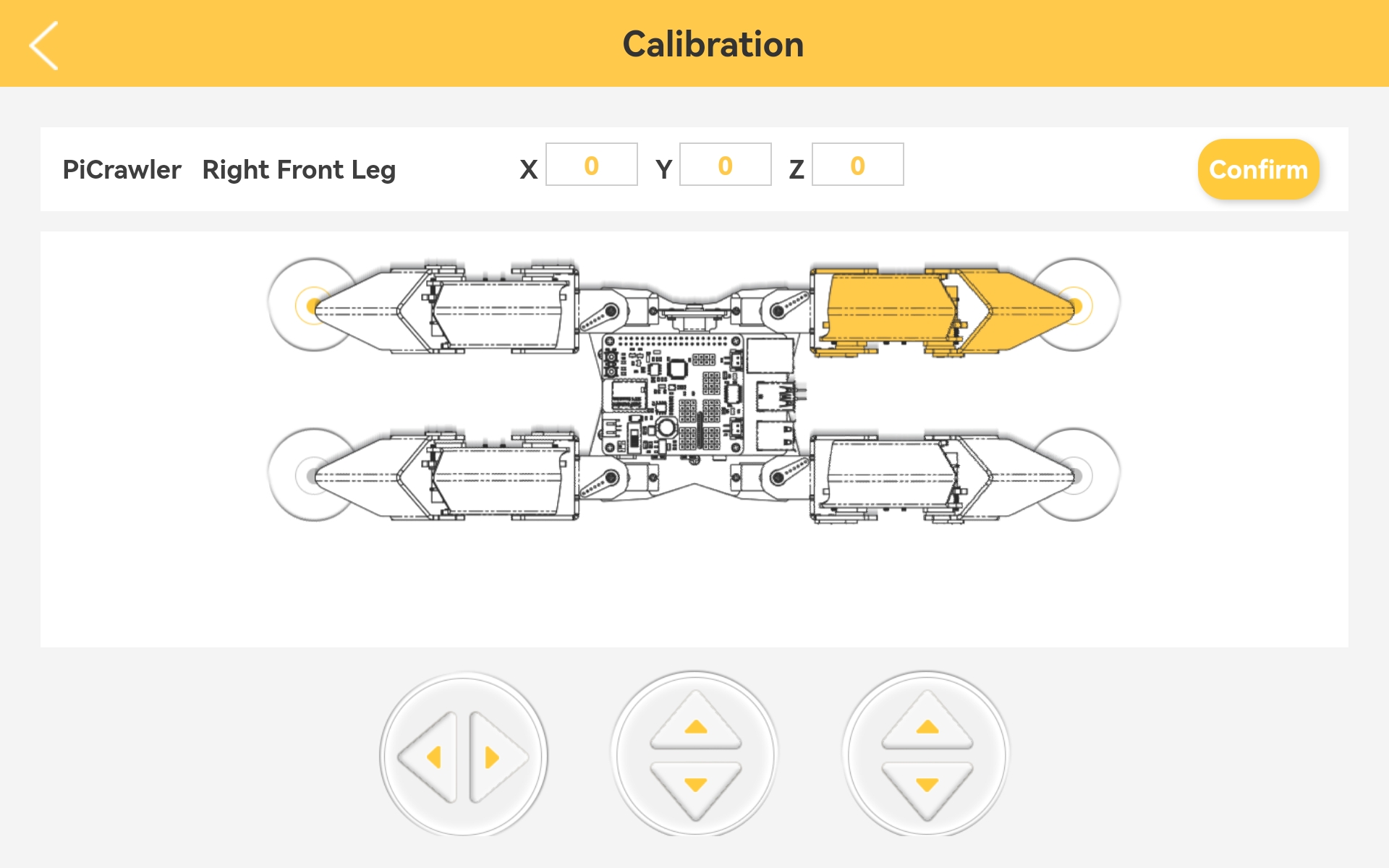
Vuelve a EzBlock Studio, selecciona una pata izquierda, luego haz clic en los 3 botones de los ejes X, Y y Z, y deja que las patas se alineen lentamente con el punto de calibración.
Los botones de calibración se usan para ajustes finos y es necesario presionarlos varias veces para observar el cambio de posición del pin.
Se recomienda hacer clic primero en el botón de subida del eje Z para levantar la pata, y luego ajustar los ejes X e Y.
Alinea la otra pata izquierda de la misma manera.
Después de calibrar las dos patas izquierdas, cambia el papel de calibración al lado derecho y calibra las dos patas derechas siguiendo el método anterior.