Bemerkung
Hallo und herzlich willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche mit Gleichgesinnten tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Erhalte Hilfe von unserer Community und unserem Team bei technischen Herausforderungen und Support-Anfragen nach dem Kauf.
Lernen & Teilen: Tausche Tipps und Anleitungen aus, um deine Fähigkeiten zu erweitern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Profitiere von exklusiven Vergünstigungen auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Verlosungen und saisonalen Sonderaktionen teil.
👉 Bereit, mit uns zu entdecken und zu kreieren? Klicke auf [hier] und tritt noch heute bei!
7.4 Bau eines Passagierzählers
In dieser Lektion erstellen wir einen Passagierzähler mit einem Raspberry Pi Pico 2 W, einem PIR-Bewegungssensor (Passive Infrared) und einem 4-stelligen 7-Segment-Display. Dieses Gerät zählt die Anzahl der vom PIR-Sensor erkannten Bewegungen und zeigt die Gesamtzahl auf dem Display an. Es simuliert die Funktionsweise von Zählern, die in öffentlichen Bereichen zur Überwachung des Fußgängerverkehrs verwendet werden.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Bauteile.
Es ist praktisch, ein komplettes Kit zu kaufen. Hier ist der Link:
Name |
ENTHALTENE TEILE |
LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Alternativ können die Komponenten auch einzeln über die folgenden Links erworben werden.
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
4 (220Ω) |
||
6 |
1 |
||
7 |
1 |
||
8 |
1 |
Funktionsweise der Komponenten
PIR-Bewegungssensor: Erkennt Bewegungen durch Messung der Infrarotstrahlung (IR) von Objekten in seinem Sichtfeld. Sobald Bewegung erkannt wird, gibt er ein HIGH-Signal aus.
4-stelliges 7-Segment-Display: Ermöglicht die Anzeige von Zahlen zwischen 0000 und 9999. Mithilfe eines Schieberegisters steuern wir das Display mit weniger GPIO-Pins.
74HC595 Schieberegister: Ein 8-Bit-Schieberegister mit serieller Eingabe und paralleler Ausgabe. Es ermöglicht die Steuerung mehrerer Ausgänge mit wenigen GPIO-Pins.
Schaltplan
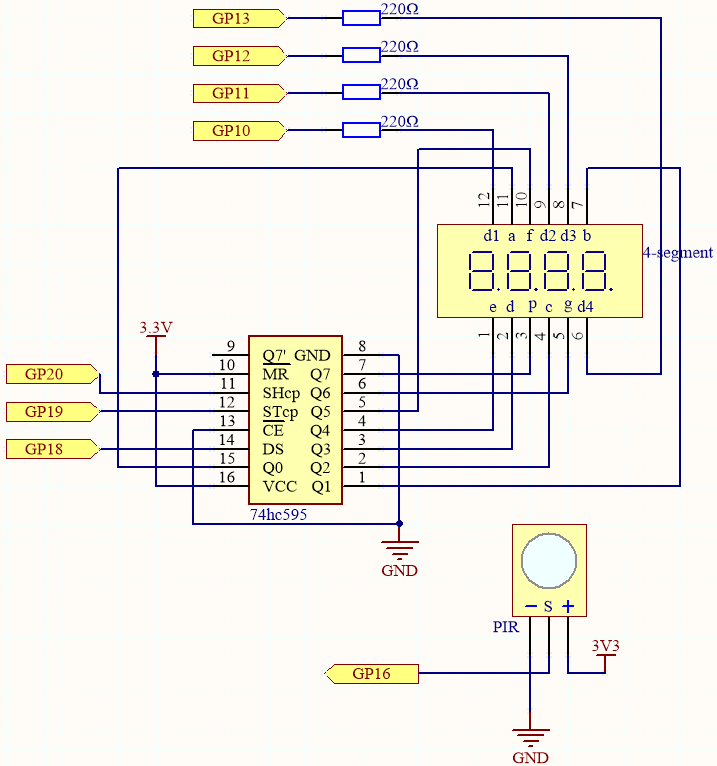
Diese Schaltung basiert auf der 5.3 Zeitmesser mit der Ergänzung eines PIR-Moduls.
Der PIR-Sensor gibt bei erkannter Bewegung ein ca. 2,8 Sekunden langes HIGH-Signal aus.
Das PIR-Modul verfügt über zwei Potentiometer: eines zur Einstellung der Empfindlichkeit, das andere zur Anpassung der Erkennungsreichweite. Um die beste Leistung zu erzielen, sollten beide Potentiometer gegen den Uhrzeigersinn bis zum Anschlag gedreht werden.

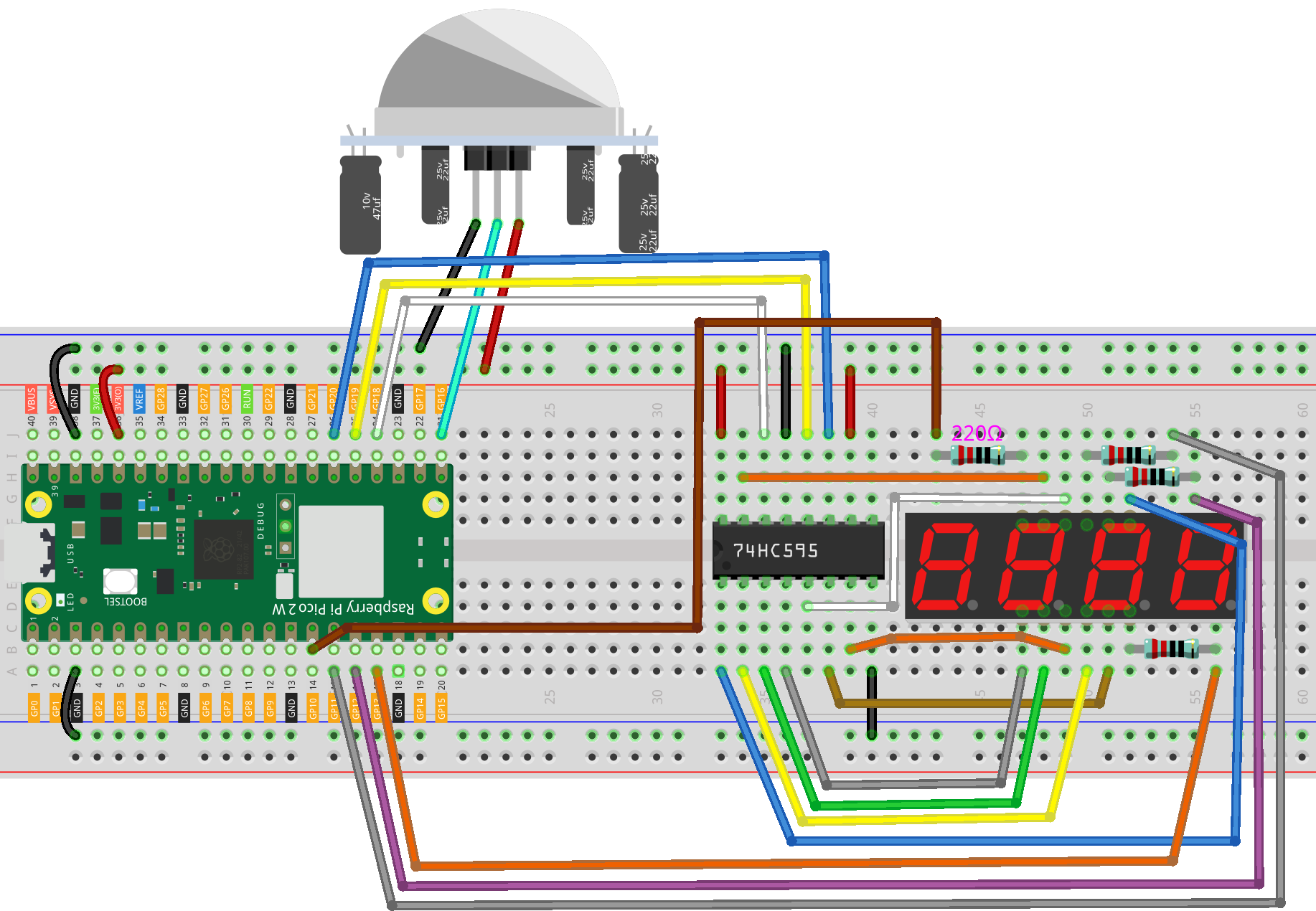
Verdrahtung
Code schreiben
Unser MicroPython-Skript wird:
Bewegungen mit dem PIR-Sensor erkennen.
Bei jeder Bewegung den Zähler um eins erhöhen.
Die aktuelle Zählung auf dem 4-stelligen 7-Segment-Display anzeigen.
Multiplexing-Techniken verwenden, um das Display effizient zu steuern.
Bemerkung
Öffne die Datei
7.4_passager_counter.pyim Verzeichnispico-2w-kit-main/micropythonoder kopiere den folgenden Code in Thonny. Klicke dann auf „Run“ oder drücke F5, um es auszuführen.Stelle sicher, dass unten rechts in Thonny der Interpreter „MicroPython (Raspberry Pi Pico).COMxx“ ausgewählt ist.
from machine import Pin
import utime
# PIR-Sensor-Pin definieren
pir_sensor = Pin(16, Pin.IN)
# Zähler initialisieren
count = 0
# Binärcodes für die Anzeige der Ziffern 0-9
SEGMENT_CODES = [
0x3F, # 0
0x06, # 1
0x5B, # 2
0x4F, # 3
0x66, # 4
0x6D, # 5
0x7D, # 6
0x07, # 7
0x7F, # 8
0x6F # 9
]
# Initialisierung der Steuerpins für 74HC595
SDI = machine.Pin(18, machine.Pin.OUT) # Serielle Dateneingabe (DS)
RCLK = machine.Pin(19, machine.Pin.OUT) # Register-Takt (STCP)
SRCLK = machine.Pin(20, machine.Pin.OUT) # Schieberegister-Takt (SHCP)
# Initialisierung der Digit-Auswahlpins (gemeinsame Kathoden)
digit_pins = [
machine.Pin(10, machine.Pin.OUT), # Ziffer 1
machine.Pin(11, machine.Pin.OUT), # Ziffer 2
machine.Pin(12, machine.Pin.OUT), # Ziffer 3
machine.Pin(13, machine.Pin.OUT) # Ziffer 4
]
# Funktion zum Senden von Daten an 74HC595
def shift_out(data):
RCLK.low()
for bit in range(7, -1, -1):
SRCLK.low()
bit_val = (data >> bit) & 0x01
SDI.value(bit_val)
SRCLK.high()
RCLK.high()
# Funktion zur Anzeige einer Ziffer an einer bestimmten Position
def display_digit(position, digit):
# Alle Ziffern deaktivieren
for dp in digit_pins:
dp.high()
# Segmentdaten senden
shift_out(SEGMENT_CODES[digit])
# Aktivieren der ausgewählten Ziffer (gemeinsame Kathode ist aktiv niedrig)
digit_pins[position].low()
# Kleine Verzögerung für die Sichtbarkeit der Ziffer
utime.sleep_ms(5)
# Ziffer deaktivieren
digit_pins[position].high()
# Funktion zur Anzeige einer Zahl auf dem 4-stelligen Display
def display_number(number):
# Einzelne Ziffern extrahieren
digits = [
(number // 1000) % 10,
(number // 100) % 10,
(number // 10) % 10,
number % 10
]
# Jede Ziffer schnell nacheinander anzeigen
for i in range(4):
display_digit(i, digits[i])
# Interrupt-Handler für den PIR-Sensor
def pir_handler(pin):
global count
count += 1
if count > 9999:
count = 0
# PIR-Sensor-Interrupt einrichten
pir_sensor.irq(trigger=Pin.IRQ_RISING, handler=pir_handler)
# Hauptschleife
while True:
# Anzeige kontinuierlich aktualisieren
display_number(count)
Wenn das Skript läuft, sollte das 7-Segment-Display initialisiert werden und „0000“ anzeigen. Bewege dich vor dem PIR-Sensor. Die angezeigte Zahl sollte sich jedes Mal um eins erhöhen, wenn eine Bewegung erkannt wird. Erreicht der Zähler 9999, wird er auf 0000 zurückgesetzt.
Den Code verstehen
Importe und Pin-Definitionen:
machine.Pin: Zur Steuerung der GPIO-Pins.utime: Für Zeitfunktionen.Definition der Steuerpins SDI, SRCLK und RCLK für das Schieberegister.
Definition von
pir_sensorauf GP16 als Eingangspin für den PIR-Sensor.
Segment-Codes:
SEGMENT_CODES: Eine Liste mit den Binärcodes für die Anzeige der Ziffern 0-9 auf einem 7-Segment-Display. Jeder Bytewert bestimmt, welche Segmente leuchten.
# 7-Segment-Display Codes für die Ziffern 0-9 (gemeinsame Kathode) SEGMENT_CODES = [ 0x3F, # 0 0x06, # 1 0x5B, # 2 0x4F, # 3 0x66, # 4 0x6D, # 5 0x7D, # 6 0x07, # 7 0x7F, # 8 0x6F # 9 ]
Zähler-Initialisierung:
count: Eine globale Variable zur Erfassung der erkannten Bewegungen.
Die Funktion
shift_outdefinieren:Sendet 8 Bit Daten an das 74HC595-Schieberegister.
Beginnt mit dem höchstwertigen Bit (MSB).
Pulsiert die Schiebe- und Registertaktsignale korrekt.
def shift_out(data): RCLK.low() for bit in range(7, -1, -1): SRCLK.low() bit_val = (data >> bit) & 0x01 SDI.value(bit_val) SRCLK.high() RCLK.high()
Die Funktion
display_digitdefinieren:Deaktiviert alle Ziffern.
Sendet die Segmentdaten der gewünschten Ziffer.
Aktiviert die gewählte Ziffer, indem ihr Pin auf LOW gesetzt wird.
Fügt eine kurze Verzögerung hinzu, um die Ziffer sichtbar zu machen.
Deaktiviert die Ziffer danach wieder.
def display_digit(position, digit): for dp in digit_pins: dp.high() shift_out(SEGMENT_CODES[digit]) digit_pins[position].low() utime.sleep_ms(5) digit_pins[position].high()
Die Funktion
display_numberdefinieren:Extrahiert die einzelnen Ziffern einer Zahl.
Ruft
display_digitfür jede Ziffer schnell auf, um den Multiplexing-Effekt zu erzeugen.
def display_number(number): # Einzelne Ziffern extrahieren digits = [ (number // 1000) % 10, (number // 100) % 10, (number // 10) % 10, number % 10 ] # Jede Ziffer schnell nacheinander anzeigen for i in range(4): display_digit(i, digits[i])
PIR-Interrupt-Handler:
pir_handler: Diese Funktion wird automatisch aufgerufen, wenn der PIR-Sensor eine Bewegung erkennt.Erhöht die count-Variable.
Setzt count auf 0 zurück, falls der Wert 9999 überschreitet.
def pir_handler(pin): global count count += 1 if count > 9999: count = 0
PIR-Sensor-Interrupt einrichten:
pir_sensor.irq: Legt eine Unterbrechung fest, umpir_handlerbei einem steigenden Signal vom PIR-Sensor auszulösen.pir_sensor.irq(trigger=Pin.IRQ_RISING, handler=pir_handler)
Hauptschleife:
Ruft kontinuierlich
display_number(count)auf, um das Display mit der aktuellen Zählung zu aktualisieren.while True: display_number(count)
Fehlersuche
Anzeigeprobleme:
Falls die Anzeige falsche Zahlen zeigt, überprüfe die Segmentcodes und die Verdrahtung.
Stelle sicher, dass das Schieberegister korrekt angeschlossen ist und Daten richtig ausgegeben werden.
Empfindlichkeit des PIR-Sensors:
Der PIR-Sensor kann mit Potentiometern für Empfindlichkeit und Verzögerung eingestellt werden.
Justiere diese Parameter, um die Bewegungserkennung zu optimieren.
Beachte, dass der PIR-Sensor eine kurze Verzögerung nach der Bewegungserkennung haben kann.
Genauigkeit der Zählung:
In Umgebungen mit viel Bewegung kann der Zähler schnell hochzählen.
Erwäge eine Entprellung des PIR-Sensors oder begrenze die Zählfrequenz.
Erweiterungen und Verbesserungen
Reset-Taste:
Eine zusätzliche Taste hinzufügen, um den Zähler manuell auf 0 zu setzen.
Bidirektionale Zählung:
Zwei PIR-Sensoren zur Erkennung der Bewegungsrichtung (Eintritt/Austritt) nutzen.
Datenprotokollierung:
Speichere die Daten lokal oder sende sie an einen Server für Analysen.
LCD-Anzeige:
Ersetze das 7-Segment-Display durch ein LCD für mehr Informationen.
Netzwerkanbindung:
Daten über WLAN an eine Cloud oder ein Dashboard senden.
Fazit
Dieses Projekt zeigt, wie man einen Passagierzähler mit dem Raspberry Pi Pico 2 W, einem PIR-Sensor und einem 7-Segment-Display realisiert. Du kannst es als Grundlage für weiterführende Anwendungen nutzen.