Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
5.5 Interne Bibliothek nutzen¶
In der Arduino IDE können Sie viele integrierte Bibliotheken nutzen, indem Sie die entsprechende .h-Datei direkt in Ihren Code einfügen.
In diesem Projekt wird die Bibliothek Servo verwendet, um den Servo anzusteuern, sodass er sich zwischen 0° und 180° drehen kann.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Sie können diese auch separat über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
Schaltplan
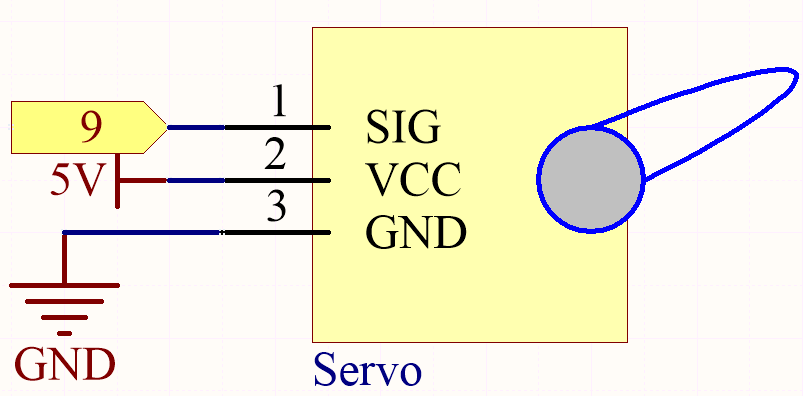
In diesem Projekt verwenden wir den PWM-Pin 9, um den Servo anzusteuern. Das orangefarbene Kabel des Servos wird mit dem PWM-Pin 9, das rote mit 5V und das braune mit GND verbunden.
Verdrahtung

Code
Bemerkung
Öffnen Sie die Datei
5.5.use_internal_library.inoim Pfad3in1-kit\learning_project\5.5.use_internal_library.Oder kopieren Sie diesen Code in die Arduino IDE.
Nachdem Sie die Codes erfolgreich auf das R4-Board hochgeladen haben, sehen Sie den Servo-Arm im Bereich von 0° bis 180° rotieren.
Wie funktioniert das?
Mit dem Aufruf der Bibliothek Servo.h können Sie den Servo einfach steuern.
#include <Servo.h>
Bibliotheksfunktionen:
Servo
Erstellt ein Servo-Objekt zur Steuerung eines Servos.
uint8_t attach(int pin);
Ruft pinMode() auf, um einen Pin in einen Servo-Treiber zu verwandeln und gibt bei einem Fehler 0 zurück.
void detach();
Löst einen Pin vom Servo-Treiben.
void write(int value);
Stellt den Winkel des Servos in Grad ein, von 0 bis 180.
int read();
Gibt den Wert zurück, der mit dem letzten write() eingestellt wurde.
bool attached();
Gibt 1 zurück, wenn der Servo derzeit angehängt ist.