Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto da Esperti: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime esclusive.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
3.6 Pompare
Le piccole pompe centrifughe sono ideali per progetti di irrigazione automatica delle piante. Possono anche essere utilizzate per creare piccoli giochi d’acqua intelligenti.
Il componente di potenza è un motore elettrico, pilotato esattamente come un normale motore.
Nota
Collega il tubo all’uscita del motore, immergi la pompa nell’acqua e poi accendila.
Devi assicurarti che il livello dell’acqua sia sempre superiore al motore. Il funzionamento a vuoto può danneggiare il motore a causa della generazione di calore e generare rumore.
Se stai annaffiando le piante, evita che il terreno venga aspirato, poiché potrebbe ostruire la pompa.
Se l’acqua non esce dal tubo, potrebbe esserci dell’acqua residua nel tubo che blocca il flusso d’aria e deve essere drenata prima.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link sottostanti.
SN |
COMPONENTE |
QUANTITÀ |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1 |
||
6 |
1 |
||
7 |
Power Pack |
1 |
|
8 |
Porta Batteria |
1 |
|
9 |
1 |
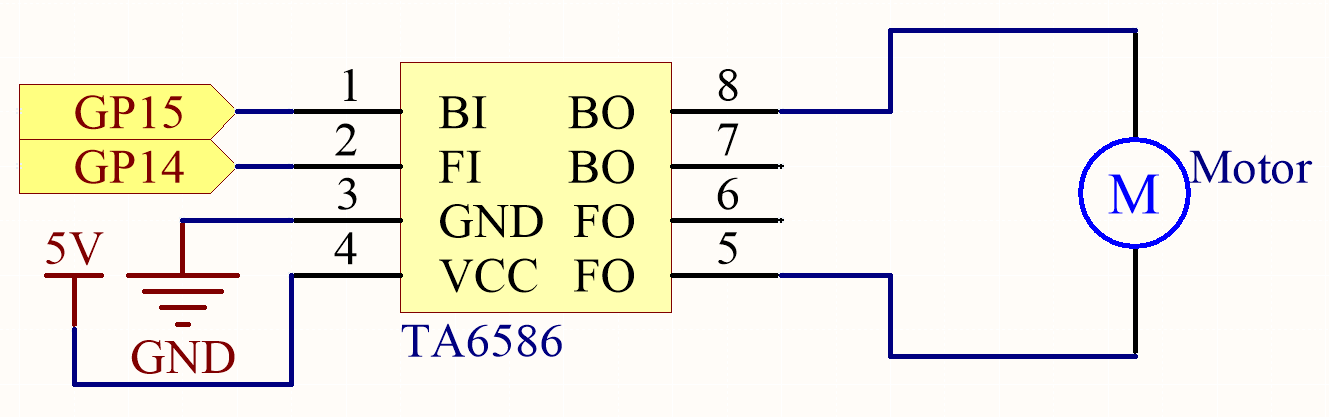
Schema Elettrico
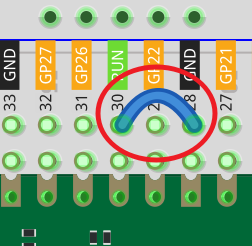
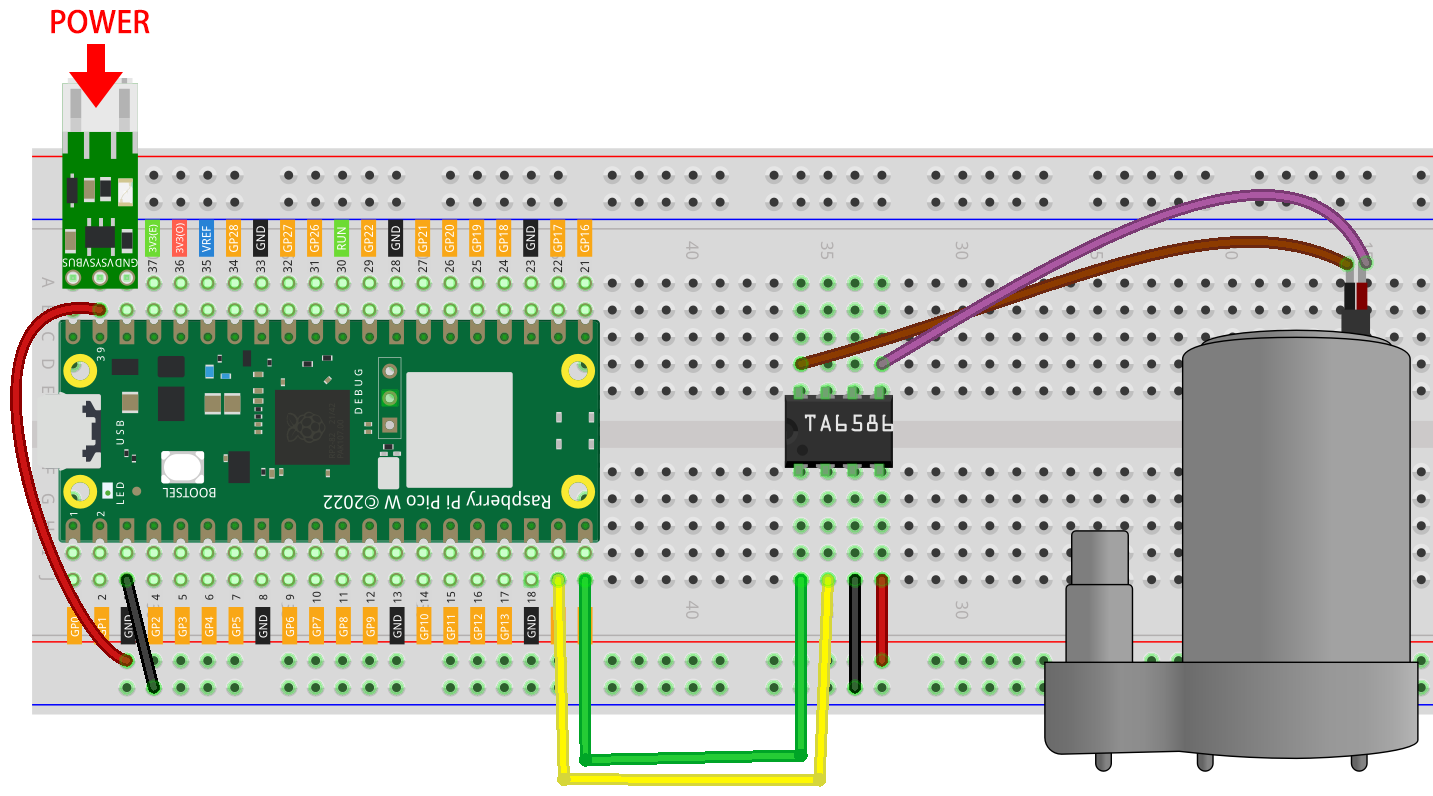
Collegamenti
Nota
Poiché la pompa richiede una corrente elevata, utilizziamo un modulo caricatore Li-po per alimentare il motore per motivi di sicurezza.
Assicurati che il tuo modulo caricatore Li-po sia collegato come mostrato nel diagramma. In caso contrario, un cortocircuito potrebbe danneggiare la batteria e il circuito.
Codice
Nota
Apri il file
3.6_pumping.pynel percorsokepler-kit-main/micropythono copia questo codice in Thonny, poi clicca su «Esegui Script Corrente» o semplicemente premi F5 per eseguirlo.Non dimenticare di selezionare l’interprete «MicroPython (Raspberry Pi Pico)» nell’angolo in basso a destra.
Per tutorial dettagliati, fai riferimento a Aprire ed Eseguire Codice Direttamente.
import machine
import utime
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
while True:
motor1A.high()
motor2A.low()
Dopo l’esecuzione del codice, la pompa inizierà a funzionare e vedrai l’acqua uscire dal tubo allo stesso tempo.
Nota
Se il motore continua a girare dopo aver cliccato sul pulsante Stop, devi resettare il pin RUN sul Pico W con un filo collegato a GND, e poi scollegare questo filo per eseguire nuovamente il codice.
Questo perché il motore sta operando con una corrente troppo elevata, il che potrebbe causare la disconnessione del Pico W dal computer.