Nota
¡Hola, bienvenido a la Comunidad de Aficionados a Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Profundiza en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones festivas y sorteos: Participa en sorteos y promociones de fiestas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy!
6.4 Ayuda para Reversa¶
Con el desarrollo de la ciencia y la tecnología, se han instalado muchos productos de alta tecnología en los automóviles, entre los cuales el sistema de asistencia para la reversa es uno de ellos. Aquí utilizamos un módulo ultrasónico, LCD, LED y zumbador para hacer un sistema simple de asistencia ultrasónica para la reversa.
Componentes Necesarios
Para este proyecto, necesitamos los siguientes componentes.
Comprar un kit completo es definitivamente conveniente, aquí está el enlace:
Nombre |
ELEMENTOS DE ESTE KIT |
ENLACE |
|---|---|---|
3 in 1 Starter Kit |
380+ |
También puedes comprarlos por separado en los siguientes enlaces.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
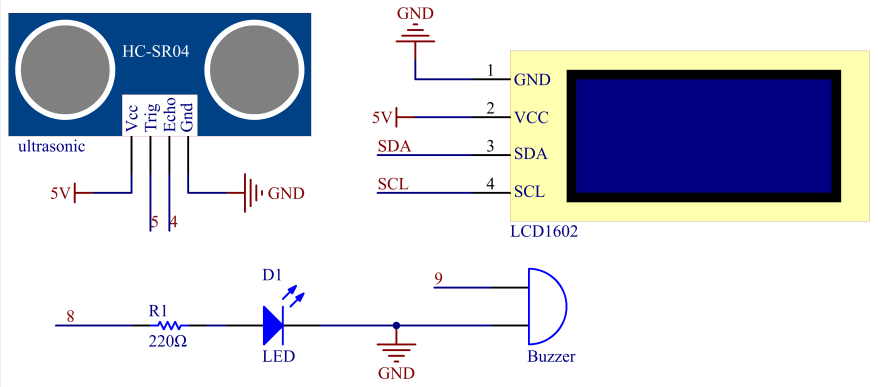
Esquemático
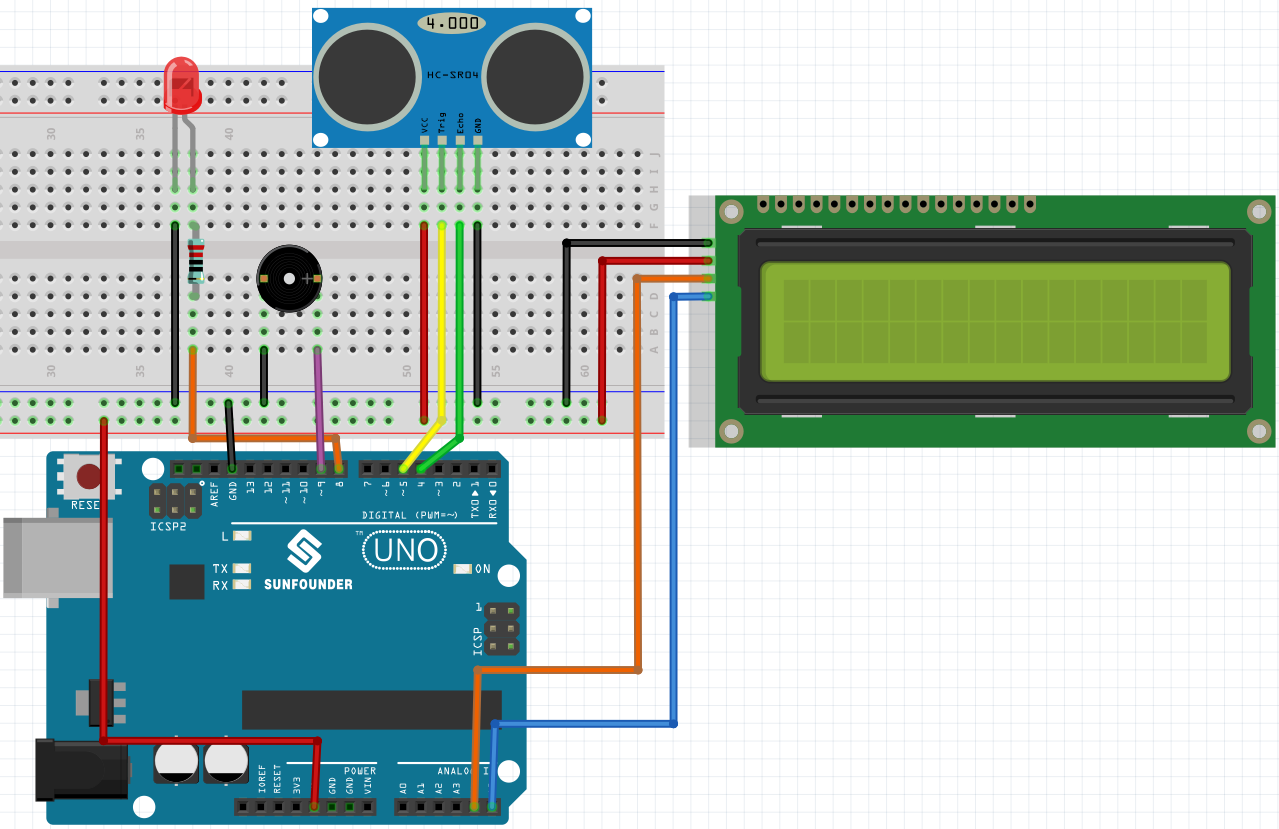
Cableado
Código
Nota
Puedes abrir directamente el archivo
6.4_reversingAid.inoen la ruta3in1-kit\basic_project\6.4_reversingAid.O copia este código en Arduino IDE.
Aquí se utiliza la biblioteca
LiquidCrystal I2C, puedes instalarla desde el Library Manager.
Después de que el código se haya cargado con éxito, la distancia detectada actual se mostrará en el LCD. Luego, el zumbador cambiará la frecuencia de sonido según las diferentes distancias.
Nota
Si el código y la conexión están bien, pero el LCD todavía no muestra contenido, puedes girar el potenciómetro en la parte trasera.
¿Cómo funciona?
Este código nos ayuda a crear un dispositivo sencillo de medición de distancia que puede medir la distancia entre objetos y proporcionar retroalimentación a través de una pantalla LCD y un zumbador.
La función loop() contiene la lógica principal del programa y se ejecuta continuamente. Vamos a echar un vistazo más de cerca a la función loop().
Bucle para leer la distancia y actualizar parámetros
En el
loop, el código primero lee la distancia medida por el módulo ultrasónico y actualiza el parámetro de intervalo basado en la distancia.// Update the distance distance = readDistance(); // Update intervals based on distance if (distance <= 10) { intervals = 300; } else if (distance <= 20) { intervals = 500; } else if (distance <= 50) { intervals = 1000; } else { intervals = 2000; }
Verificar si es momento de pitar
El código calcula la diferencia entre el tiempo actual y el último pitido, y si la diferencia es mayor o igual al tiempo del intervalo, activa el zumbador y actualiza el tiempo del último pitido.
unsigned long currentMillis = millis(); if (currentMillis - previousMillis >= intervals) { Serial.println("Beeping!"); beep(); previousMillis = currentMillis; }
Actualizar pantalla LCD
El código limpia la pantalla LCD y luego muestra «Dis:» y la distancia actual en centímetros en la primera línea.
lcd.clear(); lcd.setCursor(0, 0); lcd.print("Dis: "); lcd.print(distance); lcd.print(" cm"); delay(100);