Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
3.1.1 Counting Device
Introduction
Here we will make a number-displaying counter system, consisting of a PIR sensor and a 4-digit segment display. When the PIR detects that someone is passing by, the number on the 4-digit segment display will add 1. You can use this counter to count the number of people walking through the passageway.
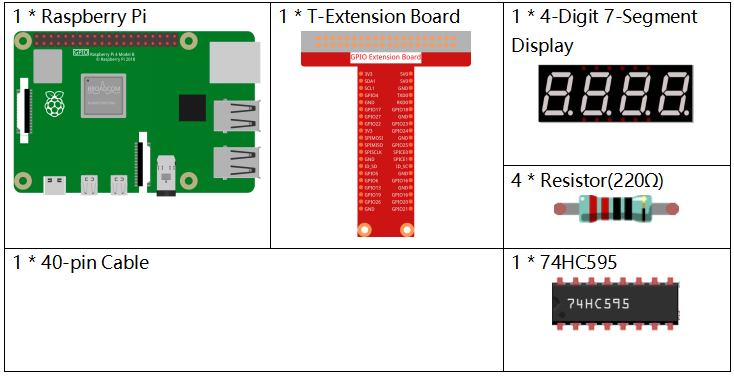
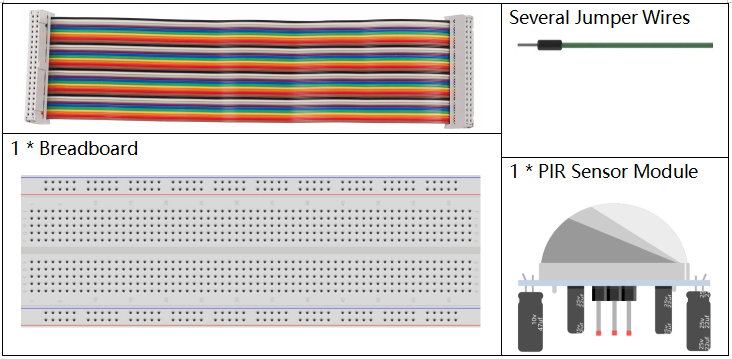
Required Components
In this project, we need the following components.
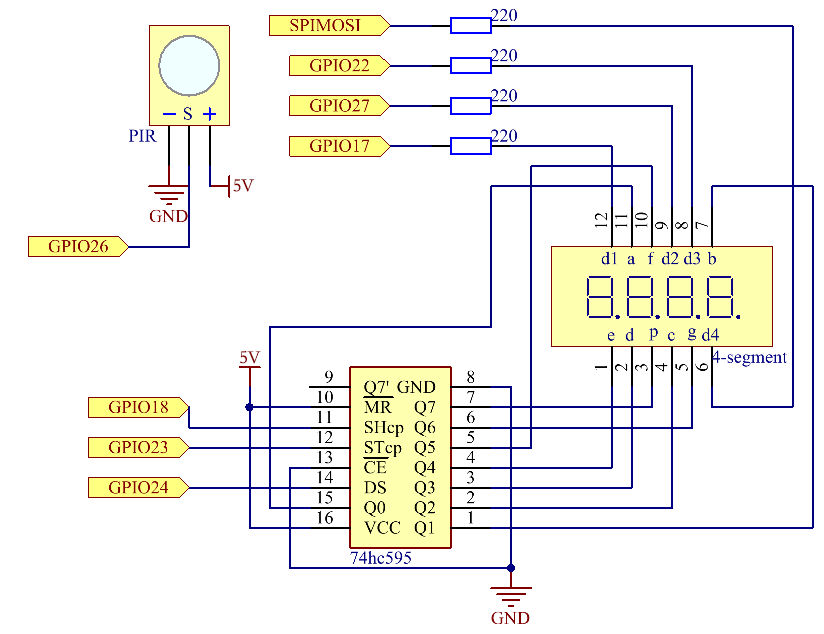
Schematic Diagram
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
SPIMOSI |
Pin 19 |
12 |
10 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO26 |
Pin 37 |
25 |
26 |
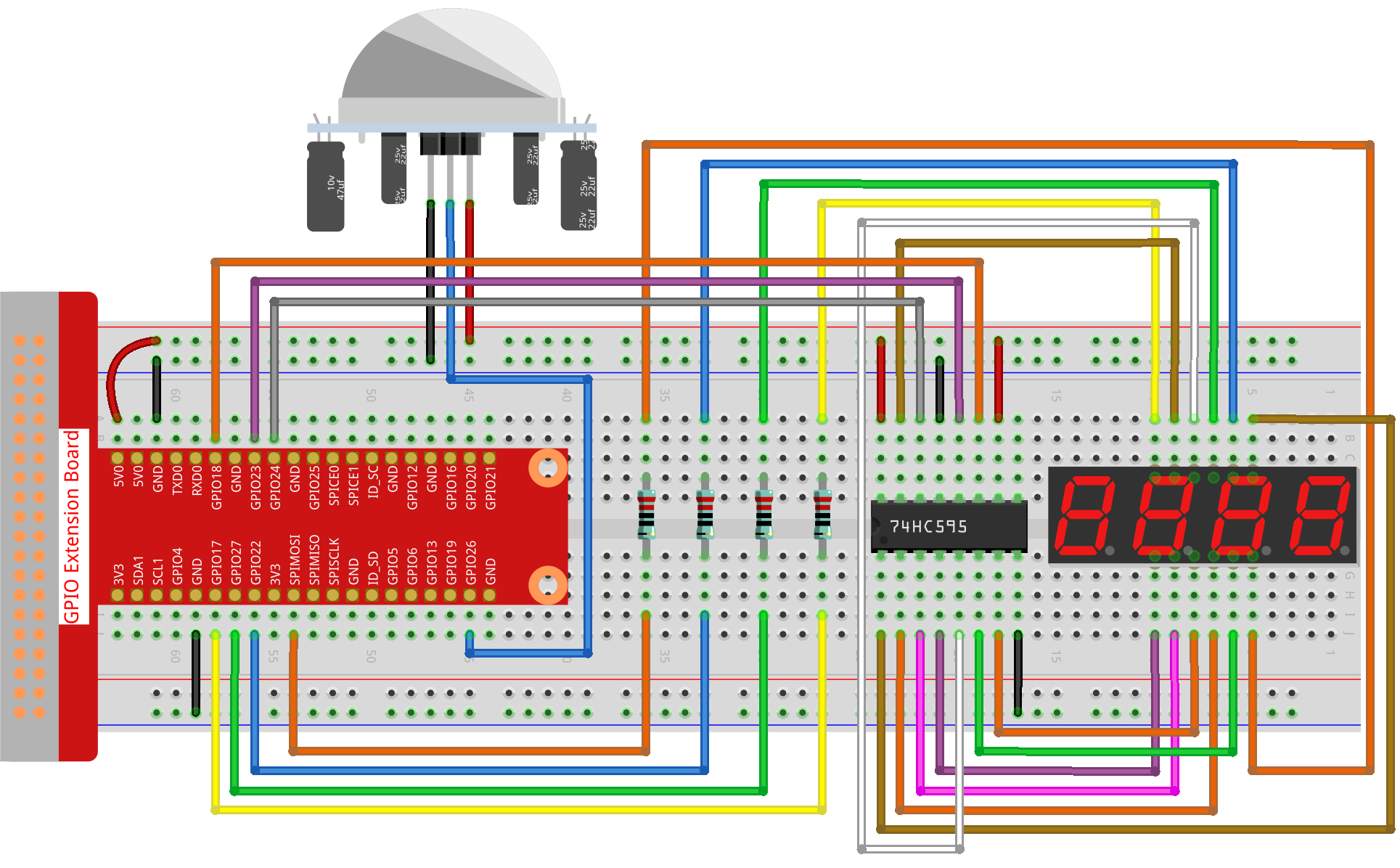
Experimental Procedures
Step 1: Build the circuit.
Step 2: Go to the folder of the code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Step 3: Run the executable file.
sudo python3 3.1.1_CountingDevice.py
After the code runs, when the PIR detects that someone is passing by, the number on the 4-digit segment display will add 1.
There are two potentiometers on the PIR module: one is to adjust sensitivity and the other is to adjust the detection distance. To make the PIR module work better, you You need to turn both of them counterclockwise to the end.

Warning
If there is an error prompt RuntimeError: Cannot determine SOC peripheral base address, please refer to If gpiozero doesn’t work.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like davinci-kit-for-raspberry-pi/python-pi5. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
from gpiozero import OutputDevice, MotionSensor
# Initialize PIR motion sensor on GPIO 26
pir = MotionSensor(26)
# Initialize shift register pins
SDI = OutputDevice(24) # Serial Data Input
RCLK = OutputDevice(23) # Register Clock Input
SRCLK = OutputDevice(18) # Shift Register Clock Input
# Initialize 7-segment display pins
placePin = [OutputDevice(pin) for pin in (10, 22, 27, 17)]
# Define digit codes for 7-segment display
number = (0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90)
# Counter for the displayed number
counter = 0
def clearDisplay():
# Clears the display by setting all segments off
for _ in range(8):
SDI.on()
SRCLK.on()
SRCLK.off()
RCLK.on()
RCLK.off()
def hc595_shift(data):
# Shifts data into the 74HC595 shift register
for i in range(8):
SDI.value = 0x80 & (data << i)
SRCLK.on()
SRCLK.off()
RCLK.on()
RCLK.off()
def pickDigit(digit):
# Activates a specific digit of the 7-segment display
for pin in placePin:
pin.off()
placePin[digit].on()
def display():
# Updates the display with the current counter value
global counter
clearDisplay()
pickDigit(0)
hc595_shift(number[counter % 10])
clearDisplay()
pickDigit(1)
hc595_shift(number[counter % 100//10])
clearDisplay()
pickDigit(2)
hc595_shift(number[counter % 1000//100])
clearDisplay()
pickDigit(3)
hc595_shift(number[counter % 10000//1000])
def loop():
# Main loop to update display and check for motion
global counter
currentState = 0
lastState = 0
while True:
display()
currentState = 1 if pir.motion_detected else 0
if currentState == 1 and lastState == 0:
counter += 1
lastState = currentState
try:
loop()
except KeyboardInterrupt:
# Turn off all pins when the script is interrupted
SDI.off()
SRCLK.off()
RCLK.off()
pass
Code Explanation
This line imports the
OutputDeviceandMotionSensorclasses from thegpiozerolibrary.OutputDevicecan be an LED, motor, or any device that you want to control as an output. TheMotionSensoris typically a PIR (Passive Infrared) sensor used to detect motion.#!/usr/bin/env python3 from gpiozero import OutputDevice, MotionSensor
Initializes the PIR motion sensor connected to GPIO pin 26.
# Initialize PIR motion sensor on GPIO 26 pir = MotionSensor(26)
Initializes GPIO pins connected to the shift register’s Serial Data Input (SDI), Register Clock Input (RCLK), and Shift Register Clock Input (SRCLK).
# Initialize shift register pins SDI = OutputDevice(24) # Serial Data Input RCLK = OutputDevice(23) # Register Clock Input SRCLK = OutputDevice(18) # Shift Register Clock Input
Initializes the pins for each digit of the 7-segment display and defines the binary codes for displaying numbers 0-9.
# Initialize 7-segment display pins placePin = [OutputDevice(pin) for pin in (10, 22, 27, 17)] # Define digit codes for 7-segment display number = (0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90)
Clears the 7-segment display by setting all segments off before displaying the next digit.
def clearDisplay(): # Clears the display by setting all segments off for _ in range(8): SDI.on() SRCLK.on() SRCLK.off() RCLK.on() RCLK.off()
Shifts a byte of data into the 74HC595 shift register, controlling the display segments.
def hc595_shift(data): # Shifts data into the 74HC595 shift register for i in range(8): SDI.value = 0x80 & (data << i) SRCLK.on() SRCLK.off() RCLK.on() RCLK.off()
Selects which digit of the 7-segment display to activate. Each digit is controlled by a separate GPIO pin.
def pickDigit(digit): # Activates a specific digit of the 7-segment display for pin in placePin: pin.off() placePin[digit].on()
Initiate the display for the unit digit first, followed by activating the display for the tens digit. Subsequently, engage the displays for the hundreds and thousands digits in order. This rapid succession of activations creates the illusion of a continuous four-digit display.
def display(): # Updates the display with the current counter value global counter clearDisplay() pickDigit(0) hc595_shift(number[counter % 10]) clearDisplay() pickDigit(1) hc595_shift(number[counter % 100//10]) clearDisplay() pickDigit(2) hc595_shift(number[counter % 1000//100]) clearDisplay() pickDigit(3) hc595_shift(number[counter % 10000//1000])
Defines the main loop where the display is continuously updated, and the PIR sensor’s state is checked. If motion is detected, the counter is incremented.
def loop(): # Main loop to update display and check for motion global counter currentState = 0 lastState = 0 while True: display() currentState = 1 if pir.motion_detected else 0 if currentState == 1 and lastState == 0: counter += 1 lastState = currentState
Runs the main loop and ensures that the script can be interrupted with a keyboard command (Ctrl+C), turning off all pins for a clean exit.
try: loop() except KeyboardInterrupt: # Turn off all pins when the script is interrupted SDI.off() SRCLK.off() RCLK.off() pass