注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 愛好家コミュニティ(Facebook)へようこそ! Raspberry Pi、Arduino、ESP32 を仲間と共にさらに深く学びましょう。
参加する理由
専門的なサポート: 購入後の問題や技術的な課題を、コミュニティとチームがサポートします。
学びと共有: ヒントや作例を交換してスキルを高めます。
限定先行情報: 新製品の発表や事前プレビューを入手できます。
特別割引: 最新製品の限定割引を利用できます。
季節イベントと景品: プレゼント企画や季節イベントに参加できます。
👉 一緒にものづくりの世界を探検しませんか?[ここ] をクリックして今すぐ参加!
3.1.4 スマートファン(MCP3008)
注釈
お使いのキットによって、 ADC0834 または MCP3008 のどちらを使用しているかを確認し、対応する説明に進んでください。
はじめに
このプロジェクトでは、モーター、ボタン、サーミスタを使って、手動と自動の両方で動作する風量調整可能なスマートファンを作ります。
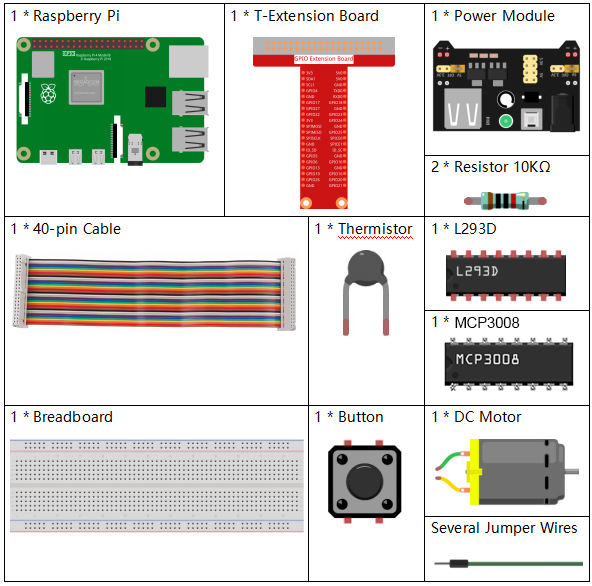
必要な部品
このプロジェクトで使用する部品は以下の通りです。
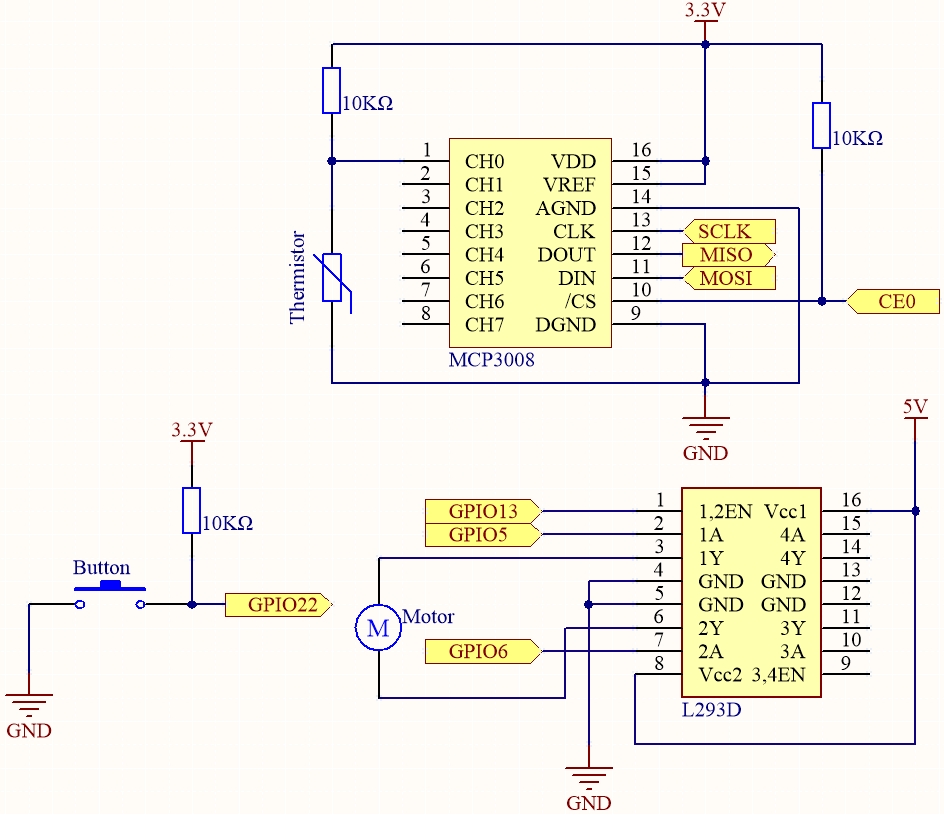
回路図
T-Board 名 |
物理ピン |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
実験手順
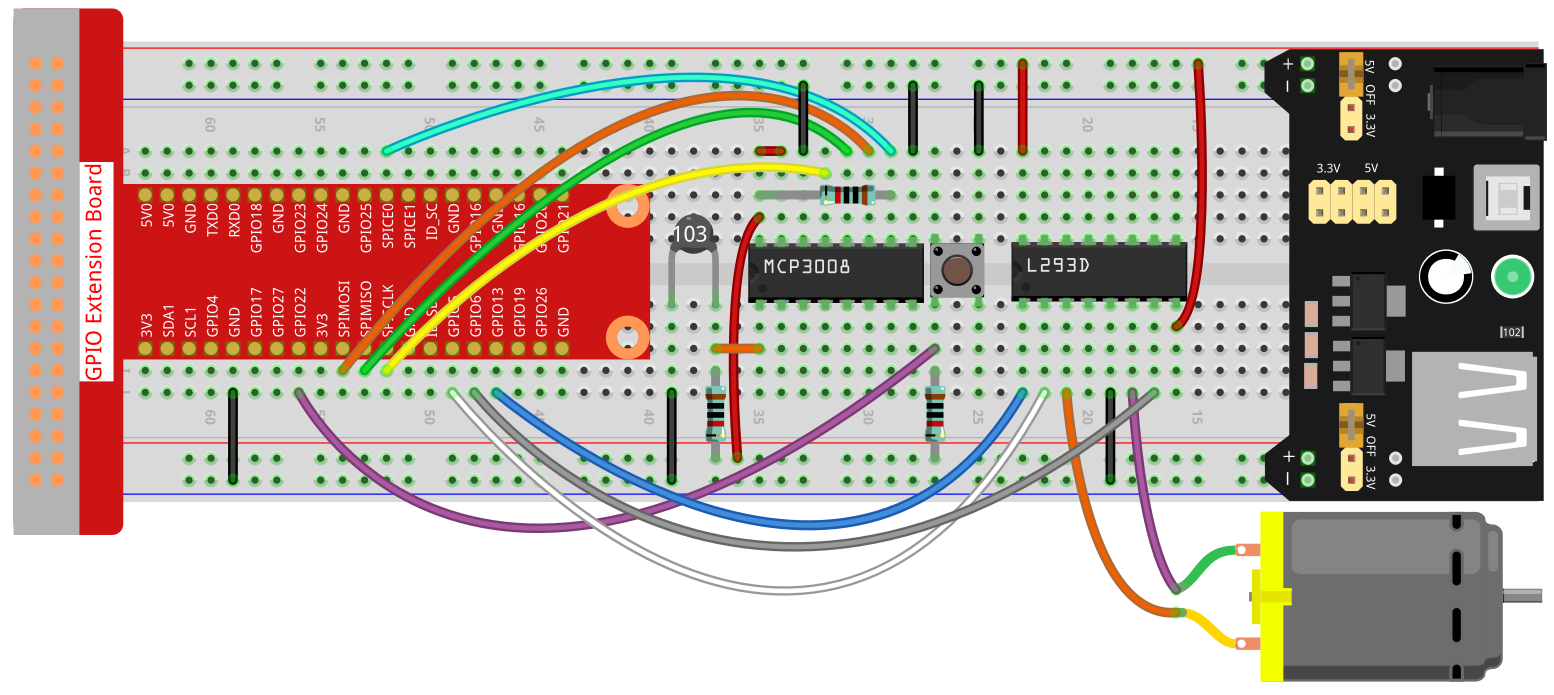
手順1: 回路を組み立てます。
注釈
電源モジュールはキットに付属の 9V 電池スナップで 9V 電池を使用できます。 電源モジュールのジャンパキャップをブレッドボードの 5V バスストリップに挿し込みます。

手順2: コードのあるフォルダに移動します。
cd ~/davinci-kit-for-raspberry-pi/c/3.1.4-2/
手順3: コンパイルします。
gcc 3.1.4_SmartFan.c -o SmartFan -lwiringPi -lm
手順4: 実行ファイルを動かします。
./SmartFan
コードが動作すると、ボタンを押すことでファンを起動できます。 押すたびに速度段階が 1 段階ずつ変わります。速度段階は 0〜4 の 5 段階です。4 段階からさらに押すと停止(0)になります。
温度が ±2℃ 以上変化すると、自動で速度が 1 段階上がるか下がります。
注釈
実行後に動作しない場合や 「wiringPi.h: No such file or directory」というエラーが出る場合は、wiringPi のインストールと確認 を参照してください。
コード
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <softPwm.h>
#include <math.h>
#define SPI_CHANNEL 0
#define SPI_SPEED 1000000
#define MotorPin1 21
#define MotorPin2 22
#define MotorEnable 23
#define BtnPin 3
int read_ADC(int channel)
{
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // 開始ビット
buffer[1] = (8 + channel) << 4; // シングルエンドモード + チャンネル
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int result = ((buffer[1] & 3) << 8) | buffer[2];
return result;
}
int temperture()
{
int analogVal = read_ADC(0);
double Vr = 3.3 * analogVal / 1023.0;
double Rt = 10000.0 * Vr / (3.3 - Vr);
double temp = 1 / (((log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)));
double cel = temp - 273.15;
double Fah = cel * 1.8 + 32;
printf("Celsius: %.2f C Fahrenheit: %.2f F\n", cel, Fah);
return (int)cel;
}
int motor(int level)
{
if (level == 0) {
digitalWrite(MotorEnable, LOW);
return 0;
}
if (level >= 4) {
level = 4;
}
digitalWrite(MotorEnable, HIGH);
softPwmWrite(MotorPin1, level * 25);
return level;
}
void setup()
{
if (wiringPiSetup() == -1) {
printf("wiringPi setup failed!\n");
return;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("SPI setup failed!\n");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable, OUTPUT);
pinMode(BtnPin, INPUT);
}
int main(void)
{
setup();
int currentState, lastState = 0;
int level = 0;
int currentTemp, markTemp = 0;
while (1) {
currentState = digitalRead(BtnPin);
currentTemp = temperture();
if (currentTemp <= 0) continue;
if (currentState == 1 && lastState == 0) {
level = (level + 1) % 5;
markTemp = currentTemp;
delay(500);
}
lastState = currentState;
if (level != 0) {
if (currentTemp - markTemp <= -2) {
level = level - 1;
markTemp = currentTemp;
}
if (currentTemp - markTemp >= 2) {
level = level + 1;
markTemp = currentTemp;
}
}
level = motor(level);
}
return 0;
}
コード解説
int read_ADC(int channel)
{
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Start bit
buffer[1] = (8 + channel) << 4; // Single-ended mode and channel
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int result = ((buffer[1] & 3) << 8) | buffer[2];
return result;
}
MCP3008 の指定チャンネルからアナログ値を読み取ります。 3 バイトの SPI コマンドを送信し、0〜1023 の 10 ビットデジタル値を返します。
int temperture()
{
int analogVal = read_ADC(0);
double Vr = 3.3 * analogVal / 1023.0; // Use 3.3V as Vref for MCP3008
double Rt = 10000.0 * Vr / (3.3 - Vr);
double temp = 1 / (((log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)));
double cel = temp - 273.15;
double Fah = cel * 1.8 + 32;
printf("Celsius: %.2f C Fahrenheit: %.2f F\n", cel, Fah);
return (int)cel;
}
サーミスタからのアナログ値を MCP3008 経由で取得し、電圧・抵抗を計算して摂氏・華氏温度に変換します。 B 定数式(Steinhart–Hart 近似式)を用いて計算します。
int motor(int level)
{
if (level == 0) {
digitalWrite(MotorEnable, LOW);
return 0;
}
if (level >= 4) {
level = 4;
}
digitalWrite(MotorEnable, HIGH);
softPwmWrite(MotorPin1, level * 25);
return level;
}
PWM を用いてファンの速度を制御します。 レベルは 0〜4 の範囲で、0 は停止、1 段階ごとにデューティ比を 25% ずつ増やします。
void setup()
{
if (wiringPiSetup() == -1) {
printf("wiringPi setup failed!\n");
return;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("SPI setup failed!\n");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable, OUTPUT);
pinMode(BtnPin, INPUT);
}
WiringPi を初期化し、SPI を設定します。PWM 出力ピンとボタン入力ピンを構成します。
int main(void)
{
setup();
int currentState, lastState = 0;
int level = 0;
int currentTemp, markTemp = 0;
while (1) {
currentState = digitalRead(BtnPin);
currentTemp = temperture();
if (currentTemp <= 0) continue;
if (currentState == 1 && lastState == 0) {
level = (level + 1) % 5;
markTemp = currentTemp;
delay(500);
}
lastState = currentState;
if (level != 0) {
if (currentTemp - markTemp <= -2) {
level = level - 1;
markTemp = currentTemp;
}
if (currentTemp - markTemp >= 2) {
level = level + 1;
markTemp = currentTemp;
}
}
level = motor(level);
}
return 0;
}
メインループの動作:
ボタン状態と現在の温度を取得
ボタンが押されるとレベルを 1 段階増加(0〜4 を循環)し、その時点の温度を記録
温度が ±2℃ 変化すると自動でレベルを 1 段階増減
motor(level)を呼び出し PWM 出力を更新