注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
1.3.1 モーター
はじめに
このプロジェクトでは、L293Dを使用してDCモーターを制御し、時計回りと反時計回りに回転させる方法を学びます。 DCモーターはより大きな電流が必要ですので、安全のためにここでは電源供給モジュールを使用してモーターに電力を供給します。
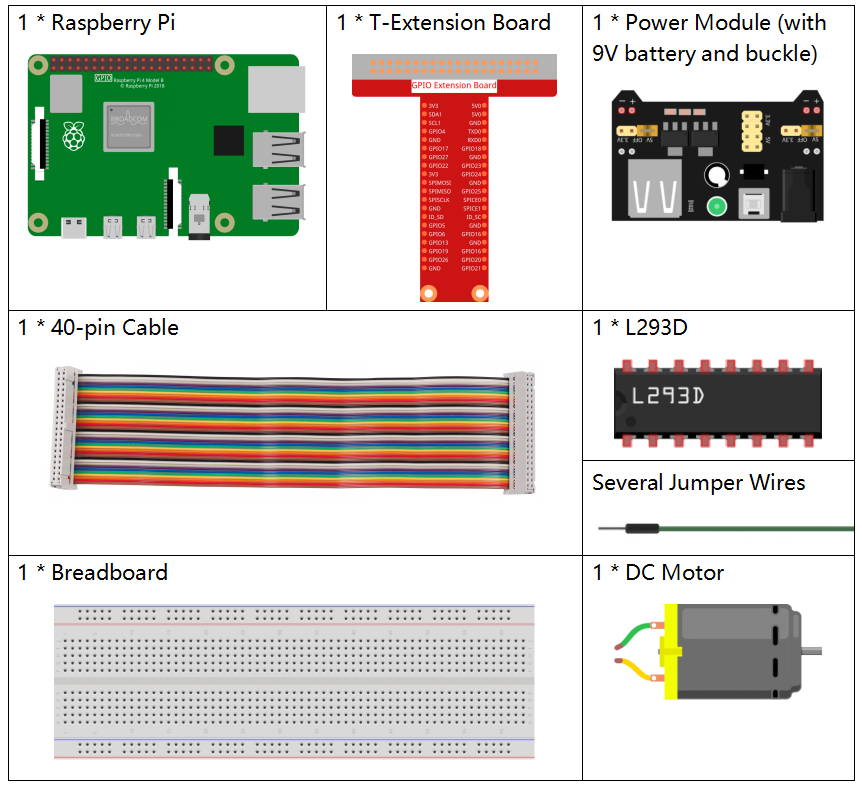
必要なコンポーネント
このプロジェクトでは、以下のコンポーネントが必要です。
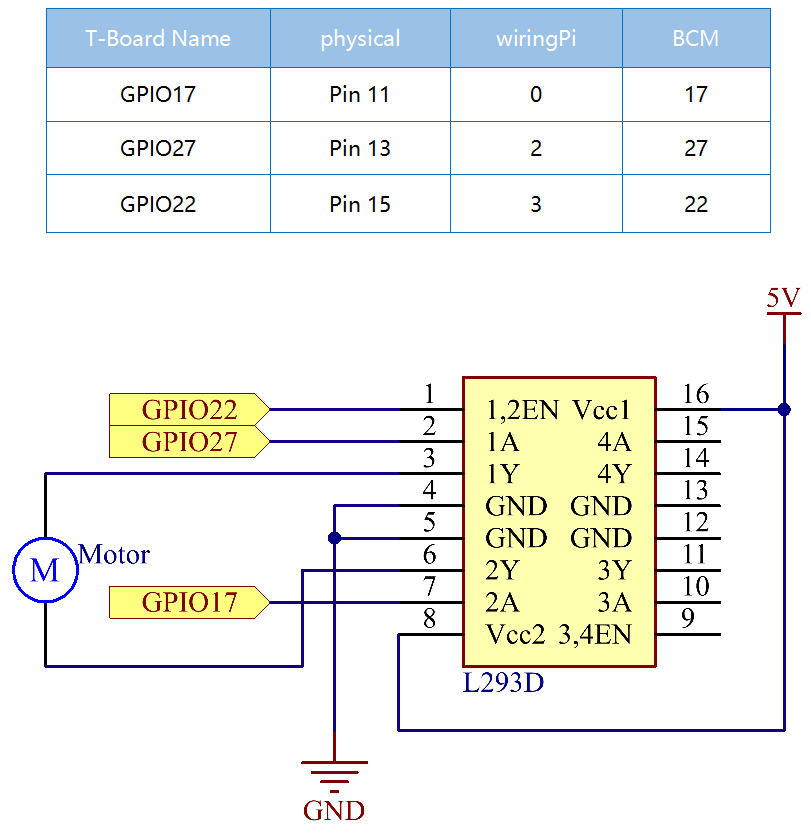
回路図
実験手順
ステップ1: 回路を組み立てます。
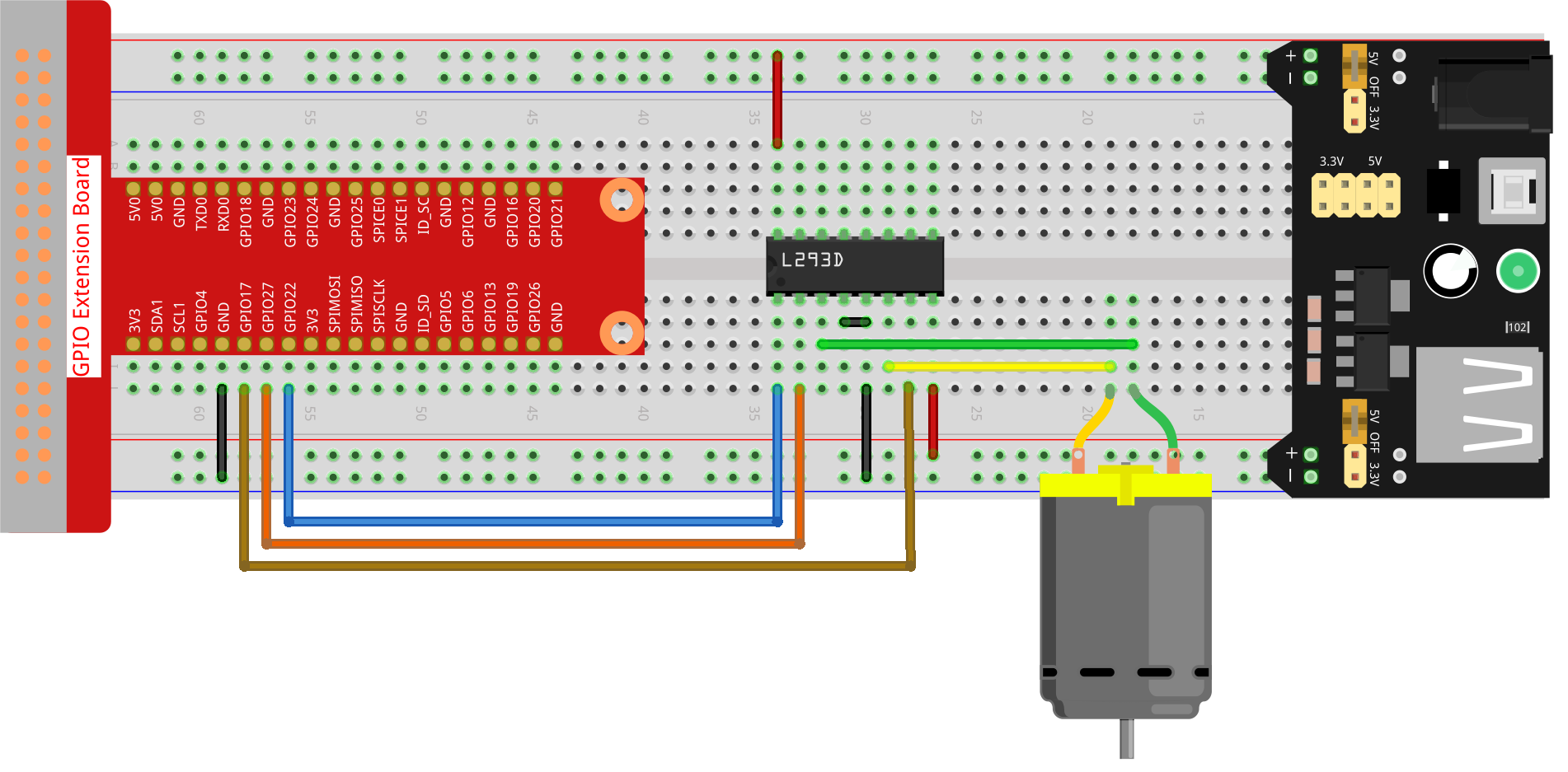
注釈
電源モジュールには、キットに含まれている9Vバッテリーと9Vバッテリーバックルを使用できます。 電源モジュールのジャンパーキャップをブレッドボードの5Vバスストリップに挿入してください。

ステップ2: コードのフォルダに入ります。
cd ~/davinci-kit-for-raspberry-pi/python-pi5
ステップ3: 実行します。
sudo python3 1.3.1_Motor.py
コードが実行されると、モーターは最初に時計回りに5秒間回転し、5秒間停止し、その後、反時計回りに5秒間回転し、その後、モーターは5秒間停止します。この一連の動作は繰り返し実行されます。
警告
エラー メッセージ RuntimeError: Cannot determine SOC peripheral base address が表示された場合は、 「gpiozero」が動作しない場合。 を参照してください。
コード
注釈
以下のコードは変更/リセット/コピー/実行/停止ができます。ただし、コードを変更する前に davinci-kit-for-raspberry-pi/python-pi5 のようなソースコードのパスに移動する必要があります。コードを変更した後、直接実行して効果を確認できます。
#!/usr/bin/env python3
from gpiozero import Motor
from time import sleep
# GPIO Zeroを使用してモーターを初期化し、前進(17)、後退(27)、および有効(22)制御のためのGPIOピンを指定します。
motor = Motor(forward=17, backward=27, enable=22)
try:
# モーターの方向と動きを制御するためのメイン関数です。
# モーターの回転を時計回りと反時計回りに交互に切り替えます。
actions = {'CW': motor.forward, 'CCW': motor.backward, 'STOP': motor.stop} # 読みやすさのためにモーターアクションを定義
while True:
# モーターの方向を制御するために定義されたアクションをループします
for action in ['CW', 'STOP', 'CCW', 'STOP']:
actions[action]() # 現在のアクション(前進、停止、後退、停止)を実行
print(f"{action}") # コンソールに現在のアクションを表示
sleep(5) # 次のアクションに進む前に5秒間停止
except KeyboardInterrupt:
# プログラムを停止するためのキーボード割り込み(Ctrl+Cなど)を正常に処理します
pass
コードの説明
これらのインポートステートメントは、
gpiozeroライブラリからMotorクラスと、timeモジュールからsleep関数を取り込みます。#!/usr/bin/env python3 from gpiozero import Motor from time import sleep
この行は、前進(17)、後退(27)、および有効(22)制御のためのGPIOピンを指定して
Motorオブジェクトを初期化します。# Initialize the Motor with GPIO Zero, specifying GPIO pins for forward (17), backward (27), and enable (22) control motor = Motor(forward=17, backward=27, enable=22)
モーター制御のアクションは、可読性のために辞書で定義されています。無限ループ( while True )がこれらのアクションを繰り返し、各アクションを5秒間実行します。
try: # モーターの方向と動きを制御するメイン関数。 # 時計回りと反時計回りのモーターの回転を交互に行い、間に停止します。 actions = {'CW': motor.forward, 'CCW': motor.backward, 'STOP': motor.stop} # 可読性のためにモーターアクションを定義 while True: # ループを使用して定義されたアクションを制御してモーターの方向を切り替えます for action in ['CW', 'STOP', 'CCW', 'STOP']: actions[action]() # 現在のアクション(前進、停止、後退、停止)を実行します print(f"{action}") # 現在のアクションをコンソールに表示します sleep(5) # 次のアクションに進む前に5秒間一時停止します
このセグメントは、キーボード割り込み(Ctrl+Cなど)を使用してプログラムを安全に終了できるようにします。
except KeyboardInterrupt: # キーボード割り込み(e.g., Ctrl+C)をスムーズに処理してプログラムを停止します pass