Nota
Ciao, benvenuto nella Community di appassionati di Raspberry Pi, Arduino ed ESP32 di SunFounder su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci dei nuovi prodotti e alle anteprime.
Sconti speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni per le festività.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi!
2.2.1 Fotoresistore (MCP3008)
Nota
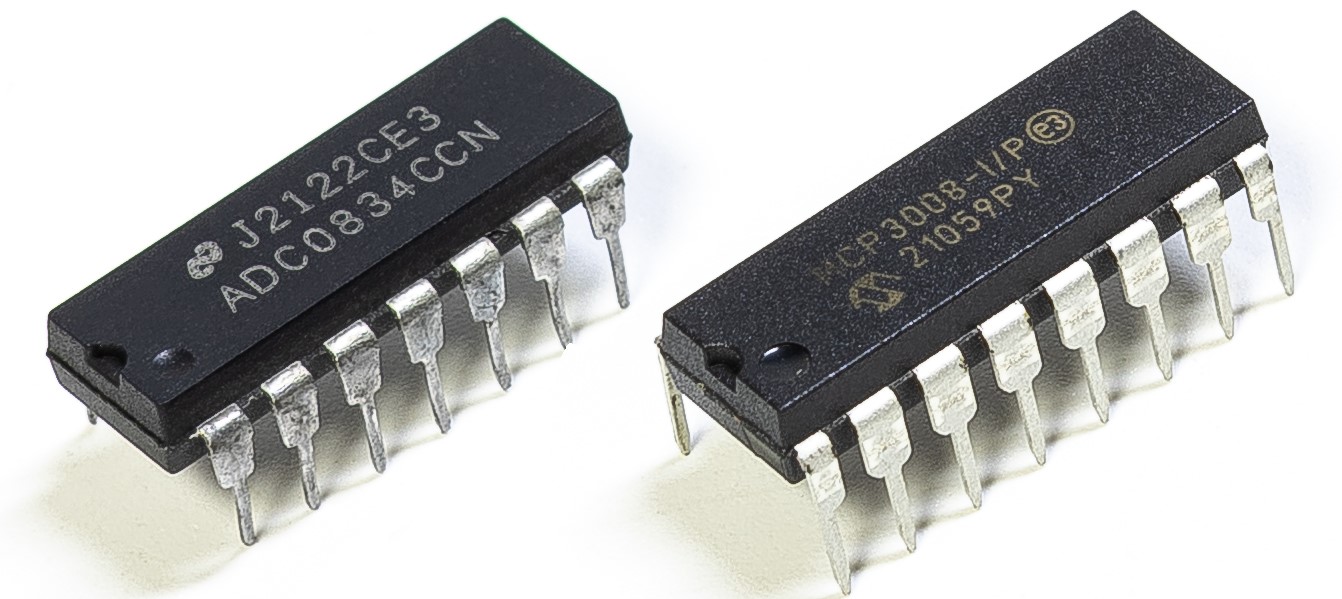
A seconda della versione del tuo kit, identifica se hai ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
Il fotoresistore è un componente comunemente usato per misurare l’intensità della luce ambientale. Aiuta il controller a riconoscere il giorno e la notte e a realizzare funzioni di controllo della luce come la lampada notturna. Questo progetto è molto simile a quello con il potenziometro: anche qui si modifica la tensione, ma per rilevare la luce.
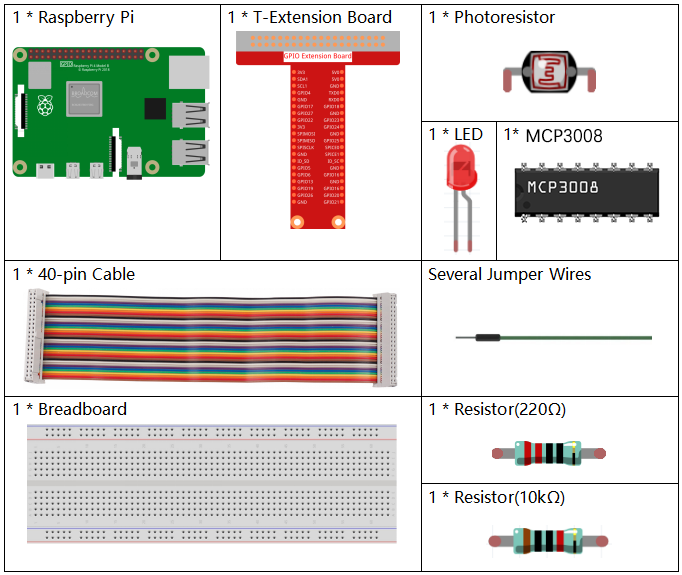
Componenti richiesti
In questo progetto, abbiamo bisogno dei seguenti componenti.
Principio
Un fotoresistore o fotocellula è una resistenza variabile controllata dalla luce. La resistenza di un fotoresistore diminuisce con l’aumentare dell’intensità della luce incidente; in altre parole, presenta fotoconduttività. Un fotoresistore può essere utilizzato in circuiti rivelatori sensibili alla luce e in circuiti di commutazione attivati da luce o buio.

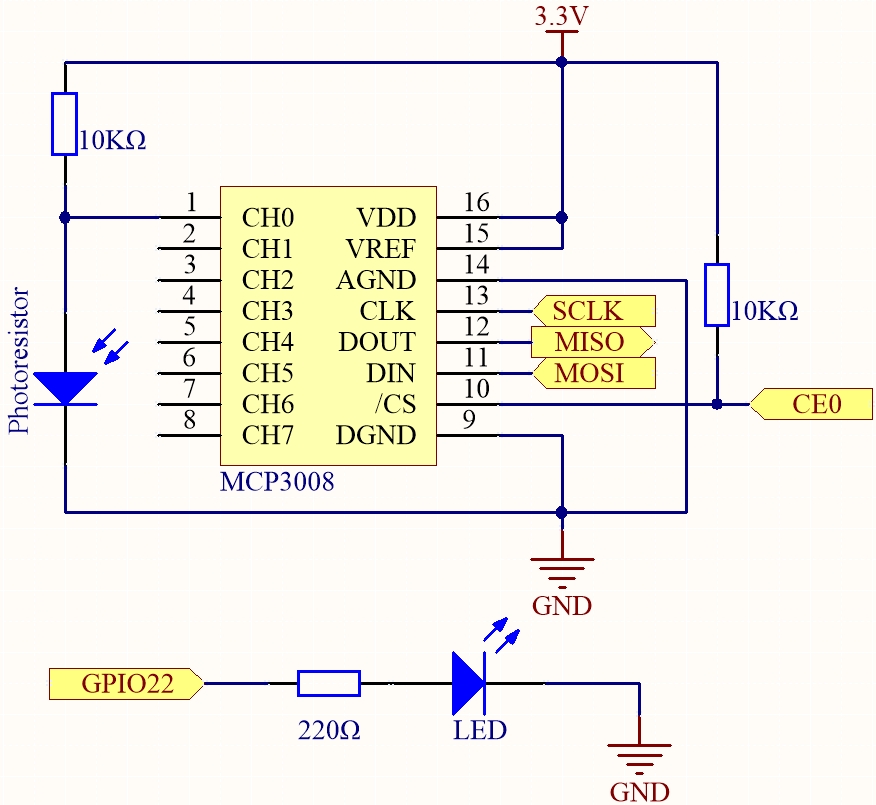
Schema elettrico
Nome T-Board |
fisico |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Procedure sperimentali
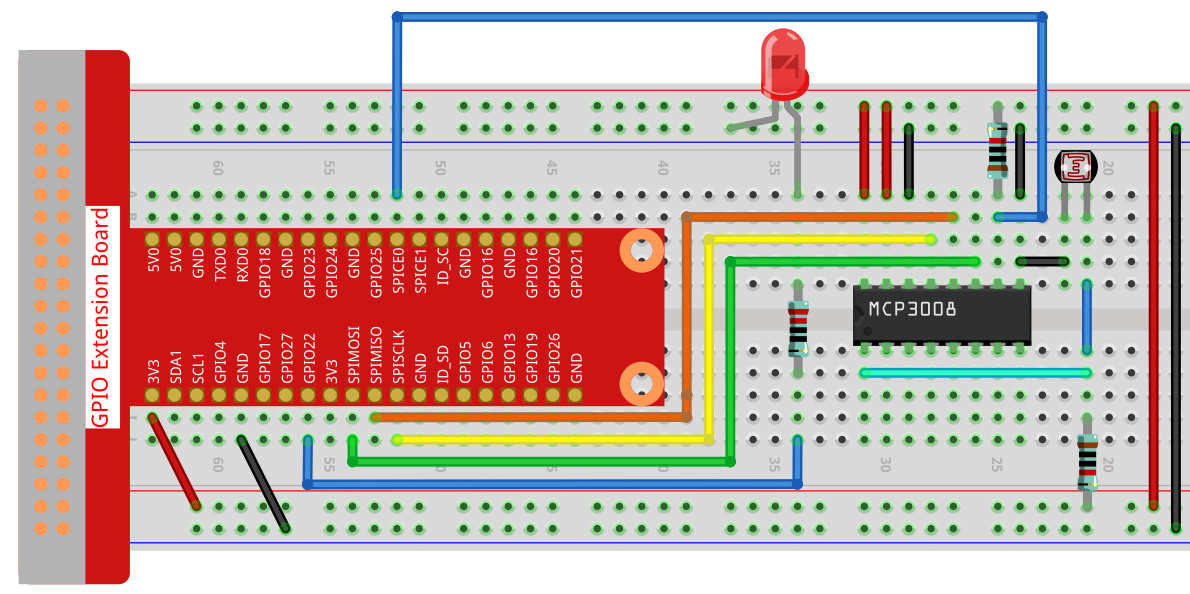
Passo 1: Costruisci il circuito.
Per utenti C
Passo 2: Vai nella cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/c/2.2.1-2/
Passo 3: Compila il codice.
gcc 2.2.1_Photoresistor.c -o photoresistor -lwiringPi -lm
Passo 4: Esegui il file eseguibile.
./photoresistor
Quando il codice è in esecuzione, la luminosità del LED cambierà in base all’intensità della luce rilevata dal fotoresistore.
Nota
Se dopo l’esecuzione non funziona o compare l’errore: «wiringPi.h: No such file or directory», consulta Installare e Verificare WiringPi.
Codice
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <softPwm.h>
#define SPI_CHANNEL 0 // Usa canale SPI 0 (CE0)
#define SPI_SPEED 1000000 // Velocità SPI 1 MHz
#define LedPin 3 // GPIO3 (WiringPi) per PWM LED
// Leggi valore ADC da MCP3008, canale 0~7
int readMCP3008(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Bit di avvio
buffer[1] = (8 + channel) << 4; // SGL/DIF = 1, D2-D0 = canale
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
// Combina il risultato
int result = ((buffer[1] & 3) << 8) | buffer[2];
return result;
}
int main(void) {
if (wiringPiSetup() == -1) {
printf("Inizializzazione wiringPi fallita!\n");
return 1;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("Inizializzazione SPI fallita!\n");
return 1;
}
softPwmCreate(LedPin, 0, 100); // Inizializza PWM software
while (1) {
int analogVal = readMCP3008(0); // Legge da CH0
printf("Valore ADC: %d\n", analogVal);
// Scala il valore ADC (0–1023) all'intervallo PWM (0–100)
int pwmVal = analogVal * 100 / 1023;
softPwmWrite(LedPin, pwmVal);
delay(100);
}
return 0;
}
Spiegazione del codice
Il codice è lo stesso di quello usato in 2.1.4 Potenziometro. Se hai altri dubbi, consulta la spiegazione del codice in 2.1.4 Potenziometro (MCP3008) per i dettagli.
Per utenti Python
Passo 2: Configura l’interfaccia SPI e installa la libreria spidev (vedi Configurazione SPI per le istruzioni).
Se hai già completato questi passaggi, puoi saltare.
Passo 3: Vai nella cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python
Passo 4: Esegui il file Python.
sudo python3 2.2.1-2_photoresistor.py
Quando il codice è in esecuzione, la luminosità del LED cambierà in base all’intensità della luce rilevata dal fotoresistore.
Avvertimento
Se appare l’errore RuntimeError: Cannot determine SOC peripheral base address, consulta Se gpiozero non funziona.
Codice
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
# GPIO per LED PWM
PWM_PIN = 22
# Configurazione GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(PWM_PIN, GPIO.OUT)
# Inizializza PWM (frequenza = 1000Hz)
pwm = GPIO.PWM(PWM_PIN, 1000)
pwm.start(0) # Avvia con duty cycle 0%
# Inizializza SPI (MCP3008 su Bus 0, CE0)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Funzione per leggere valore ADC da MCP3008
def read_adc(channel):
"""
Legge valore analogico da MCP3008 (canale 0–7)
Restituisce: valore a 10 bit (0–1023)
"""
if channel < 0 or channel > 7:
return -1
r = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((r[1] & 3) << 8) | r[2]
return value
try:
while True:
analogVal = read_adc(0)
print(f"value = {analogVal}")
# Scala valore ADC (0–1023) a duty cycle (0–100)
duty_cycle = analogVal * 100 / 1023
pwm.ChangeDutyCycle(duty_cycle)
time.sleep(0.2)
except KeyboardInterrupt:
pass
finally:
pwm.stop()
GPIO.cleanup()
spi.close()
Spiegazione del codice
Importa le librerie necessarie:
RPi.GPIOper controllare i pin GPIO e generare il segnale PWM.spidevper interfacciarsi con l’ADC MCP3008 tramite SPI.timeper gestire il tempo e i ritardi.
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time
Configura il pin GPIO 22 come uscita PWM usando la modalità BCM. Poi inizializza il PWM software a 1000 Hz con un duty cycle iniziale dello 0%.
# Pin GPIO per il LED PWM PWM_PIN = 22 # Configurazione GPIO GPIO.setmode(GPIO.BCM) GPIO.setup(PWM_PIN, GPIO.OUT) # Inizializza PWM (frequenza = 1000Hz) pwm = GPIO.PWM(PWM_PIN, 1000) pwm.start(0) # Avvio con duty cycle 0%
Configura l’interfaccia SPI per comunicare con MCP3008 sul bus 0, chip enable 0 (CE0), e imposta la velocità SPI a 1 MHz.
# Inizializza SPI (MCP3008 su Bus 0, CE0) spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 # 1 MHz
Definisce la funzione
read_adc(channel)per leggere valori analogici dal MCP3008. La funzione invia tre byte al chip e ricostruisce un valore analogico a 10 bit (0–1023) dalla risposta.# Funzione per leggere il valore ADC da MCP3008 def read_adc(channel): """ Legge valore analogico da MCP3008 (canale 0–7) Restituisce: valore a 10 bit (0–1023) """ if channel < 0 or channel > 7: return -1 r = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((r[1] & 3) << 8) | r[2] return value
Questo è il ciclo principale che:
Legge l’ingresso analogico dal canale 0 del MCP3008.
Converte il valore in un duty cycle PWM (0–100%).
Regola la luminosità del LED usando
pwm.ChangeDutyCycle().Si ripete ogni 0,2 secondi.
# Ciclo principale per leggere ADC e impostare la luminosità PWM try: while True: analogVal = read_adc(0) print(f"value = {analogVal}") # Scala valore ADC (0–1023) in duty cycle (0–100) duty_cycle = analogVal * 100 / 1023 pwm.ChangeDutyCycle(duty_cycle) time.sleep(0.2)
Quando l’utente interrompe il programma con Ctrl+C, il PWM e i GPIO vengono puliti correttamente e l’interfaccia SPI viene chiusa.
except KeyboardInterrupt: pass finally: pwm.stop() GPIO.cleanup() spi.close()