Nota
Ciao! Benvenuto nella Community Facebook di SunFounder dedicata agli appassionati di Raspberry Pi, Arduino e ESP32! Scopri di più su Raspberry Pi, Arduino ed ESP32 insieme a tanti altri appassionati.
Perché unirsi?
Supporto Esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi prodotti e anteprime.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e Giveaway Festivi: Partecipa a promozioni festive e giveaway.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.2.6 Modulo MPU6050
Introduzione
L’MPU-6050 è il primo e unico dispositivo al mondo a 6 assi per il rilevamento del movimento (3 assi per il giroscopio e 3 assi per l’accelerometro) progettato per smartphone, tablet e sensori indossabili. Include caratteristiche di bassa potenza, basso costo e alte prestazioni.
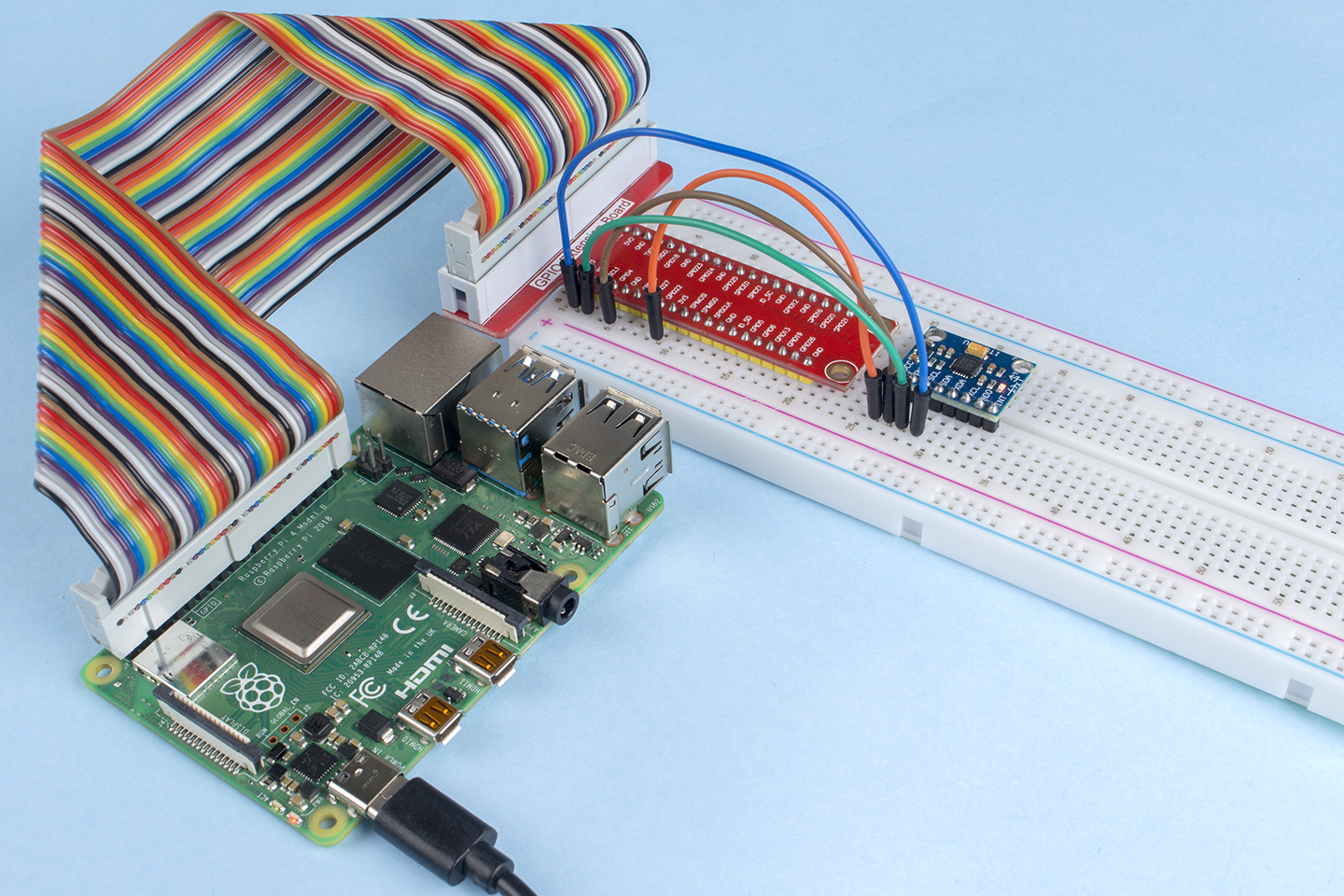
In questo esperimento, useremo I2C per ottenere i valori del sensore di accelerazione a tre assi e del giroscopio a tre assi di MPU6050 e visualizzarli sullo schermo.
Componenti
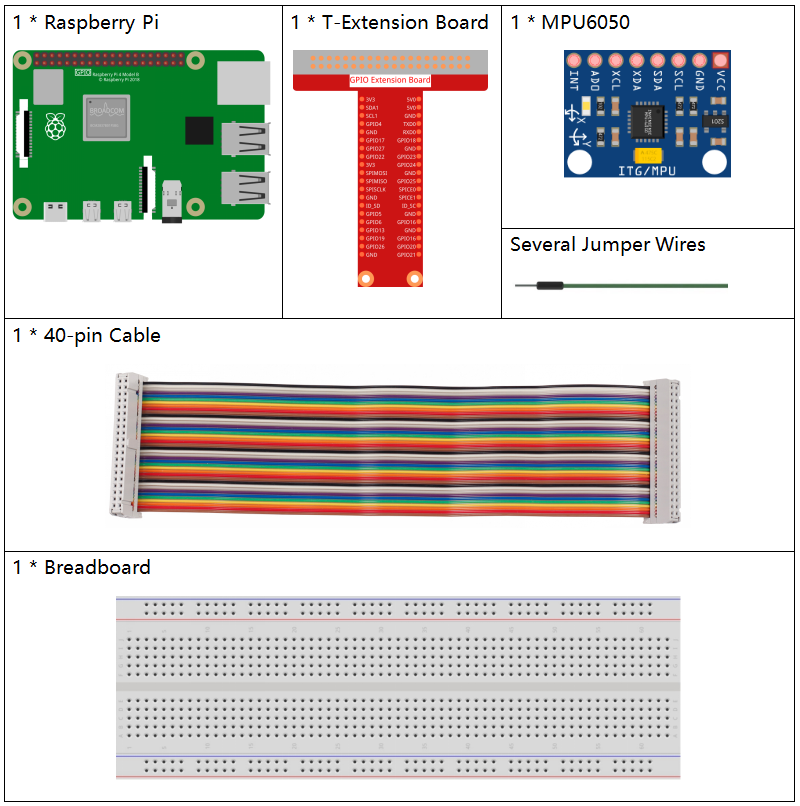
Principio
MPU6050
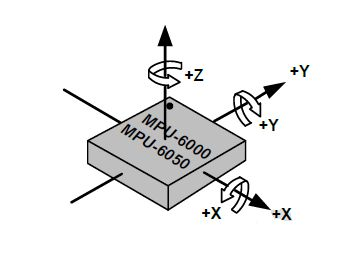
L’MPU-6050 è un dispositivo di rilevamento del movimento a 6 assi (combinazione di giroscopio a 3 assi e accelerometro a 3 assi).
I suoi tre sistemi di coordinate sono definiti come segue:
Posiziona l’MPU6050 su una superficie piana, assicurandoti che la faccia con l’etichetta sia rivolta verso l’alto e che un punto su questa superficie sia in alto a sinistra. La direzione verso l’alto è l’asse z del chip. La direzione da sinistra a destra è l’asse X, mentre la direzione da dietro a davanti è l’asse Y.
Accelerometro a 3 assi
L’accelerometro si basa sull’effetto piezoelettrico, ossia la capacità di alcuni materiali di generare una carica elettrica in risposta a uno stress meccanico.
Immagina una scatola cuboidale con una piccola sfera al suo interno, come nell’immagine sopra. Le pareti della scatola sono costituite da cristalli piezoelettrici. Quando la scatola viene inclinata, la sfera si sposta nella direzione dell’inclinazione a causa della gravità, e la parete con cui la sfera collassa genera piccole correnti piezoelettriche. Esistono tre coppie di pareti opposte in un cuboide, ognuna corrispondente a un asse nello spazio 3D: assi X, Y e Z. In base alla corrente prodotta dalle pareti piezoelettriche, possiamo determinare la direzione e l’ampiezza dell’inclinazione.
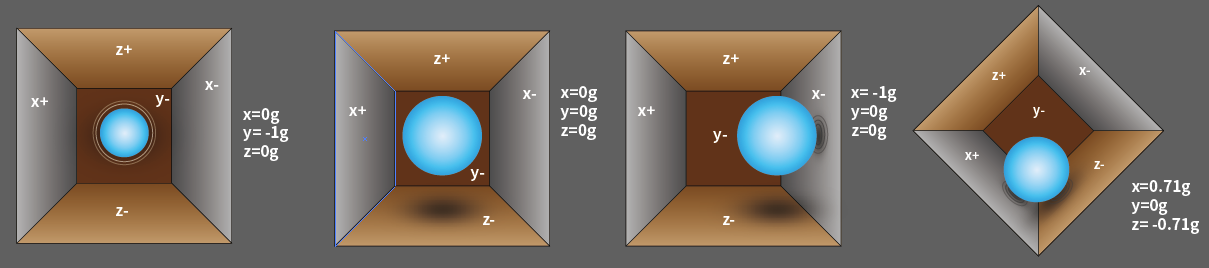
Possiamo usare l’MPU6050 per rilevare l’accelerazione su ciascun asse (quando è fermo, l’accelerazione dell’asse Z è pari a 1 unità di gravità, mentre X e Y sono a 0). Se è inclinato o in condizioni di peso nullo/sovrappeso, le letture cambieranno.
È possibile selezionare quattro gamme di misurazione programmabili: ±2g, ±4g, ±8g e ±16g (impostazione predefinita: 2g) corrispondenti a ogni livello di precisione. I valori vanno da -32768 a 32767.
La lettura dell’accelerometro viene convertita in valore di accelerazione mappando la lettura dal range di lettura alla gamma di misurazione.
Accelerazione = (Dati grezzi asse accelerometro / 65536 * Gamma accelerazione a piena scala) g
Ad esempio, per l’asse X, quando i dati grezzi dell’accelerometro dell’asse X sono 16384 e la gamma selezionata è ±2g:
Accelerazione lungo l’asse X = (16384 / 65536 * 4) g = 1g
Giroscopio a 3 assi
I giroscopi si basano sul principio dell’accelerazione di Coriolis. Immagina una struttura simile a una forcella che si muove costantemente avanti e indietro, mantenuta in posizione da cristalli piezoelettrici. Quando si tenta di inclinare questa struttura, i cristalli sperimentano una forza nella direzione dell’inclinazione, causata dall’inerzia della forcella in movimento. I cristalli generano una corrente in base all’effetto piezoelettrico, e questa corrente viene amplificata.
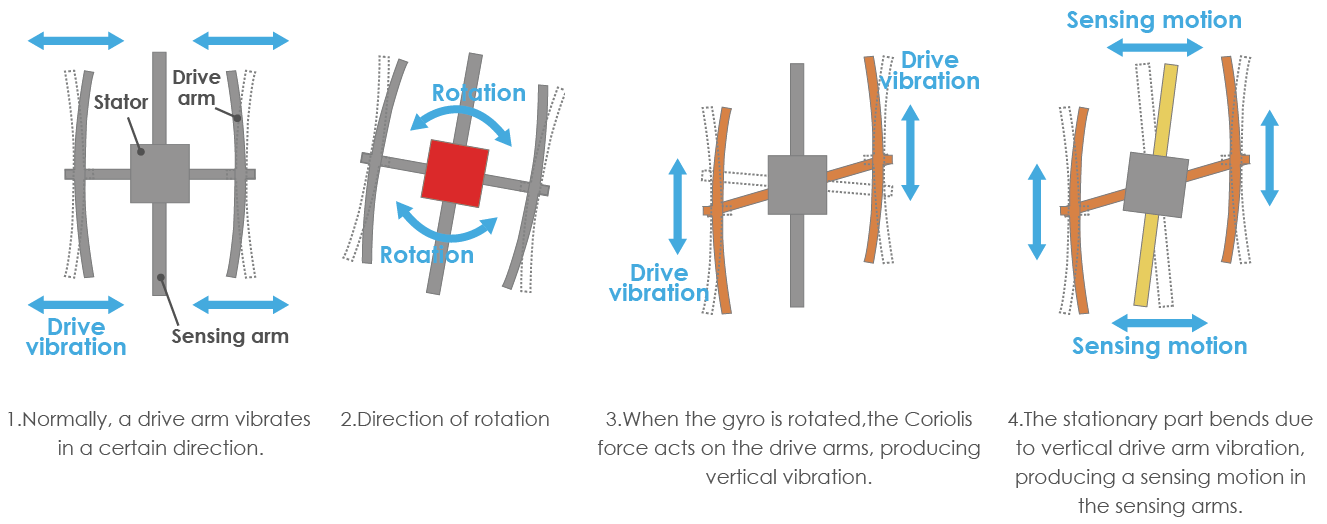
Anche il giroscopio dispone di quattro gamme di misurazione: ±250, ±500, ±1000, ±2000. Il metodo di calcolo è sostanzialmente lo stesso dell’accelerazione.
La formula per convertire la lettura in velocità angolare è:
Velocità angolare = (Dati grezzi asse giroscopio / 65536 * Gamma giroscopio a piena scala) °/s
Ad esempio, per l’asse X, i dati grezzi dell’asse X dell’accelerometro sono 16384 e la gamma è ±250°/s:
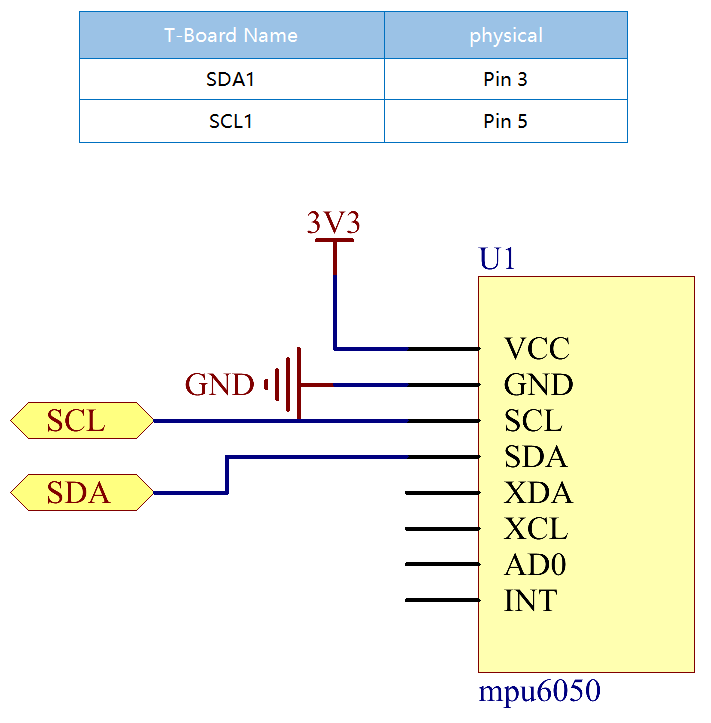
Velocità angolare lungo l’asse X = (16384 / 65536 * 500)°/s = 125°/s Diagramma schematico ————————
L’MPU6050 comunica con il microcontrollore tramite l’interfaccia bus I2C. È necessario collegare SDA1 e SCL1 al pin corrispondente.
Procedure sperimentali
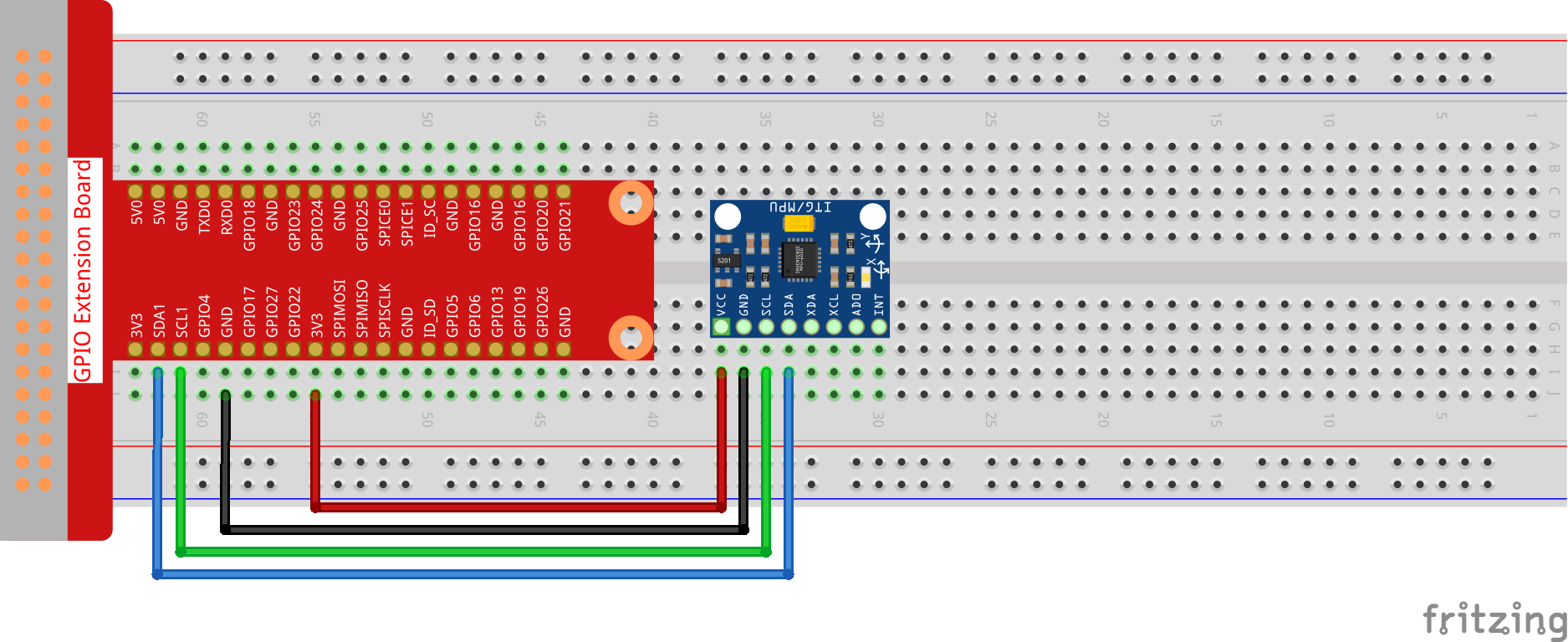
Passo 1: Costruisci il circuito.
Passo 2: Configura I2C (vedi Appendice. Se hai già configurato I2C, salta questo passo.)
Per utenti del linguaggio C
Passo 3: Vai alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/c/2.2.6/
Passo 4: Compila il codice.
gcc 2.2.6_mpu6050.c -lwiringPi -lm
Passo 5: Esegui il file eseguibile.
sudo ./a.out
Una volta eseguito il codice, l’angolo di inclinazione sugli assi X e Y, l’accelerazione e la velocità angolare su ciascun asse letti dal modulo MPU6050 verranno calcolati e visualizzati sullo schermo.
Nota
Se il programma non funziona o compare un messaggio di errore: "wiringPi.h: No such file or directory», consulta la sezione Il codice C non funziona?.
Codice
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include <stdio.h>
#include <math.h>
int fd;
int acclX, acclY, acclZ;
int gyroX, gyroY, gyroZ;
double acclX_scaled, acclY_scaled, acclZ_scaled;
double gyroX_scaled, gyroY_scaled, gyroZ_scaled;
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
double dist(double a, double b)
{
return sqrt((a*a) + (b*b));
}
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
int main()
{
fd = wiringPiI2CSetup(0x68);
wiringPiI2CWriteReg8(fd, 0x6B, 0x00); //disattiva la modalità sleep
printf("set 0x6B=%X\n",wiringPiI2CReadReg8(fd, 0x6B));
while(1) {
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
// Stampa i valori degli assi X, Y e Z del sensore giroscopio.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
delay(100);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
delay(100);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
delay(100);
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
// Stampa i valori degli assi X, Y e Z del sensore di accelerazione.
printf("My acclX_scaled: %f\n", acclX_scaled);
delay(100);
printf("My acclY_scaled: %f\n", acclY_scaled);
delay(100);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
delay(100);
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
delay(100);
}
return 0;
}
Spiegazione del Codice
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
Legge i dati inviati dal sensore MPU6050.
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
Calcola l’angolo di inclinazione sull’asse Y.
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
Calcola l’angolo di inclinazione sull’asse X.
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
// Stampa i valori per gli assi X, Y e Z del giroscopio.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
Legge i valori sugli assi X, Y e Z del giroscopio, converte i dati grezzi in valori di velocità angolare e li stampa.
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
// Stampa i valori sugli assi X, Y e Z dell'accelerometro.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
Legge i valori sugli assi X, Y e Z dell’accelerometro, converte i dati grezzi in valori di accelerazione (unità di gravità) e li stampa.
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
Stampa gli angoli di inclinazione degli assi X e Y.
Per Utenti Python
Passo 3: Vai alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python
Passo 4: Esegui il file eseguibile.
sudo python3 2.2.6_mpu6050.py
Una volta eseguito il codice, l’angolo di inclinazione degli assi X e Y, l’accelerazione e la velocità angolare su ciascun asse letti dal modulo MPU6050 verranno calcolati e visualizzati sullo schermo.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Arrestare il codice qui sotto.
Ma prima, assicurati di essere nel percorso della cartella sorgente come davinci-kit-for-raspberry-pi/python.
import smbus
import math
import time
# Registri di gestione dell'alimentazione
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
bus = smbus.SMBus(1) # o bus = smbus.SMBus(1) per le schede di revisione 2
address = 0x68 # Questo è l'indirizzo letto tramite il comando i2cdetect
# Attiva il 6050, poiché inizia in modalità sleep
bus.write_byte_data(address, power_mgmt_1, 0)
while True:
time.sleep(0.1)
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131))
print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131))
print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled)
print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled)
print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
time.sleep(0.5)
Spiegazione del Codice
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
Legge i dati del sensore inviati dall’MPU6050.
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
Calcola l’angolo di inclinazione sull’asse y.
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
Calcola l’angolo di inclinazione sull’asse x.
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131))
print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131))
print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
Legge i valori degli assi x, y e z dal sensore giroscopico, converte i dati in valori di velocità angolare e li stampa.
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled)
print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled)
print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
Legge i valori degli assi x, y e z dal sensore di accelerazione, converte i dati in valori di velocità accelerata (unità di gravità) e li stampa.
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
Stampa gli angoli di inclinazione degli assi x e y.
Immagine del Fenomeno