Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
3.1.6 Motion Control
Introduction
In this lesson, we will make a simple motion sensing and controlling device. The MPU6050 is used as a sensor and the stepper motor as a controlled device. With the MPU6050 mounted on the glove, you can control the stepper motor by rotating your wrist.
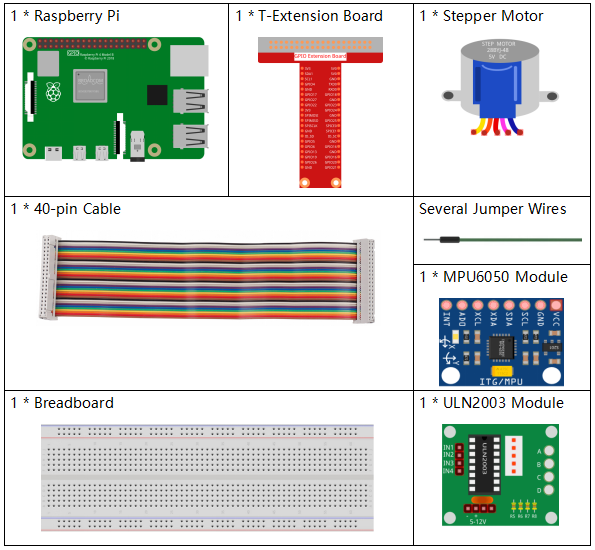
Required Components
In this project, we need the following components.
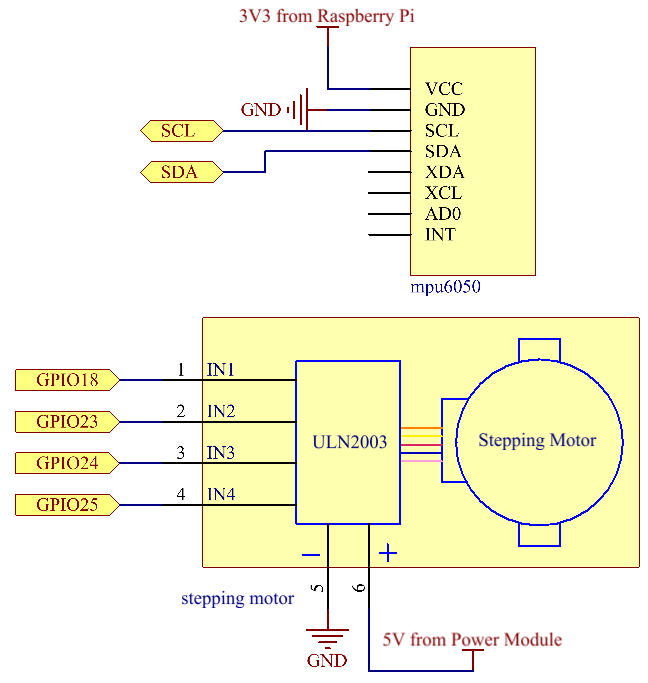
Schematic Diagram
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO25 |
Pin 22 |
6 |
25 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Experimental Procedures
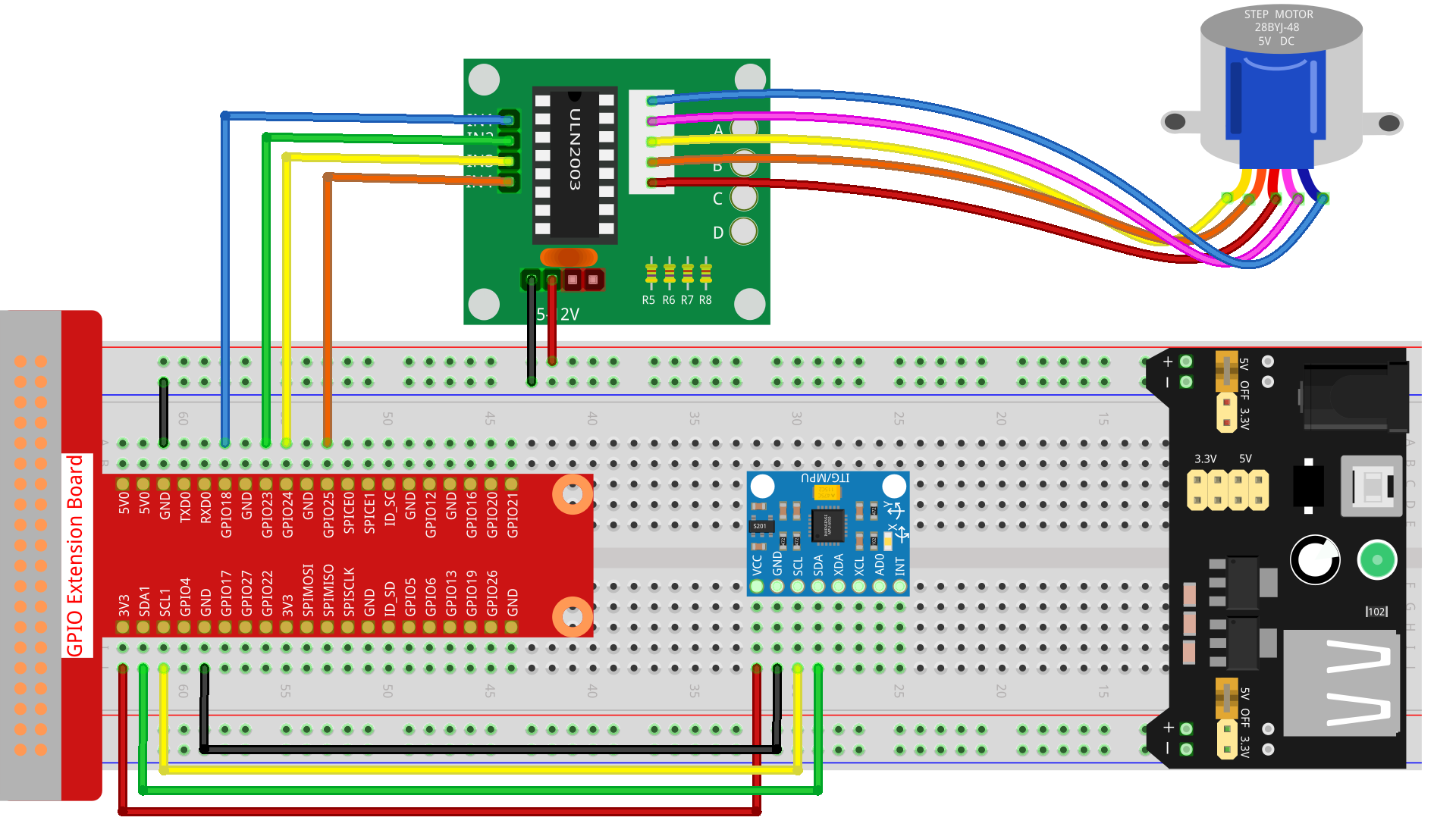
Step 1: Build the circuit.
Step 2: Open the code file.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Step 3: Run.
sudo python3 3.1.6_MotionControl.py
As the code runs, if the tilt angle of mpu6050 on the Y-axis is larger than 45 ℃, the stepper motor rotates anticlockwise; if less than -45 ℃, the stepper motor rotates clockwise.
Warning
If there is an error prompt RuntimeError: Cannot determine SOC peripheral base address, please refer to If gpiozero doesn’t work.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like davinci-kit-for-raspberry-pi/python-pi5. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
from gpiozero import OutputDevice
import smbus
import math
import time
# Initialize power management registers for MPU6050
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
# Set up I2C communication with MPU6050
bus = smbus.SMBus(1) # Initialize SMBus
address = 0x68 # MPU6050 I2C address
bus.write_byte_data(address, power_mgmt_1, 0) # Wake up MPU6050
# Initialize motor pins to GPIO pins 18, 23, 24, 25
motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
# Set motor rotation speed parameters
rolePerMinute = 15
stepsPerRevolution = 2048
# Calculate delay between steps for desired RPM
stepSpeed = (60 / rolePerMinute) / stepsPerRevolution
# Read a single byte from the specified I2C address
def read_byte(adr):
return bus.read_byte_data(address, adr)
# Read a word (2 bytes) from the specified I2C address
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr + 1)
val = (high << 8) + low
return val
# Read a word in 2's complement form
def read_word_2c(adr):
val = read_word(adr)
if val >= 0x8000:
return -((65535 - val) + 1)
else:
return val
# Calculate Euclidean distance between two points
def dist(a, b):
return math.sqrt((a * a) + (b * b))
# Calculate Y-axis rotation
def get_y_rotation(x, y, z):
radians = math.atan2(x, dist(y, z))
return -math.degrees(radians)
# Calculate X-axis rotation
def get_x_rotation(x, y, z):
radians = math.atan2(y, dist(x, z))
return math.degrees(radians)
# Get tilt angle from MPU6050
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle = get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
# Control stepper motor rotation
def rotary(direction):
if direction == 'c':
# Clockwise rotation sequence
for j in range(4):
for i in range(4):
if 0x99 >> j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
time.sleep(stepSpeed)
elif direction == 'a':
# Anti-clockwise rotation sequence
for j in range(4):
for i in range(4):
if 0x99 << j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
time.sleep(stepSpeed)
# Main loop for continuously reading tilt angle and controlling motor
try:
while True:
angle = mpu6050()
if angle >= 45:
rotary('a') # Rotate anti-clockwise for positive tilt
elif angle <= -45:
rotary('c') # Rotate clockwise for negative tilt
except KeyboardInterrupt:
# Turn off all motor pins on keyboard interrupt
for pin in motorPin:
pin.off()
Code Explanation
The script begins by importing necessary libraries.
gpiozerofor controlling the GPIO pins,smbusfor I2C communication,mathfor mathematical operations, andtimefor delays.#!/usr/bin/env python3 from gpiozero import OutputDevice import smbus import math import time
Sets up I2C communication with the MPU6050 sensor.
power_mgmt_1andpower_mgmt_2are registers for managing the sensor’s power. The sensor is “woken up” by writing topower_mgmt_1.# Initialize power management registers for MPU6050 power_mgmt_1 = 0x6b power_mgmt_2 = 0x6c # Set up I2C communication with MPU6050 bus = smbus.SMBus(1) # Initialize SMBus address = 0x68 # MPU6050 I2C address bus.write_byte_data(address, power_mgmt_1, 0) # Wake up MPU6050
Initializes the GPIO pins (18, 23, 24, 25) on the Raspberry Pi to control the stepper motor. Each pin is associated with a coil in the motor.
# Initialize motor pins to GPIO pins 18, 23, 24, 25 motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
Sets the motor’s rotations per minute (RPM) and the number of steps per revolution.
stepSpeedcalculates the delay between steps to achieve the desired RPM, ensuring smooth motor operation.# Set motor rotation speed parameters rolePerMinute = 15 stepsPerRevolution = 2048 # Calculate delay between steps for desired RPM stepSpeed = (60 / rolePerMinute) / stepsPerRevolution
These functions are used for I2C communication.
read_bytereads a single byte from a given address, whileread_wordreads two bytes (a word), combining them into a single value using bitwise operations (<<and+).# Read a single byte from the specified I2C address def read_byte(adr): return bus.read_byte_data(address, adr) # Read a word (2 bytes) from the specified I2C address def read_word(adr): high = bus.read_byte_data(address, adr) low = bus.read_byte_data(address, adr + 1) val = (high << 8) + low return val
This function converts the read word into a 2’s complement form, which is useful for interpreting signed values from sensor data. This conversion is necessary for handling negative sensor readings.
# Read a word in 2's complement form def read_word_2c(adr): val = read_word(adr) if val >= 0x8000: return -((65535 - val) + 1) else: return val
distcalculates the Euclidean distance between two points, used in the rotation calculations.get_y_rotationandget_x_rotationcalculate the rotational angles along the Y and X axes, respectively, using theatan2function from themathlibrary and converting the result to degrees.# Calculate Euclidean distance between two points def dist(a, b): return math.sqrt((a * a) + (b * b)) # Calculate Y-axis rotation def get_y_rotation(x, y, z): radians = math.atan2(x, dist(y, z)) return -math.degrees(radians) # Calculate X-axis rotation def get_x_rotation(x, y, z): radians = math.atan2(y, dist(x, z)) return math.degrees(radians)
This function reads the accelerometer data from the MPU6050 sensor, scales the readings, and calculates the tilt angle using the
get_y_rotationfunction. The functionread_word_2creads sensor data in 2’s complement form to handle negative values.# Get tilt angle from MPU6050 def mpu6050(): accel_xout = read_word_2c(0x3b) accel_yout = read_word_2c(0x3d) accel_zout = read_word_2c(0x3f) accel_xout_scaled = accel_xout / 16384.0 accel_yout_scaled = accel_yout / 16384.0 accel_zout_scaled = accel_zout / 16384.0 angle = get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled) return angle
The
rotaryfunction controls the stepper motor rotation. It executes a stepping sequence for either clockwise or anti-clockwise rotation, based on thedirectionparameter. The sequence involves turning specific motor pins on or off in a pattern.# Control stepper motor rotation def rotary(direction): if direction == 'c': # Clockwise rotation sequence for j in range(4): for i in range(4): if 0x99 >> j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() time.sleep(stepSpeed) elif direction == 'a': # Anti-clockwise rotation sequence for j in range(4): for i in range(4): if 0x99 << j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() time.sleep(stepSpeed)
The main loop continuously reads the tilt angle from the MPU6050 sensor and controls the motor’s rotation direction based on the angle. If the program is interrupted (e.g., through a keyboard interrupt), it turns off all motor pins for safety.
# Main loop for continuously reading tilt angle and controlling motor try: while True: angle = mpu6050() if angle >= 45: rotary('a') # Rotate anti-clockwise for positive tilt elif angle <= -45: rotary('c') # Rotate clockwise for negative tilt except KeyboardInterrupt: # Turn off all motor pins on keyboard interrupt for pin in motorPin: pin.off()