Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [ ici ] et rejoignez-nous aujourd’hui !
5.5 Utiliser une Bibliothèque Interne¶
Dans l’IDE Arduino, vous pouvez utiliser de nombreuses bibliothèques intégrées en ajoutant directement le fichier .h correspondant à votre code.
Ce projet utilise la bibliothèque Servo pour piloter le servomoteur, afin qu’il puisse pivoter entre 0° et 180°.
Composants requis
Pour ce projet, nous avons besoin des composants suivants.
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DE CE KIT |
LIEN |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
Schéma
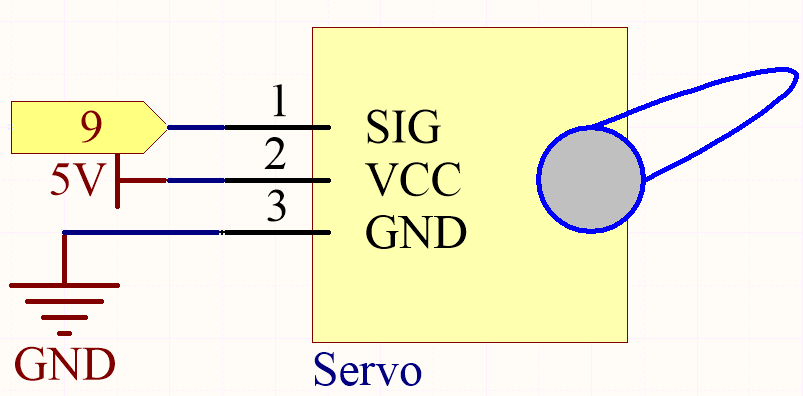
Dans ce projet, nous utilisons la broche PWM 9 pour piloter le servomoteur, et connectons le fil orange du servomoteur à la broche PWM 9, le fil rouge à 5V et le fil marron à GND.
Câblage

Code
Note
Ouvrez le fichier
5.5.use_internal_library.inosous le chemin3in1-kit\basic_project\5.5.use_internal_library.Ou copiez ce code dans Arduino IDE.
Ou téléchargez le code via l”Arduino Web Editor.
Une fois que vous avez fini de télécharger les codes sur la carte R3, vous pouvez voir le bras du servo pivoter dans la plage de 0° à 180°.
Comment ça fonctionne ?
En appelant la bibliothèque Servo.h, vous pouvez facilement piloter le servo.
#include <Servo.h>
Fonctions de la Bibliothèque :
Servo
Créez un objet Servo pour contrôler un servo.
uint8_t attach(int pin);
Appelez pinMode() pour transformer une broche en pilote de servo et retourner 0 en cas d’échec.
void detach();
Libérez une broche du pilotage de servo.
void write(int value);
Réglez l’angle du servo en degrés, de 0 à 180.
int read();
Retourne la valeur définie avec le dernier write().
bool attached();
Retourne 1 si le servo est actuellement attaché.