Nota
Ciao, benvenuto nella Community su Facebook per gli appassionati di SunFounder Raspberry Pi, Arduino e ESP32! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci dei nuovi prodotti e anteprime esclusive.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e Giveaway Festivi: Partecipa a concorsi e promozioni in occasione delle festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.1.10 Campanello di Allarme
Introduzione
In questo progetto, realizzeremo un dispositivo di allarme manuale. È possibile sostituire l’interruttore a levetta con un termistore o un sensore di luce per creare un allarme di temperatura o di luminosità.
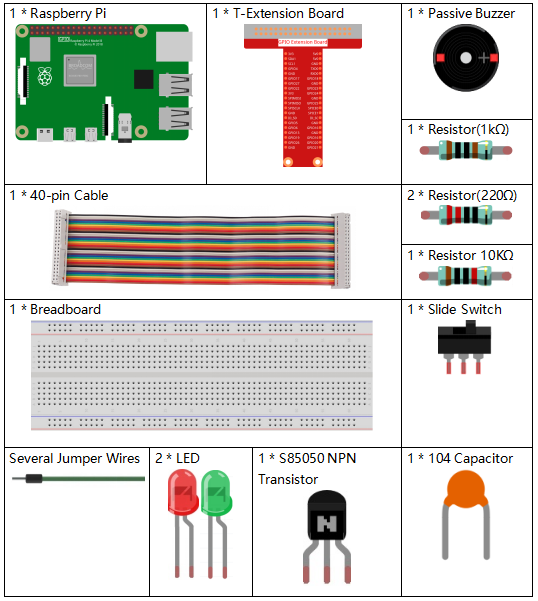
Componenti
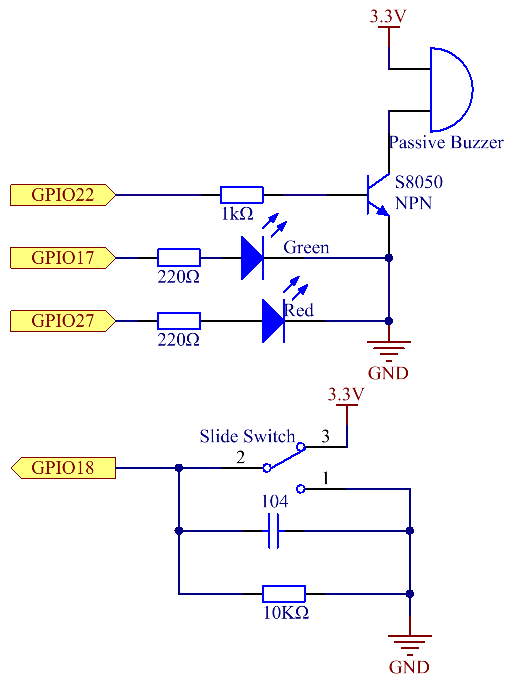
Schema di Collegamento
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procedure Sperimentali
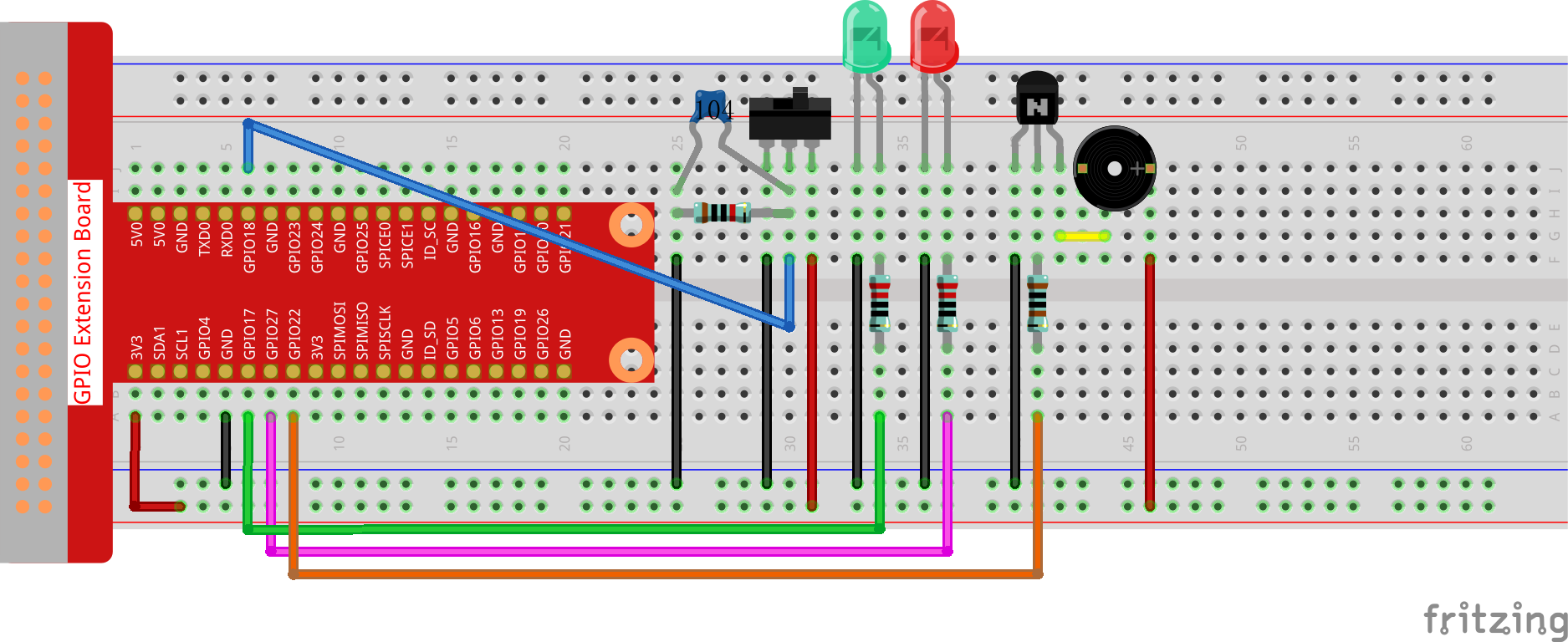
Passo 1: Costruisci il circuito.
Passo 2: Cambia directory.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.10/
Passo 3: Compila.
gcc 3.1.10_AlarmBell.c -lwiringPi -lpthread
Passo 4: Esegui.
sudo ./a.out
Dopo l’avvio del programma, l’interruttore a levetta verrà spostato a destra e il cicalino emetterà un suono di allarme. Allo stesso tempo, i LED rosso e verde lampeggeranno a una determinata frequenza.
Nota
Se non funziona dopo l’esecuzione o compare un messaggio di errore: "wiringPi.h: No such file or directory", consulta Il codice C non funziona?.
Spiegazione del Codice
#include <pthread.h>
In questo codice, utilizzerai una nuova libreria, pthread.h, che contiene una serie di librerie per la gestione dei thread e consente la multithreading. Aggiungiamo il parametro -lpthread in fase di compilazione per consentire il funzionamento indipendente del LED e del cicalino.
void *ledWork(void *arg){
while(1)
{
if(flag==0){
pthread_exit(NULL);
}
digitalWrite(ALedPin,HIGH);
delay(500);
digitalWrite(ALedPin,LOW);
digitalWrite(BLedPin,HIGH);
delay(500);
digitalWrite(BLedPin,LOW);
}
}
La funzione ledWork() serve a definire lo stato di funzionamento dei due
LED: accende il LED verde per 0,5s e poi lo spegne; analogamente, accende il
LED rosso per 0,5s e poi lo spegne.
void *buzzWork(void *arg){
while(1)
{
if(flag==0){
pthread_exit(NULL);
}
if((note>=800)||(note<=130)){
pitch = -pitch;
}
note=note+pitch;
softToneWrite(BeepPin,note);
delay(10);
}
}
La funzione buzzWork() serve a impostare lo stato di funzionamento del
cicalino. Impostiamo la frequenza tra 130 e 800, con un incremento o una
riduzione a intervalli di 20.
void on(){
flag = 1;
if(softToneCreate(BeepPin) == -1){
printf("setup softTone failed !");
return;
}
pthread_t tLed;
pthread_create(&tLed,NULL,ledWork,NULL);
pthread_t tBuzz;
pthread_create(&tBuzz,NULL,buzzWork,NULL);
}
Nella funzione on():
Imposta il valore del segnale di controllo a "flag=1".
Crea un pin a tono controllato tramite software BeepPin.
Crea due thread separati in modo che LED e cicalino possano funzionare contemporaneamente.
pthread_t tLed: Dichiarazione di un thread tLed.
pthread_create(&tLed,NULL,ledWork,NULL): Crea il thread, con prototipo:
int pthread_create(pthread_t *restrict tidp,const pthread_attr_t *restrict_attr, void*(*start_rtn)(void*),void *restrict arg);
Valore di Ritorno
Se ha successo, restituisce "0"; altrimenti, restituisce "-1".
Parametri
void off(){
flag = 0;
softToneStop(BeepPin);
digitalWrite(ALedPin,LOW);
digitalWrite(BLedPin,LOW);
}
La funzione off() imposta "flag=0" per terminare i thread ledWork e
BuzzWork e quindi spegnere il cicalino e i LED.
int main(){
setup();
int lastState = 0;
while(1){
int currentState = digitalRead(switchPin);
if ((currentState == 1)&&(lastState==0)){
on();
}
else if((currentState == 0)&&(lastState==1)){
off();
}
lastState=currentState;
}
return 0;
}
main() contiene l’intero processo del programma: inizialmente legge il
valore dell’interruttore a levetta; se l’interruttore viene spostato a
destra (lettura 1), viene chiamata la funzione on(), il cicalino emette
un suono e i LED rosso e verde lampeggiano. Altrimenti, il cicalino e i LED
rimangono spenti.