Nota
Ciao, benvenuto nella Community su Facebook per gli appassionati di SunFounder Raspberry Pi, Arduino e ESP32! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci dei nuovi prodotti e anteprime esclusive.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e Giveaway Festivi: Partecipa a concorsi e promozioni in occasione delle festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.1.6 Controllo del Movimento
Introduzione
In questa lezione, realizzeremo un semplice dispositivo di rilevamento e controllo del movimento. L’MPU6050 sarà utilizzato come sensore e il motore passo-passo come dispositivo controllato. Montando l’MPU6050 su un guanto, potrai controllare il motore passo-passo ruotando il polso.
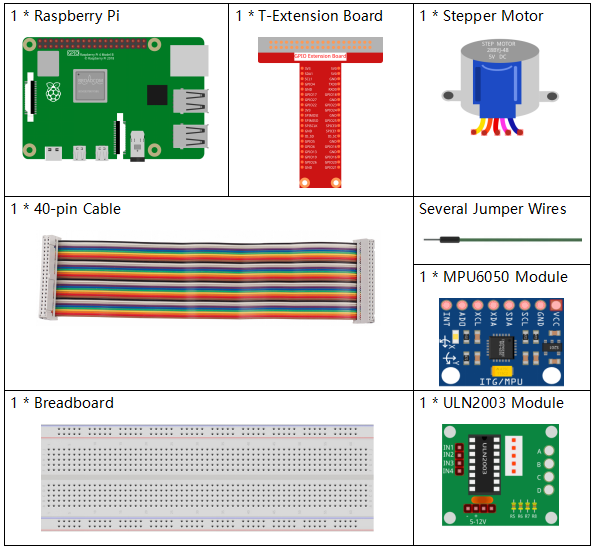
Componenti
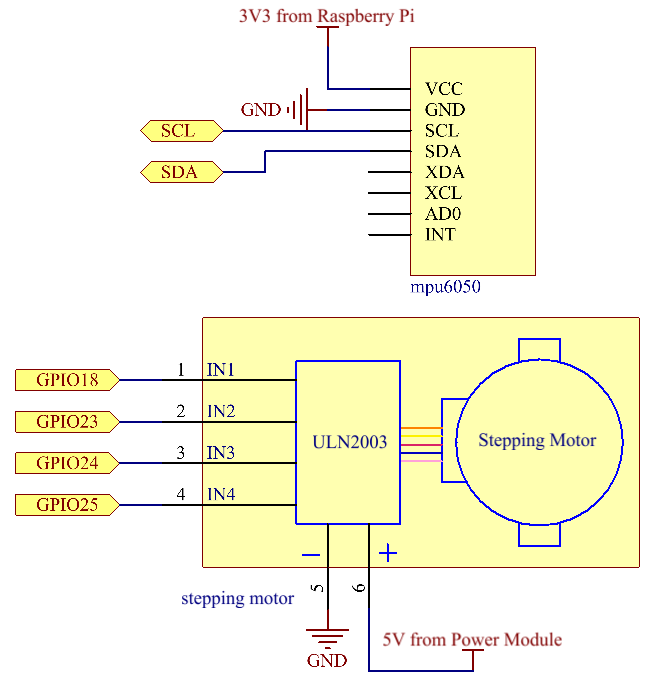
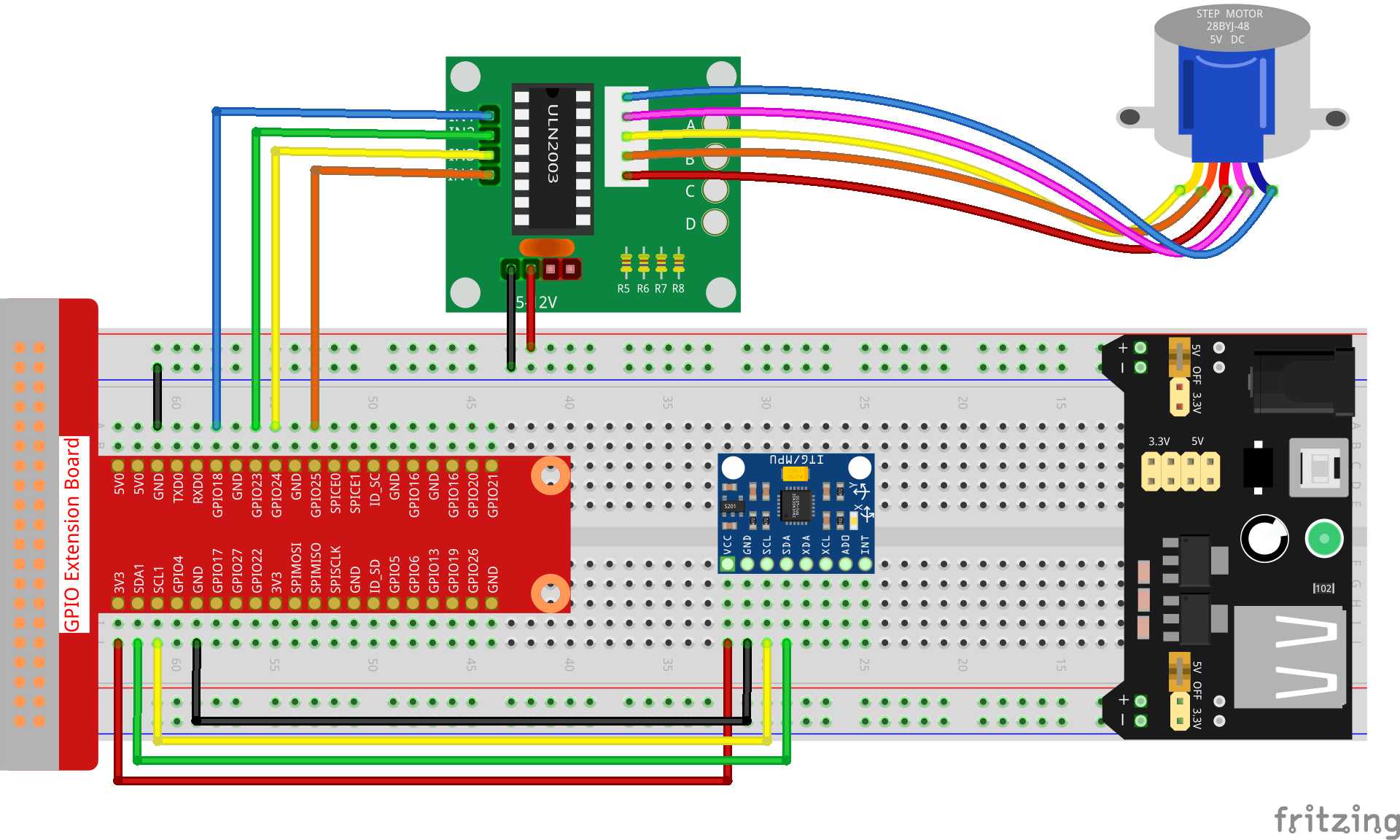
Schema di Collegamento
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO25 |
Pin 22 |
6 |
25 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Procedure Sperimentali
Passo 1: Costruisci il circuito.
Passo 2: Accedi alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.6/
Passo 3: Compila il codice.
gcc 3.1.6_MotionControl.c -lwiringPi -lm
Passo 4: Esegui il file eseguibile.
sudo ./a.out
Quando il codice è in esecuzione, se l’angolo di inclinazione di mpu6050 sull’asse Y è superiore a 45°, il motore passo-passo ruota in senso antiorario; se è inferiore a -45°, il motore ruota in senso orario.
Nota
Se non funziona dopo l’esecuzione o compare un messaggio di errore: "wiringPi.h: No such file or directory", consulta Il codice C non funziona?.
Spiegazione del Codice
double mpu6050(){
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
double angle=get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled);
return angle;
}
La funzione mpu6050 calcola l’angolo di inclinazione nella direzione dell’asse Y.
void rotary(char direction){
if(direction == 'c'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99>>j & (0x08>>i));}
delayMicroseconds(stepSpeed);
}
}
else if(direction =='a'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99<<j & (0x80>>i));}
delayMicroseconds(stepSpeed);
}
}
}
Se il tasto della direzione ricevuto è 'c', il motore passo-passo ruota in senso orario; se il tasto è 'a', il motore ruota in senso antiorario. Consulta 1.3.3 Motore Passo-passo per ulteriori dettagli sul calcolo della direzione di rotazione del motore passo-passo.
int main()
{
setup();
double angle;
while(1) {
angle = mpu6050();
if (angle >=45){rotary('a');}
else if (angle<=-45){rotary('c');}
}
return 0;
}
La funzione main() legge l’angolo di inclinazione nella direzione dell’asse Y da mpu6050 e, se è maggiore di 45°, il motore passo-passo ruota in senso antiorario; se è minore di -45°, il motore ruota in senso orario.