Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Accedi in anteprima ai nuovi annunci di prodotti e alle anteprime esclusive.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni festive e concorsi a premi.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi!
2.2.5 Modulo Sensore a Ultrasuoni
Introduzione
Il sensore a ultrasuoni utilizza onde ultrasoniche per rilevare oggetti e misurare le distanze con precisione. Emette onde ultrasoniche e le converte in segnali elettronici.
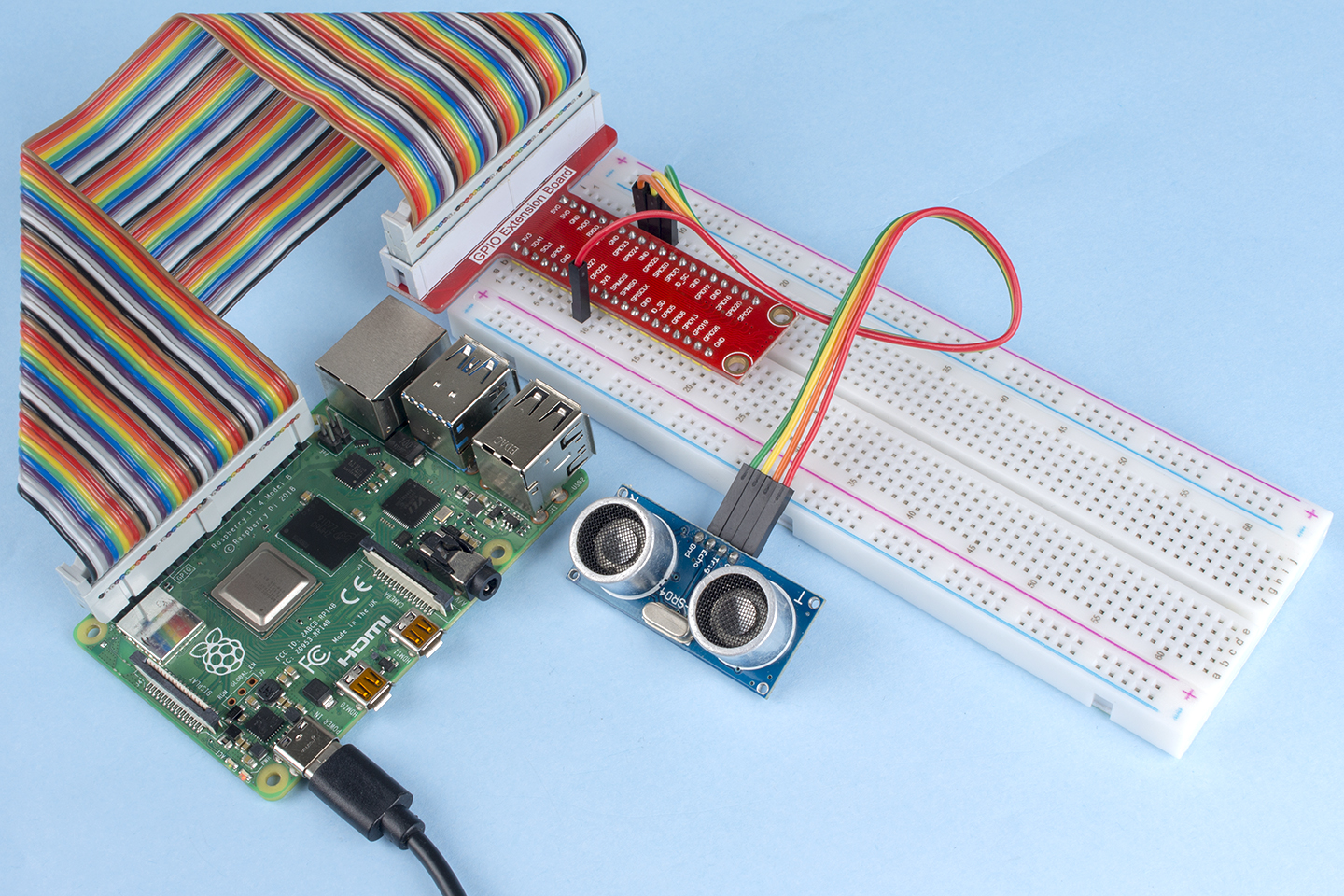
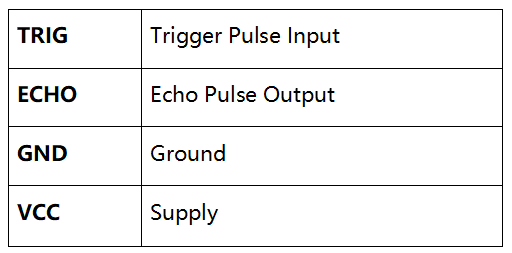
Componenti

Principio di Funzionamento
Ultrasuoni
Il modulo di rilevamento a ultrasuoni offre una funzione di misurazione senza contatto da 2 cm a 400 cm, con una precisione fino a 3 mm. Garantisce un segnale stabile entro i 5 m, che si indebolisce gradualmente oltre i 5 m fino a scomparire alla distanza di 7 m.
Il modulo include trasmettitori e ricevitori a ultrasuoni, oltre a un circuito di controllo. I principi di funzionamento sono i seguenti:
(1) Utilizzare un flip-flop IO per generare un segnale di livello alto di almeno 10us.
(2) Il modulo invia automaticamente otto impulsi a 40kHz e rileva l’eventuale ritorno di un segnale a impulso.
(3) Se il segnale ritorna, il livello alto di output IO indica la durata del tempo trascorso tra la trasmissione e il ritorno dell’onda ultrasonica. La formula per calcolare la distanza è: distanza misurata = (tempo di livello alto x velocità del suono (340 m/s)) / 2.

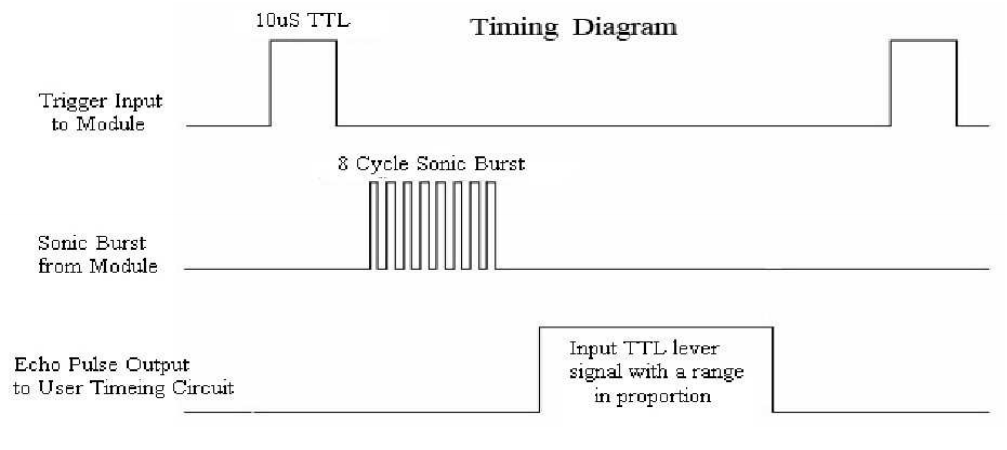
Il diagramma temporale è mostrato di seguito. È sufficiente fornire un breve impulso di 10us all’ingresso trigger per avviare la misurazione. Il modulo emetterà una raffica di 8 cicli di ultrasuoni a 40 kHz e alzerà il segnale di eco. È possibile calcolare la distanza in base all’intervallo di tempo tra l’invio del segnale di trigger e la ricezione del segnale di eco.
Formula: us / 58 = centimetri o us / 148 = pollici; oppure: distanza = tempo di livello alto * velocità del suono (340 m/s) / 2. Si consiglia di utilizzare un ciclo di misurazione superiore a 60 ms per evitare collisioni di segnale tra il trigger e il segnale di eco.
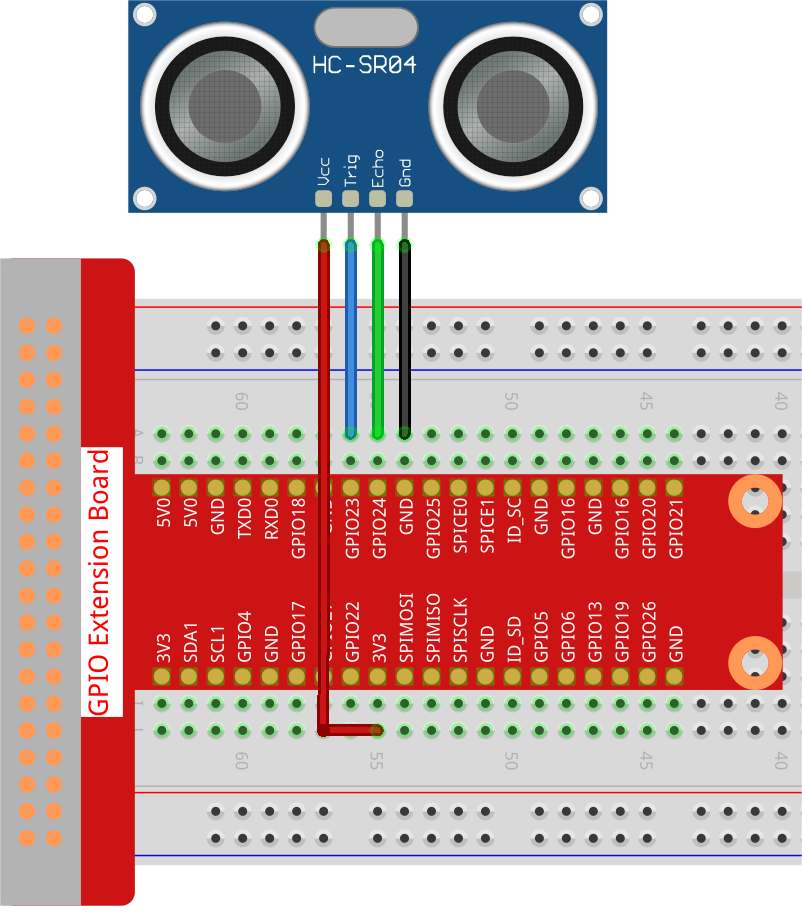
Schema Elettrico

Procedura Sperimentale
Passo 1: Costruire il circuito.
Per Utenti del Linguaggio C
Passo 2: Vai nella cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/c/2.2.5/
Passo 3: Compila il codice.
gcc 2.2.5_Ultrasonic.c -lwiringPi
Passo 4: Esegui il file eseguibile.
sudo ./a.out
Dopo aver eseguito il codice, il modulo sensore a ultrasuoni rileverà la distanza tra l’ostacolo davanti e il modulo stesso; il valore della distanza verrà poi stampato sullo schermo.
Nota
Se non funziona dopo l’esecuzione o viene visualizzato un errore che indica: "wiringPi.h: No such file or directory", fai riferimento a Il codice C non funziona?.
Codice
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 4
#define Echo 5
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
float disMeasure(void)
{
struct timeval tv1;
struct timeval tv2;
long time1, time2;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL);
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL);
time1 = tv1.tv_sec * 1000000 + tv1.tv_usec;
time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(time2 - time1) / 1000000 * 34000 / 2;
return dis;
}
int main(void)
{
float dis;
if(wiringPiSetup() == -1){ //se l'inizializzazione di wiring fallisce, stampa un messaggio a schermo
printf("setup wiringPi failed !");
return 1;
}
ultraInit();
while(1){
dis = disMeasure();
printf("%0.2f cm\n\n",dis);
delay(300);
}
return 0;
}
Spiegazione del Codice
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
Inizializza il pin del sensore a ultrasuoni; contemporaneamente, imposta Echo come ingresso e Trig come uscita.
float disMeasure(void){};
Questa funzione realizza la funzionalità del sensore a ultrasuoni calcolando la distanza rilevata dal ritorno dell’eco.
struct timeval tv1;
struct timeval tv2;
Struct timeval è una struttura utilizzata per memorizzare l’ora corrente. La struttura completa è la seguente:
struct timeval
{
__time_t tv_sec; /* Secondi. */
__suseconds_t tv_usec; /* Microsecondi. */
};
Qui, tv_sec rappresenta i secondi trascorsi dall’Epoch nel creare struct timeval. Tv_usec indica i microsecondi o una frazione di secondo.
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
Viene inviato un impulso ultrasonico di 10 µs.
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL);
Questo ciclo vuoto garantisce che, quando il segnale di trigger è inviato, non ci sia un segnale di eco interferente; poi ottiene l’ora corrente.
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL);
Questo ciclo vuoto assicura che il prossimo passaggio non venga eseguito finché non viene ricevuto il segnale di eco; successivamente, acquisisce l’ora corrente.
time1 = tv1.tv_sec * 1000000 + tv1.tv_usec;
time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;
Converte il tempo memorizzato dalla struct timeval in un tempo totale espresso in microsecondi.
dis = (float)(time2 - time1) / 1000000 * 34000 / 2;
La distanza viene calcolata in base all’intervallo di tempo e alla velocità di propagazione del suono. La velocità del suono nell’aria è di 34000 cm/s.
Per gli Utenti del Linguaggio Python
Passo 2: Vai nella cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python/
Passo 3: Esegui il file eseguibile.
sudo python3 2.2.5_Ultrasonic.py
Dopo l’esecuzione del codice, il modulo sensore a ultrasuoni rileva la distanza tra l’ostacolo di fronte e il modulo stesso, quindi il valore della distanza verrà stampato sullo schermo.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Interrompere il codice qui sotto. Tuttavia, prima di fare ciò, è necessario andare al percorso del codice sorgente, come davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import time
TRIG = 16
ECHO = 18
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
def distance():
GPIO.output(TRIG, 0)
time.sleep(0.000002)
GPIO.output(TRIG, 1)
time.sleep(0.00001)
GPIO.output(TRIG, 0)
while GPIO.input(ECHO) == 0:
a = 0
time1 = time.time()
while GPIO.input(ECHO) == 1:
a = 1
time2 = time.time()
during = time2 - time1
return during * 340 / 2 * 100
def loop():
while True:
dis = distance()
print ('Distance: %.2f' % dis)
time.sleep(0.3)
def destroy():
GPIO.cleanup()
if __name__ == "__main__":
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
Spiegazione del Codice
def distance():
Questa funzione è utilizzata per calcolare la distanza rilevata dal sensore a ultrasuoni.
GPIO.output(TRIG, 1)
time.sleep(0.00001)
GPIO.output(TRIG, 0)
Questo invia un impulso ultrasonico di 10 µs.
while GPIO.input(ECHO) == 0:
a = 0
time1 = time.time()
Questo ciclo vuoto garantisce che, quando viene inviato il segnale di trigger, non ci sia un segnale di eco interferente; quindi acquisisce l’ora corrente.
while GPIO.input(ECHO) == 1:
a = 1
time2 = time.time()
Questo ciclo vuoto assicura che il prossimo passaggio non venga eseguito finché non viene ricevuto il segnale di eco, quindi acquisisce l’ora corrente.
during = time2 - time1
Esegue il calcolo dell’intervallo di tempo.
return during * 340 / 2 * 100
La distanza viene calcolata in base all’intervallo di tempo e alla velocità di propagazione del suono. La velocità del suono nell’aria è di 340 m/s.
Immagine del Fenomeno