Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto tecnico esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni l’accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e Concorsi Festivi: Partecipa a concorsi e promozioni festive.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti subito!
2.1.3 Interruttore di Inclinazione
Introduzione
Questo è un interruttore di inclinazione a sfera con una pallina di metallo all’interno, utilizzato per rilevare inclinazioni di piccoli angoli.
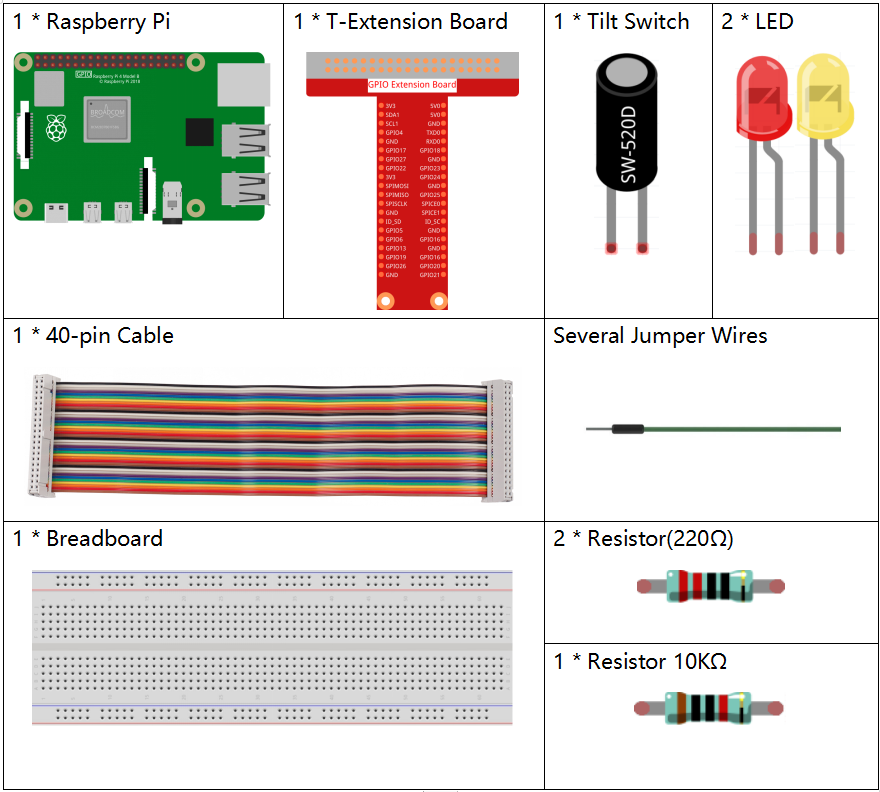
Componenti
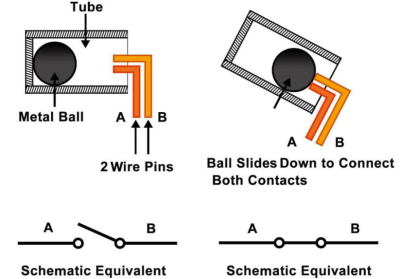
Principio di Funzionamento
Inclinazione
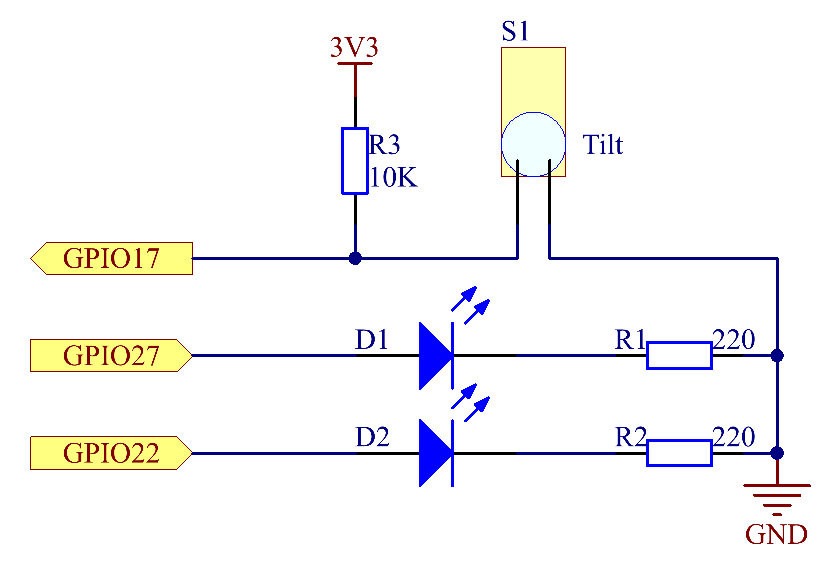
Il principio è molto semplice. Quando l’interruttore viene inclinato di un certo angolo, la pallina all’interno rotola verso il basso e tocca i due contatti collegati ai pin esterni, chiudendo il circuito. In caso contrario, la pallina rimane lontana dai contatti, interrompendo il circuito.
Schema Elettrico
Procedure Sperimentali
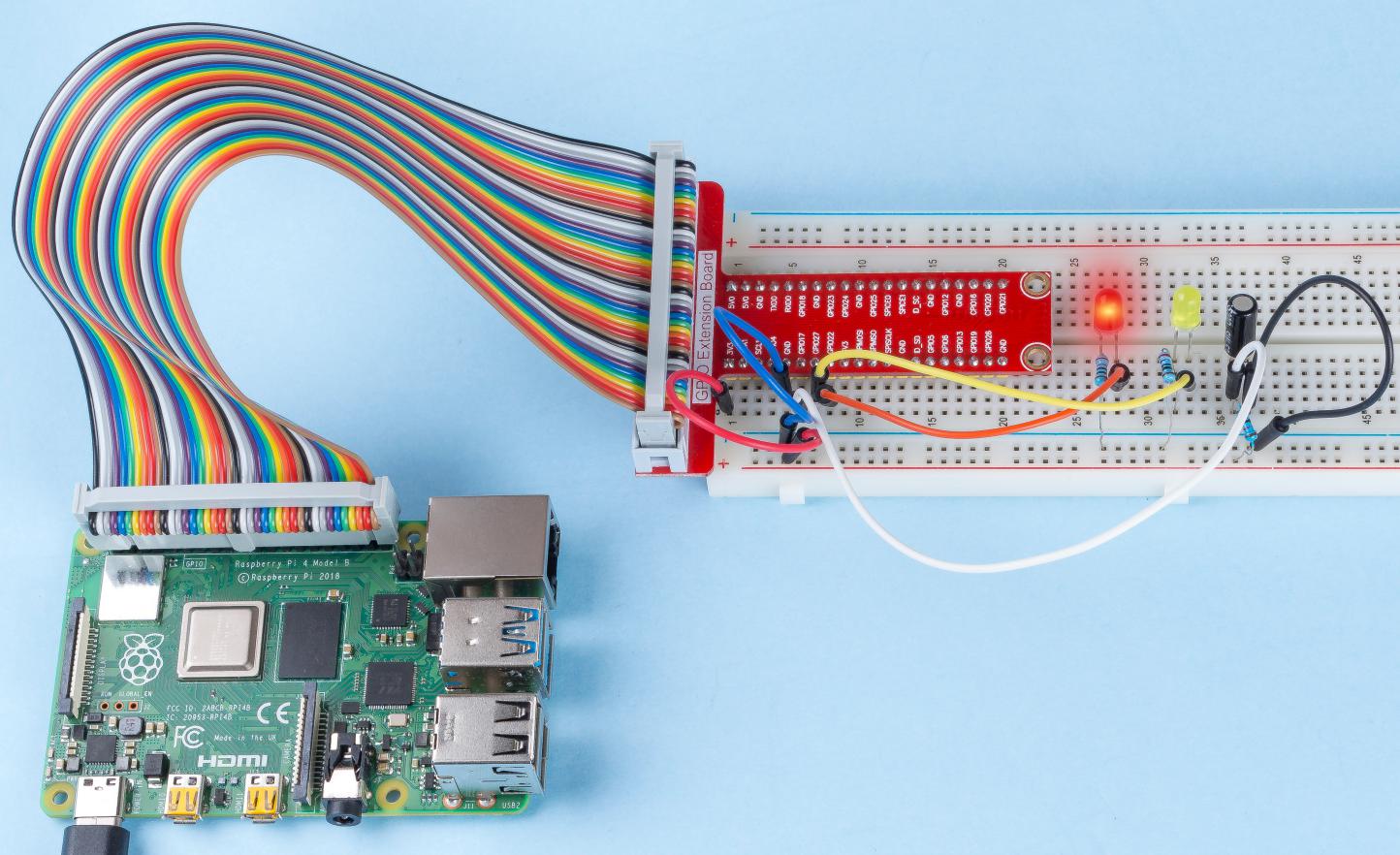
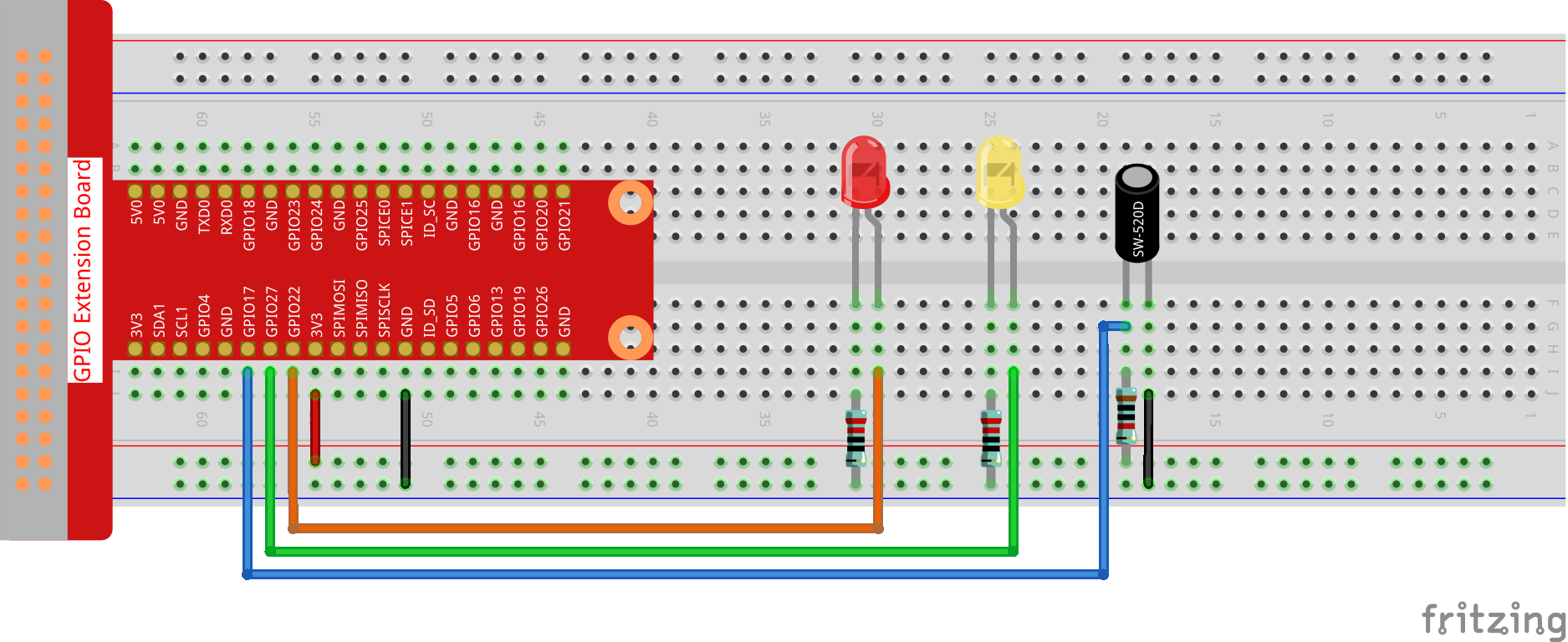
Passo 1: Costruisci il circuito.
Per Utenti C
Passo 2: Cambia la directory.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.3/
Passo 3: Compila il codice.
gcc 2.1.3_Tilt.c -lwiringPi
Passo 4: Esegui.
sudo ./a.out
Posiziona l’interruttore di inclinazione orizzontalmente e il LED verde si accenderà. Se lo inclini, apparirà «Tilt!» sullo schermo e il LED rosso si accenderà. Rimettilo in posizione orizzontale e il LED verde si riaccenderà.
Nota
Se non funziona dopo l’esecuzione o compare un messaggio di errore: "wiringPi.h: No such file or directory», consulta Il codice C non funziona?.
Codice
#include <wiringPi.h>
#include <stdio.h>
#define TiltPin 0
#define Gpin 2
#define Rpin 3
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
int main(void)
{
if(wiringPiSetup() == -1){ //se l'inizializzazione di wiring fallisce, stampa un messaggio
printf("setup wiringPi failed !");
return 1;
}
pinMode(TiltPin, INPUT);
LED("GREEN");
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
delay(100);
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
return 0;
}
Spiegazione del Codice
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
Definisce la funzione LED() per accendere o spegnere i due LED. Se il parametro color è «RED», si accende il LED rosso; allo stesso modo, se il parametro color è «GREEN», si accende il LED verde.
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
Se il valore letto dall’interruttore di inclinazione è 0, significa che è inclinato e quindi il parametro «RED» viene passato alla funzione LED per accendere il LED rosso; altrimenti si accende il LED verde.
Per Utenti Python
Passo 2: Cambia la directory.
cd ~/davinci-kit-for-raspberry-pi/python/
Passo 3: Esegui.
sudo python3 2.1.3_Tilt.py
Posiziona l’interruttore di inclinazione orizzontalmente e si accenderà il LED verde. Se lo inclini, apparirà «Inclinazione rilevata!» sullo schermo e si accenderà il LED rosso. Rimettilo in posizione orizzontale e si riaccenderà il LED verde. ED will lights on.
Code
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Arrestare il codice qui sotto. Tuttavia, prima devi accedere al percorso del codice sorgente come davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import time
dhtPin = 17
GPIO.setmode(GPIO.BCM)
MAX_UNCHANGE_COUNT = 100
STATE_INIT_PULL_DOWN = 1
STATE_INIT_PULL_UP = 2
STATE_DATA_FIRST_PULL_DOWN = 3
STATE_DATA_PULL_UP = 4
STATE_DATA_PULL_DOWN = 5
def readDht11():
GPIO.setup(dhtPin, GPIO.OUT)
GPIO.output(dhtPin, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(dhtPin, GPIO.LOW)
time.sleep(0.02)
GPIO.setup(dhtPin, GPIO.IN, GPIO.PUD_UP)
unchanged_count = 0
last = -1
data = []
while True:
current = GPIO.input(dhtPin)
data.append(current)
if last != current:
unchanged_count = 0
last = current
else:
unchanged_count += 1
if unchanged_count > MAX_UNCHANGE_COUNT:
break
state = STATE_INIT_PULL_DOWN
lengths = []
current_length = 0
for current in data:
current_length += 1
if state == STATE_INIT_PULL_DOWN:
if current == GPIO.LOW:
state = STATE_INIT_PULL_UP
else:
continue
if state == STATE_INIT_PULL_UP:
if current == GPIO.HIGH:
state = STATE_DATA_FIRST_PULL_DOWN
else:
continue
if state == STATE_DATA_FIRST_PULL_DOWN:
if current == GPIO.LOW:
state = STATE_DATA_PULL_UP
else:
continue
if state == STATE_DATA_PULL_UP:
if current == GPIO.HIGH:
current_length = 0
state = STATE_DATA_PULL_DOWN
else:
continue
if state == STATE_DATA_PULL_DOWN:
if current == GPIO.LOW:
lengths.append(current_length)
state = STATE_DATA_PULL_UP
else:
continue
if len(lengths) != 40:
#print ("Data not good, skip")
return False
shortest_pull_up = min(lengths)
longest_pull_up = max(lengths)
halfway = (longest_pull_up + shortest_pull_up) / 2
bits = []
the_bytes = []
byte = 0
for length in lengths:
bit = 0
if length > halfway:
bit = 1
bits.append(bit)
#print ("bits: %s, length: %d" % (bits, len(bits)))
for i in range(0, len(bits)):
byte = byte << 1
if (bits[i]):
byte = byte | 1
else:
byte = byte | 0
if ((i + 1) % 8 == 0):
the_bytes.append(byte)
byte = 0
#print (the_bytes)
checksum = (the_bytes[0] + the_bytes[1] + the_bytes[2] + the_bytes[3]) & 0xFF
if the_bytes[4] != checksum:
#print ("Data not good, skip")
return False
return the_bytes[0], the_bytes[2]
def main():
while True:
result = readDht11()
if result:
humidity, temperature = result
print ("humidity: %s %%, Temperature: %s C`" % (humidity, temperature))
time.sleep(1)
def destroy():
GPIO.cleanup()
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
destroy()
Spiegazione del Codice
GPIO.add_event_detect(TiltPin, GPIO.BOTH, callback=detect, bouncetime=200)
Configura un rilevamento su TiltPin e la funzione di callback per rilevare.
def Led(x):
if x == 0:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
if x == 1:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
Definisci una funzione Led() per accendere o spegnere i due LED. Se x=0, il LED rosso si accende; altrimenti, si accende il LED verde.
def Print(x):
if x == 0:
print (' *************')
print (' * Tilt! *')
print (' *************')
Crea una funzione Print() per visualizzare i caratteri sopra riportati sullo schermo.
def detect(chn):
Led(GPIO.input(TiltPin))
Print(GPIO.input(TiltPin))
Definisci una funzione di callback per il rilevamento dell’inclinazione. Ottieni il valore letto dall’interruttore di inclinazione; successivamente, la funzione Led() controlla l’accensione o lo spegnimento dei due LED in base al valore letto.
Immagine del Fenomeno