注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
1.3.3 ステッパーモーター
はじめに
ステッパーモーターは、その独自の設計により、フィードバックメカニズムなしで高い精度で制御できます。ステッパーモーターのシャフトは、一連の磁石で取り付けられ、正および負に充電される一連の電磁コイルによって制御され、特定の順序で正確に前方または後方に小さな「ステップ」で移動します。
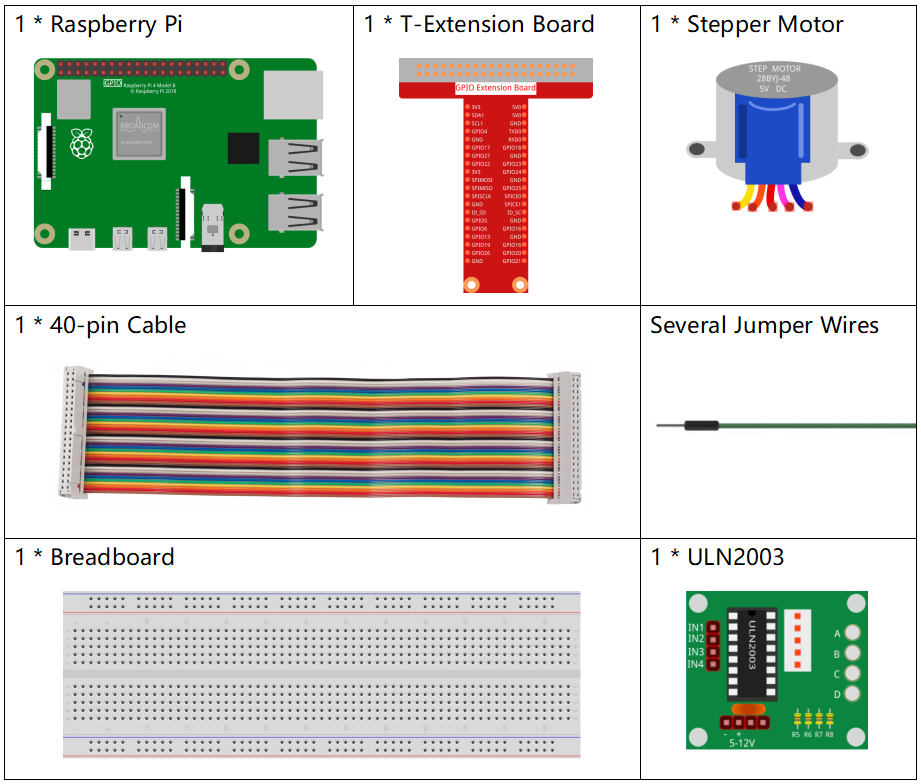
必要な部品
このプロジェクトでは、次の部品が必要です。
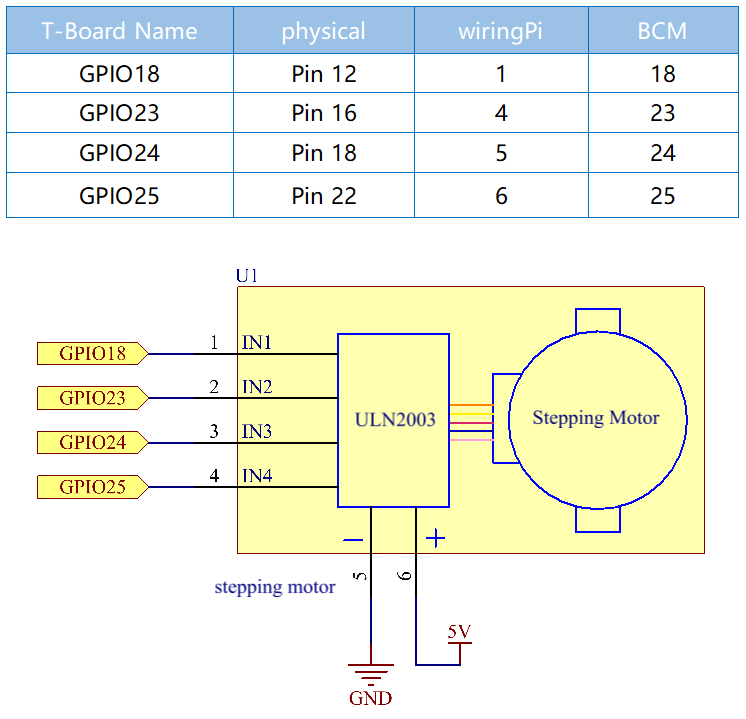
回路図
実験手順
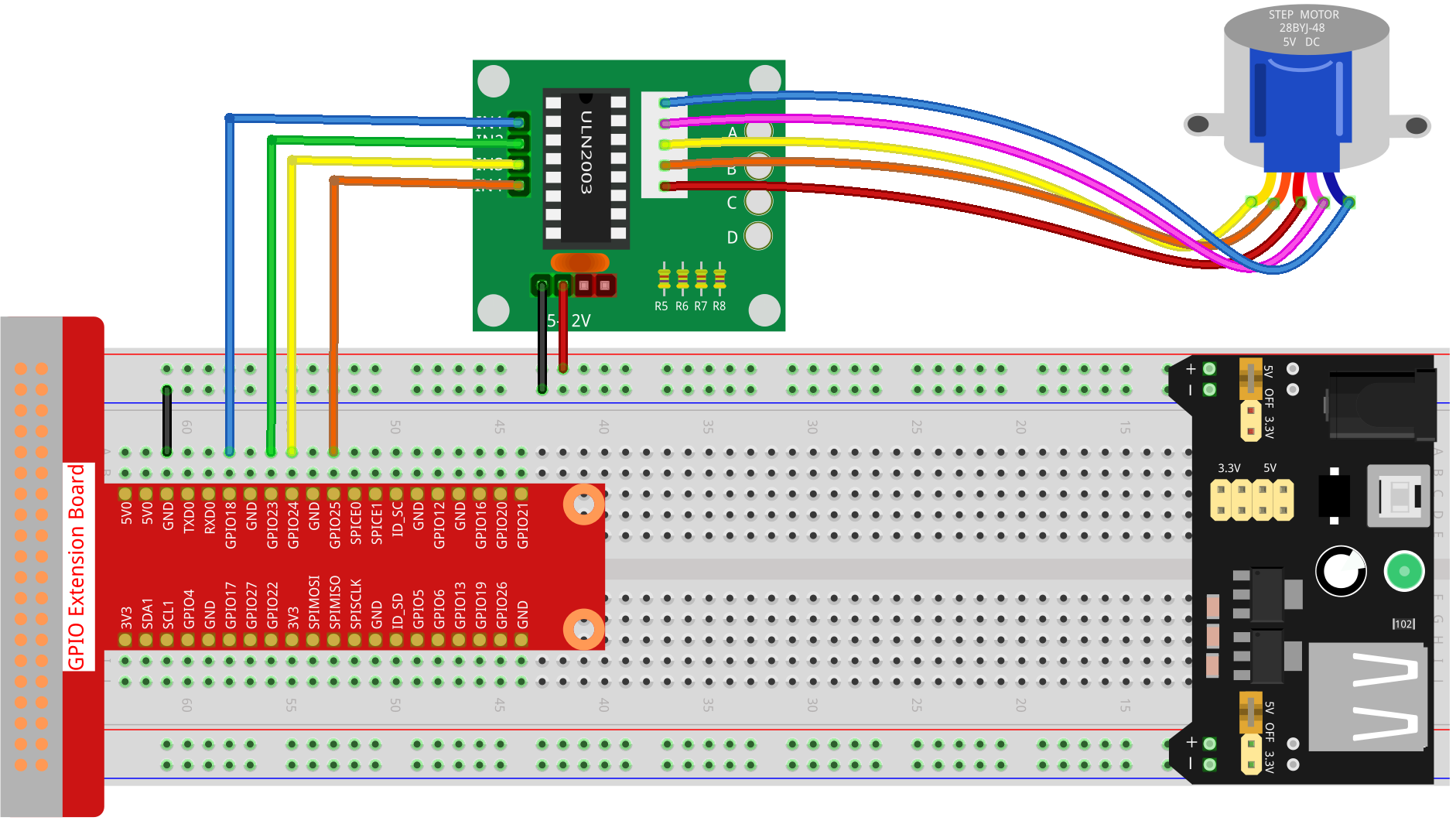
ステップ1: 回路を組み立てます。
ステップ2: コードファイルを開きます。
cd ~/davinci-kit-for-raspberry-pi/python-pi5
ステップ3: 実行します。
sudo python3 1.3.3_StepperMotor.py
コードが実行されると、ステッパーモーターは、 'a' または 'c' の入力に応じて時計回りまたは反時計回りに回転します。
警告
エラー メッセージ RuntimeError: Cannot determine SOC peripheral base address が表示された場合は、 「gpiozero」が動作しない場合。 を参照してください。
コード
注釈
以下のコードを変更、リセット、コピー、実行、停止することができます。ただし、それを行う前に、ソースコードのパスである davinci-kit-for-raspberry-pi/python-pi5 に移動する必要があります。コードを変更した後、その効果を確認するために直接実行できます。
#!/usr/bin/env python3
from gpiozero import OutputDevice
from time import sleep
# ステッパーモーターを制御するためにGPIOピン18、23、24、25を初期化します
motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
# モーターの回転速度パラメーターを設定し、スムーズなモーター動作のための各ステップ間の待ち時間を計算します
rotationPerMinute = 15
stepsPerRevolution = 2048
stepSpeed = (60 / rotationPerMinute) / stepsPerRevolution
def rotary(direction):
"""
指定された方向に基づいてモーターの回転を制御します。
:param direction: 時計回りの場合は 'c'、反時計回りの場合は 'a'
"""
if direction == 'c':
# 時計回りの回転のステップシーケンスを実行します
for j in range(4):
for i in range(4):
if 0x99 << j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
sleep(stepSpeed)
elif direction == 'a':
# 反時計回りの回転のステップシーケンスを実行します
for j in range(4):
for i in range(4):
if 0x99 >> j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
sleep(stepSpeed)
def loop():
"""
ユーザーにモーターの回転方向を選択させ続け、この入力に基づいてモーターを制御します。
"""
while True:
direction = input('モーターの回転方向を選択してください a=反時計回り、c=時計回り: ')
if direction == 'c':
print('モーターは時計回りに動作します\n')
break
elif direction == 'a':
print('モーターは反時計回りに動作します\n')
break
else:
print('入力エラー、もう一度やり直してください!')
# 選択した方向でモーターを連続的に回転させます
while True:
rotary(direction)
def destroy():
"""
安全にすべてのモーターピンをオフにし、クリーンなシャットダウンに使用します。
"""
for pin in motorPin:
pin.off()
# メインプログラムの実行
try:
loop()
except KeyboardInterrupt:
destroy() # キーボード割り込みを処理してモーターを安全にシャットダウン
コードの説明
このセクションでは、必要なライブラリをインポートしています。GPIOピンの制御には「gpiozero」、タイミング制御には「time」を使用しています。
#!/usr/bin/env python3 from gpiozero import OutputDevice from time import sleep
ステッパーモータを制御するためにGPIOピン18、23、24、25を初期化します。
# ステッパーモータのモーターピンを初期化します motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
モーターの回転速度を設定し、スムーズな動作のために各ステップ間の時間間隔を計算します。
# モーターの回転速度パラメータを設定します rotationPerMinute = 15 stepsPerRevolution = 2048 # スムーズなモーター動作のための各ステップの間隔を計算します stepSpeed = (60 / rotationPerMinute) / stepsPerRevolution
「rotary」関数は、モーターの回転を制御します。ビット操作とステッピングシーケンスを使用して、時計回りまたは反時計回りの回転に適した順序でモーターピンをアクティブにします。
def rotary(direction): """ 指定された方向に基づいてモーターの回転を制御します。 :param direction: 'c' は時計回り、'a' は反時計回り """ if direction == 'c': # 時計回りの回転用のステッピングシーケンスを実行します for j in range(4): for i in range(4): if 0x99 << j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() sleep(stepSpeed) elif direction == 'a': # 反時計回りの回転用のステッピングシーケンスを実行します for j in range(4): for i in range(4): if 0x99 >> j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() sleep(stepSpeed)
「loop」関数はユーザーにモーターの回転方向を選択するように継続的にプロンプトを表示し、入力に基づいてモーターを制御します。
def loop(): """ ユーザーにモーターの回転方向を選択するように継続的にプロンプトを表示し、この入力に基づいてモーターを制御します。 """ while True: direction = input('モーターの方向を選択してください。a=反時計回り、c=時計回り:') if direction == 'c': print('モーターが時計回りに動作中\n') break elif direction == 'a': print('モーターが反時計回りに動作中\n') break else: print('入力エラー、もう一度やり直してください!') # 選択した方向にモーターを継続的に回転させます while True: rotary(direction)
「destroy」関数はすべてのモーターピンをオフにします。これはクリーンなシャットダウンのために使用され、プログラムが終了したときにモーターが安全に停止することを保証します。
def destroy(): """ クリーンなシャットダウンに使用される、すべてのモーターピンを安全にオフにします。 """ for pin in motorPin: pin.off()
メインプログラムは「loop」を呼び出し、キーボード割り込み(Ctrl+Cなど)を処理して「destroy」を使用してモーターを安全にシャットダウンします。
# メインプログラムの実行 try: loop() except KeyboardInterrupt: destroy() # キーボード割り込みを処理してモーターを安全にシャットダウンします