Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
5.3 Zustandsänderungserkennung¶
Wenn der Knopf andere Geräte steuert, kann er nicht nur arbeiten, wenn er gedrückt wird, sondern auch stoppen, wenn er losgelassen wird. Es ist auch möglich, den Arbeitszustand jedes Mal umzuschalten, wenn der Knopf gedrückt wird.
Um diesen Effekt zu erzielen, müssen Sie wissen, wie Sie den Arbeitszustand zwischen Aus und Ein umschalten können, wenn der Knopf gedrückt wird. Das nennt man „Zustandsänderungserkennung“.
In diesem Projekt werden wir den Knopf verwenden, um den Motor zu steuern.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
- |
|
- |
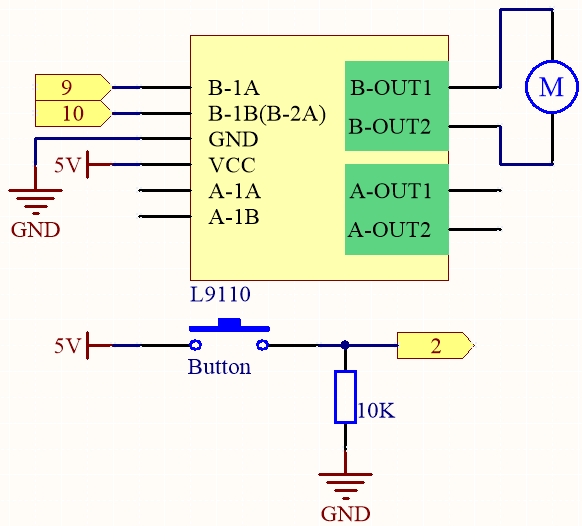
Schaltplan
Verdrahtung

Code
Bemerkung
Öffnen Sie die Datei
5.3.state_change_detection.inoim Pfad3in1-kit\learning_project\5.3.state_change_detection.Oder kopieren Sie diesen Code in die Arduino IDE.
Nachdem der Code erfolgreich hochgeladen wurde, drücken Sie den Knopf und der Motor wird sich drehen; bis Sie den Knopf erneut drücken, wird der Motor stoppen.
Wie funktioniert das?
Erstellen Sie Variablen und definieren Sie Pins für den Motor und den Knopf.
... int detectionState = 0; int buttonState = 0; int lastButtonState = 0;
detectionStateist eine Flagge, deren Wert sich jedes Mal ändert, wenn der Knopf gedrückt wird, z.B. 0 dieses Mal, 1 das nächste Mal und so weiter abwechselnd.buttonStateundlastButtonStatewerden verwendet, um den Zustand des Knopfes dieses Mal und das letzte Mal aufzuzeichnen, um zu vergleichen, ob der Knopf gedrückt oder losgelassen wurde.
Initialisieren Sie jeden Pin und setzen Sie die Baudrate des seriellen Monitors.
void setup() { pinMode(buttonPin, INPUT); Serial.begin(9600); pinMode(A_1A,OUTPUT); pinMode(A_1B,OUTPUT); }
Zuerst lesen Sie den Zustand des Knopfes, und wenn der Knopf gedrückt ist, wird die Variable
detectionStateihren Wert von 0 auf 1 oder von 1 auf 0 umschalten. WenndetectionState1 ist, wird der Motor eingeschaltet. Es hat die Wirkung, dass dieses Mal, wenn der Knopf gedrückt wird, der Motor sich dreht, das nächste Mal, wenn der Knopf gedrückt wird, der Motor stoppt und so weiter abwechselnd.void loop() { // Toggle the detectionState each time the button is pressed buttonState = digitalRead(buttonPin); if (buttonState != lastButtonState) { if (buttonState == HIGH) { detectionState=(detectionState+1)%2; Serial.print("The detection state is: "); Serial.println(detectionState); } delay(50); } lastButtonState = buttonState; // According to the detectionState, start the motor if(detectionState==1){ digitalWrite(A_1A,HIGH); digitalWrite(A_1B,LOW); }else{ digitalWrite(A_1A,LOW); digitalWrite(A_1B,LOW); } }
Der gesamte Arbeitsablauf ist wie folgt.
Lesen Sie den Knopfwert.
buttonState = digitalRead(buttonPin);
Wenn
buttonStateundlastButtonStatenicht gleich sind, bedeutet dies, dass sich der Knopfzustand geändert hat. Fahren Sie mit der nächsten Beurteilung fort und speichern Sie den Knopfzustand zu diesem Zeitpunkt in die VariablelastButtonState.delay(50)wird verwendet, um das Prellen zu eliminieren.
if (buttonState != lastButtonState) { ... delay(50); } lastButtonState = buttonState;
Wenn der Knopf gedrückt wird, ist sein Wert HIGH. Hier, wenn der Knopf gedrückt wird, wird der Wert der Variable
detectionStategeändert, z.B. von 0 auf 1 nach einer Operation.
if (buttonState == HIGH) { detectionState=(detectionState+1)%2; Serial.print("The detection state is: "); Serial.println(detectionState); }
Wenn die Variable
detectionState1 ist, lassen Sie den Motor drehen, sonst stoppen Sie ihn.
if(detectionState==1){ digitalWrite(A_1A,HIGH); digitalWrite(A_1B,LOW); }else{ digitalWrite(A_1A,LOW); digitalWrite(A_1B,LOW); }