Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
3.1.4 Ventilateur Intelligent
Note
Selon la version de votre kit, identifiez si vous disposez d’un ADC0834 ou d’un MCP3008 et suivez la section correspondante.
Introduction
Dans ce projet, nous allons utiliser des moteurs, des boutons et des thermistances pour fabriquer un ventilateur intelligent manuel + automatique dont la vitesse du vent est réglable.
Composants Nécessaires
Dans ce projet, nous avons besoin des composants suivants.
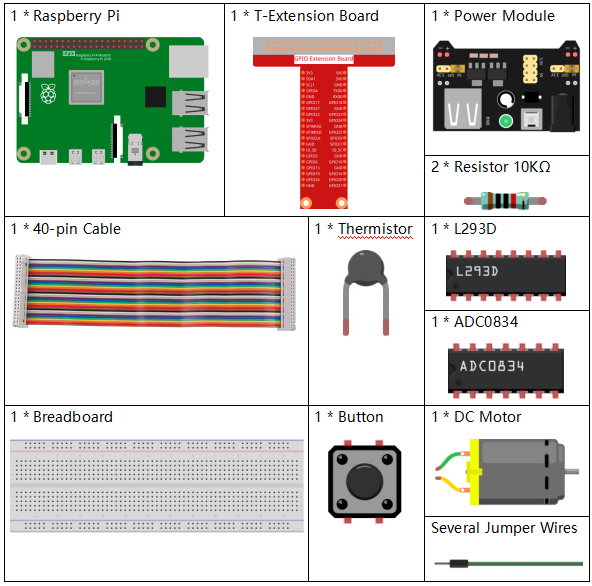
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
|
- |
|
- |
|
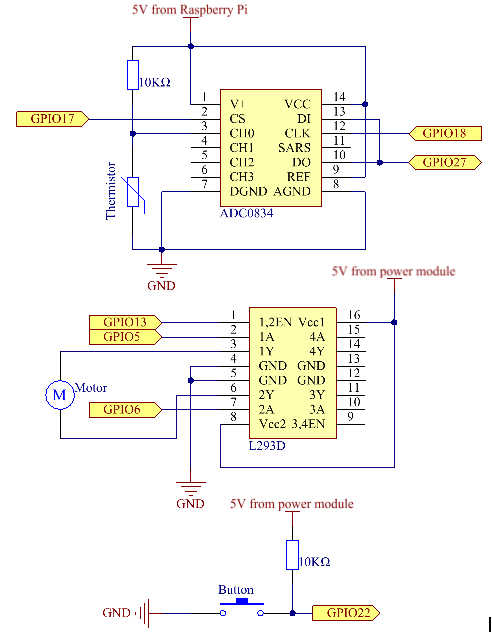
Schéma de Câblage
Nom T-Board |
physique |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procédures Expérimentales
Étape 1 : Construire le circuit.
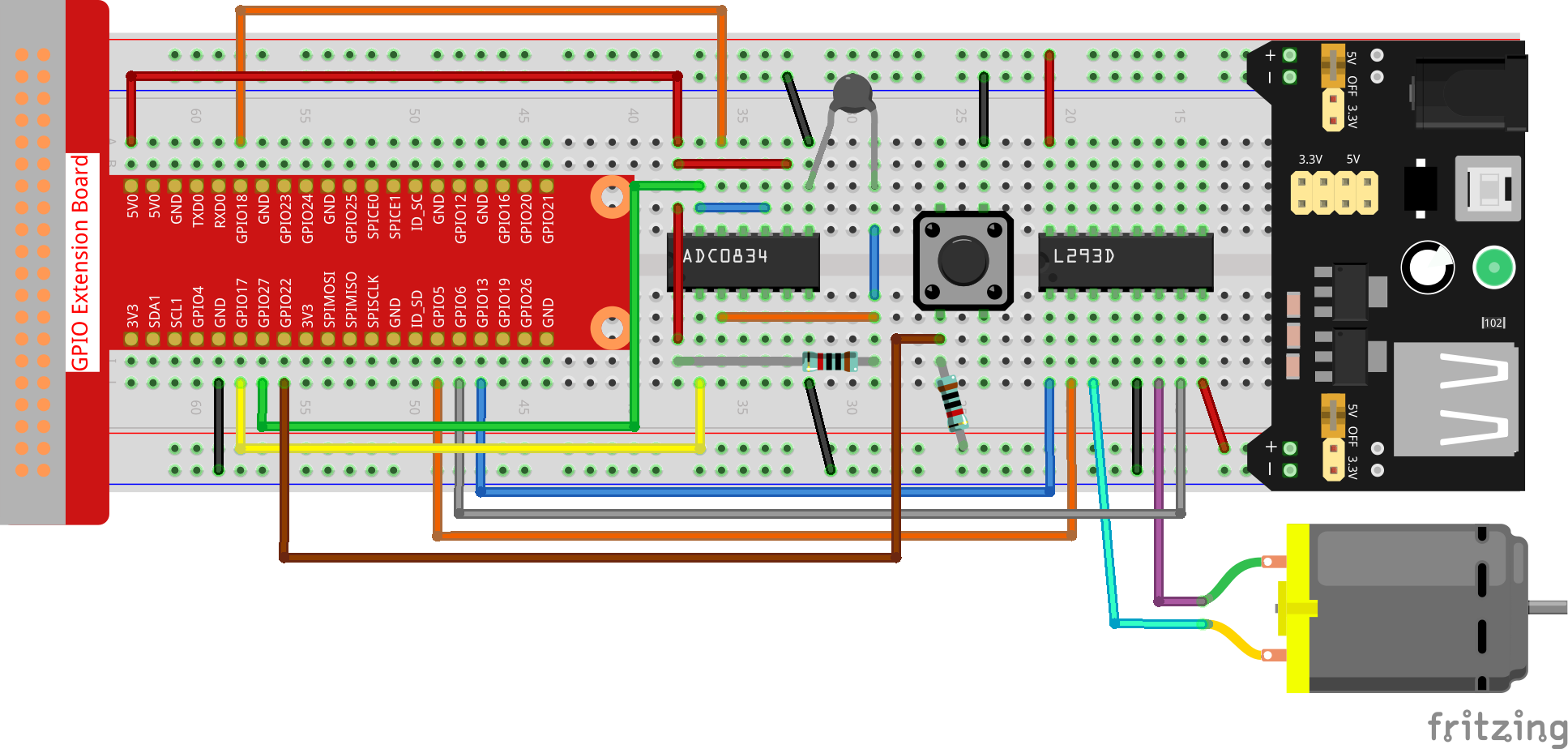
Note
- Le module d’alimentation peut utiliser une batterie de 9V avec la boucle de batterie de 9V dans
le kit. Insérez le capuchon du module d’alimentation dans les bandes de bus de 5V de la planche à pain.

Étape 2 : Accédez au dossier du code.
cd ~/raphael-kit/c/3.1.4/
Étape 3 : Compiler.
gcc 3.1.4_SmartFan.c -lwiringPi -lm
Étape 4 : Exécuter le fichier exécutable ci-dessus.
sudo ./a.out
Lorsque le code s’exécute, démarrez le ventilateur en appuyant sur le bouton. Chaque fois que vous appuyez, une vitesse est ajustée vers le haut ou vers le bas. Il y a 5 niveaux de vitesse : 0~4. Lorsqu’il est réglé sur le 4ème niveau de vitesse et que vous appuyez sur le bouton, le ventilateur s’arrête de fonctionner avec une vitesse de vent de 0.
Une fois que la température augmente ou diminue de plus de 2℃, la vitesse augmente ou diminue automatiquement d’un niveau.
Note
Si cela ne fonctionne pas après l’exécution, ou s’il y a un message d’erreur : "wiringPi.h: No such file or directory", veuillez vous référer à Installer et vérifier WiringPi.
Code
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
#include <math.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define MotorPin1 21
#define MotorPin2 22
#define MotorEnable 23
#define BtnPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
void setup(){
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable,OUTPUT);
pinMode(BtnPin,INPUT);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
}
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
Code Explanation
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
La fonction temperture() convertit les valeurs du thermistor lues par l’ADC0834 en valeurs de température. Consultez 2.2.2 Thermistance pour plus de détails.
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
Cette fonction contrôle la vitesse de rotation du moteur. La plage de niveaux est de 0-4 (le niveau 0 arrête le moteur). Chaque niveau représente un changement de 25 % de la vitesse du vent.
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
La fonction main() contient l’ensemble du processus du programme comme suit :
Lire constamment l’état du bouton et la température actuelle.
Chaque pression fait augmenter le niveau de +1, en même temps, la température est mise à jour. Le niveau varie de 1~4.
Lorsque le ventilateur fonctionne (le niveau n’est pas 0), la température est sous surveillance. Un changement de 2℃ ou plus provoque l’augmentation ou la diminution du niveau.
Le moteur change la vitesse de rotation en fonction du niveau.