Nota
Ciao, benvenuto nella Community SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto Esperti: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato ai nuovi annunci di prodotti e alle anteprime.
Sconti Speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
2.6 Inclinazione!

L’interruttore di inclinazione è un dispositivo a 2 pin con una sfera di metallo al centro. Quando l’interruttore è in posizione verticale, i due pin sono collegati; quando è inclinato, i due pin sono scollegati.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link sottostanti.
SN |
COMPONENTE |
QUANTITÀ |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1(10KΩ) |
||
6 |
1 |
Schema
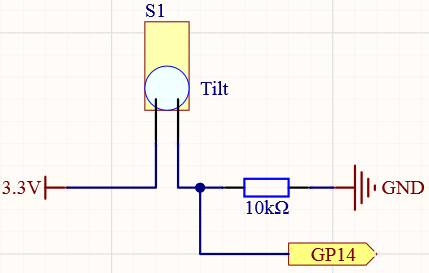
Quando è in posizione verticale, GP14 sarà alto; una volta inclinato, GP14 sarà basso.
Il resistore da 10K serve a mantenere GP14 in uno stato basso stabile quando l’interruttore di inclinazione è inclinato.
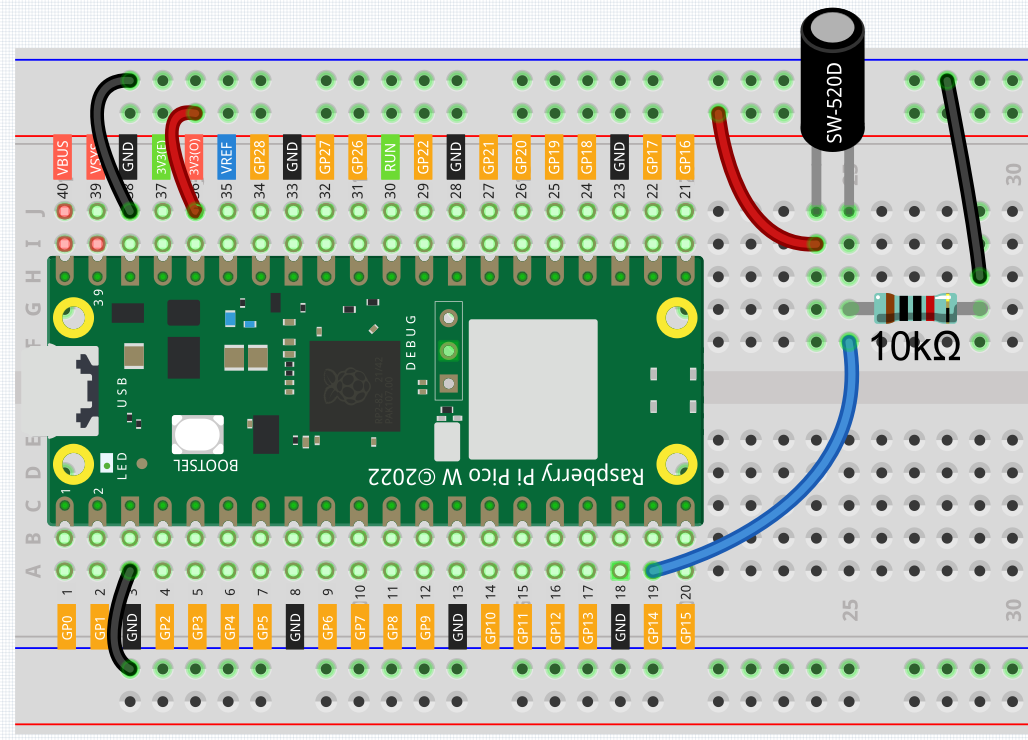
Collegamenti
Codice
Nota
Apri il file
2.6_tilt_switch.pynel percorsokepler-kit-main/micropythono copia questo codice in Thonny, poi clicca su «Esegui Script Corrente» o semplicemente premi F5 per eseguirlo.Non dimenticare di selezionare l’interprete «MicroPython (Raspberry Pi Pico)» nell’angolo in basso a destra.
Per tutorial dettagliati, fai riferimento a Aprire ed Eseguire Codice Direttamente.
import machine
import utime
button = machine.Pin(14, machine.Pin.IN)
while True:
if button.value() == 0:
print("The switch works!")
utime.sleep(1)
Dopo l’esecuzione del programma, quando inclini la breadboard (interruttore di inclinazione), nel terminale apparirà «L’interruttore funziona!».