注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ ここ]をクリックして今すぐ参加しましょう!
スマートゴミ箱
これは、スマートゴミ箱を制御するために設計されたArduinoのコードです。 物体がゴミ箱の前面20センチメートル以内にあると、その蓋が自動的に開きます。 このプロジェクトでは、SG90サーボモーターとHC-SR04超音波距離センサーを利用しています。
必要なコンポーネント
このプロジェクトには以下のコンポーネントが必要です。
全体のキットを購入すると便利です。こちらがリンクです:
名称 |
このキットのアイテム数 |
リンク |
|---|---|---|
Elite Explorer Kit |
300+ |
以下のリンクから別々に購入することもできます。
コンポーネント紹介 |
購入リンク |
|---|---|
- |
|
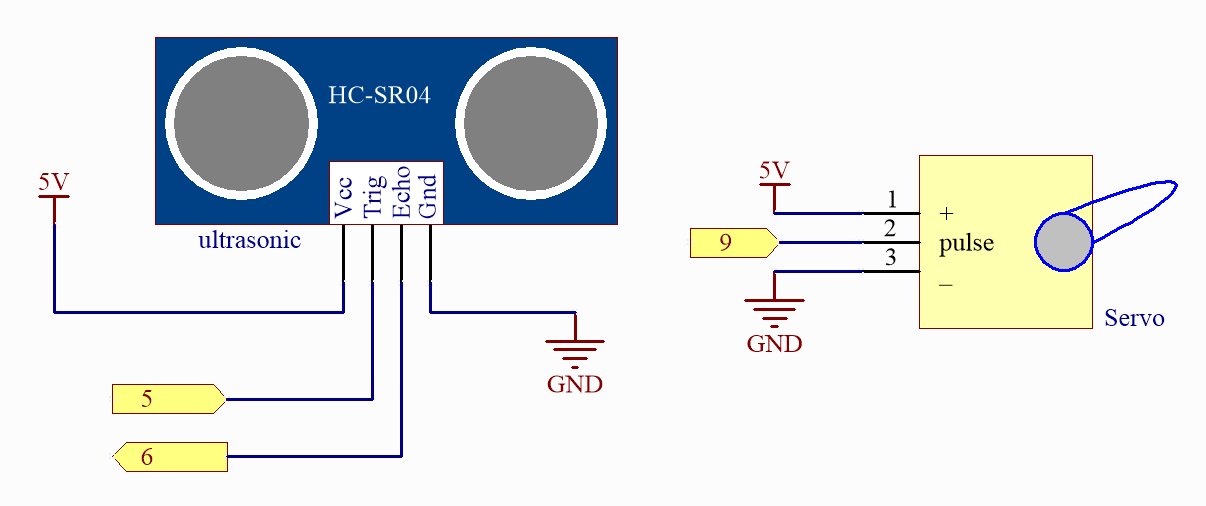
配線図

回路図
コード
注釈
ファイル
07_smart_trash_can.inoをelite-explorer-kit-main\fun_project\07_smart_trash_canのパスから直接開くことができます。または、このコードをArduino IDEにコピーしてください。
1/*
2 This is an Arduino code for a smart trash can that automatically opens its lid when an object comes within 30cm of it.
3
4 This Arduino code controls an SG90 servo motor based on readings from an ultrasonic distance sensor.
5 The distance is measured three times, and the average is computed. If the averaged distance is less
6 than or equal to 20, the servo rotates to an open angle of 180 degrees; otherwise, it returns to a
7 closed position of 0 degrees after a one-second delay.
8
9 Board: Arduino Uno R4 (or R3)
10 Component: Servo motor and Ultrasonic distance Sensor
11*/
12
13#include <Servo.h>
14
15// Set up the servo motor parameters
16Servo servo;
17const int servoPin = 9;
18const int openAngle = 0;
19const int closeAngle = 90;
20
21// Set up the ultrasonic sensor parameters
22const int trigPin = 5;
23const int echoPin = 6;
24long distance, averageDistance;
25long averDist[3];
26
27// Distance threshold in centimeters
28const int distanceThreshold = 20;
29
30void setup() {
31 // Initialize serial communication with the computer at 9600 baud rate
32 Serial.begin(9600);
33
34 // Configure the trigger and echo pins of the ultrasonic sensor
35 pinMode(trigPin, OUTPUT);
36 pinMode(echoPin, INPUT);
37
38 // Attach the servo to its control pin and set its initial position
39 servo.attach(servoPin);
40 servo.write(closeAngle);
41 delay(100);
42 servo.detach(); // Detach the servo to save power when not in use
43}
44
45void loop() {
46 // Measure the distance three times
47 for (int i = 0; i <= 2; i++) {
48 distance = readDistance();
49 averDist[i] = distance;
50 delay(10);
51 }
52
53 // Calculate the average distance
54 averageDistance = (averDist[0] + averDist[1] + averDist[2]) / 3;
55 Serial.println(averageDistance);
56
57 // Control the servo based on the averaged distance
58 if (averageDistance <= distanceThreshold) {
59 servo.attach(servoPin); // Reattach the servo before sending a command
60 delay(1);
61 servo.write(openAngle); // Rotate the servo to the open position
62 delay(3500);
63 } else {
64 servo.write(closeAngle); // Rotate the servo back to the closed position
65 delay(1000);
66 servo.detach(); // Detach the servo to save power when not in use
67 }
68}
69
70// Function to read the sensor data and calculate the distance
71float readDistance() {
72 // Send a pulse on the trigger pin of the ultrasonic sensor
73 digitalWrite(trigPin, LOW);
74 delayMicroseconds(2);
75 digitalWrite(trigPin, HIGH);
76 delayMicroseconds(10);
77 digitalWrite(trigPin, LOW);
78
79 // Measure the pulse width of the echo pin and calculate the distance value
80 float distance = pulseIn(echoPin, HIGH) / 58.00; // Formula: (340m/s * 1us) / 2
81 return distance;
82}
どのように動作するのか?
以下はコードのステップバイステップの説明です:
ライブラリのインポートと定数/変数の定義:
SG90サーボモーターを制御するために
Servo.hライブラリをインポートします。 サーボモーター、超音波センサー、その他必要な定数や変数のパラメータを定義します。setup():コンピュータとのシリアル通信を9600ボーのボーレートで初期化します。 超音波センサーのトリガーピンとエコーピンを設定します。 サーボモーターを制御ピンに接続し、初期位置を閉じた角度に設定します。角度を設定した後、電力を節約するためにサーボモーターを取り外します。
loop():3回距離を測定し、各測定値を保存します。 3回の測定から平均距離を計算します。 平均距離が20センチメートル(定義された距離しきい値)以下の場合、サーボモーターは開角度(0度)に回転します。 それ以外の場合、1秒の遅延の後、サーボモーターは閉じた位置(90度)に戻ります。使用していないときは電力を節約するためにサーボモーターを取り外します。
readDistance():超音波センサーのトリガーピンにパルスを送信します。 エコーピンのパルス幅を測定し、距離値を計算します。 この計算では、空気中の音速を使用してパルス時間に基づいて距離を計算します。