Nota
Ciao, benvenuto nella Community su Facebook per gli appassionati di SunFounder Raspberry Pi, Arduino e ESP32! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci dei nuovi prodotti e anteprime esclusive.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e Giveaway Festivi: Partecipa a concorsi e promozioni in occasione delle festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.1.2 Benvenuto
Introduzione
In questo progetto, utilizzeremo un sensore PIR per rilevare il movimento dei passanti e useremo servomotori, LED e un cicalino per simulare il funzionamento della porta automatica di un negozio. Quando un pedone entra nel raggio di rilevamento del PIR, si accenderà la luce di indicazione, la porta si aprirà e il cicalino suonerà il campanello di apertura.
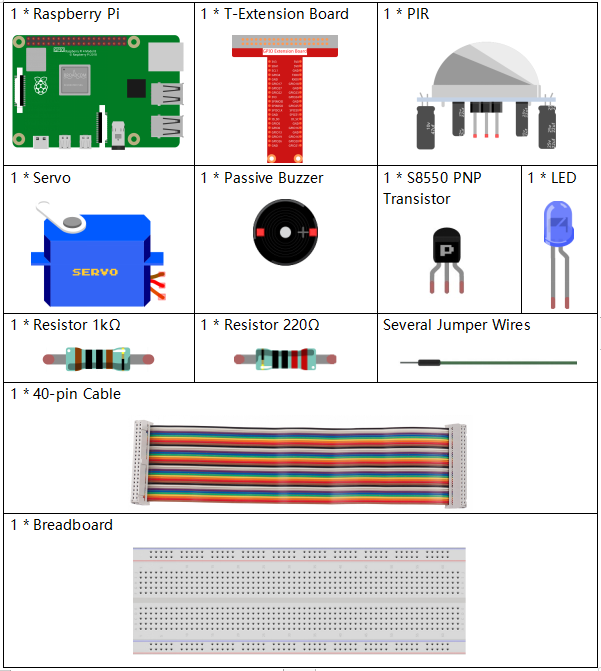
Componenti
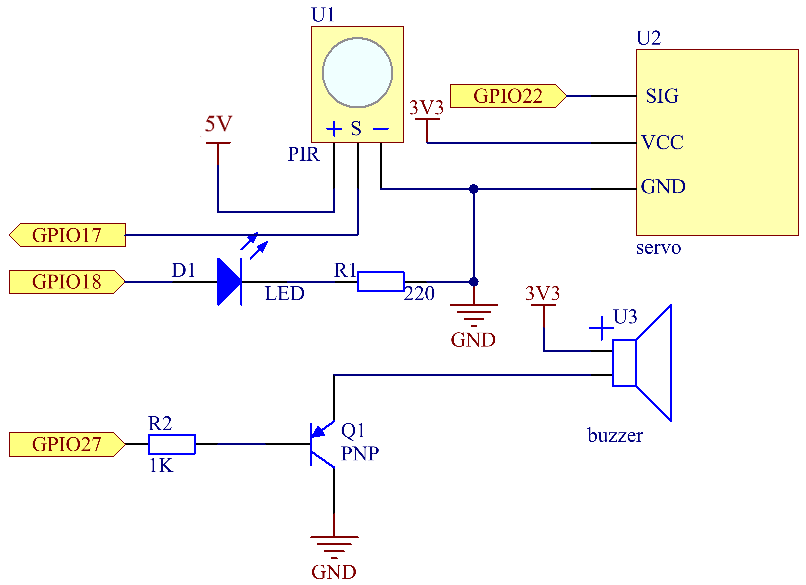
Schema di Collegamento
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procedure Sperimentali
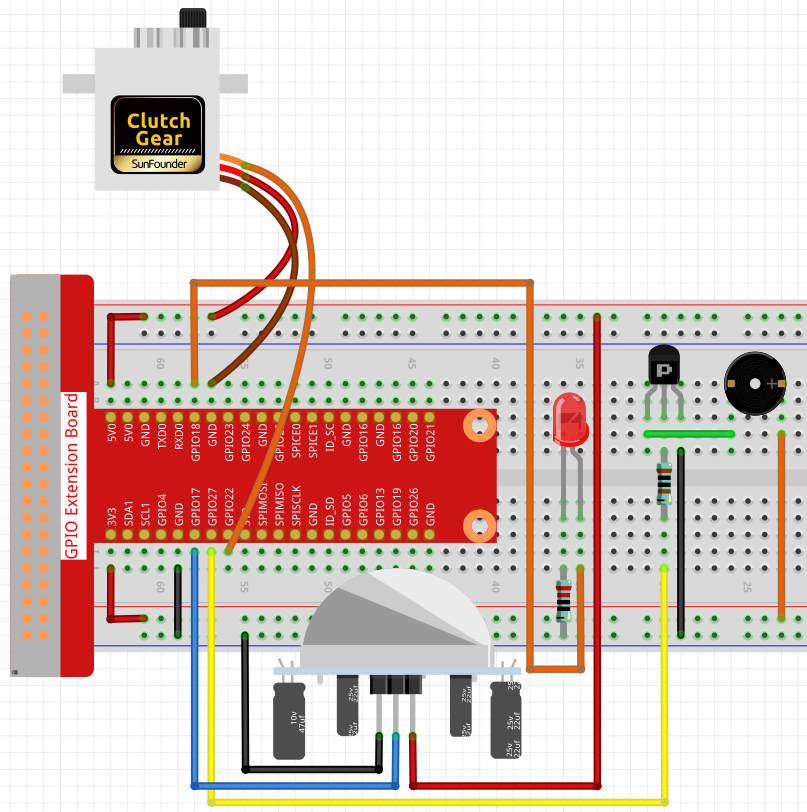
Passo 1: Costruisci il circuito.
Passo 2: Cambia directory.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.2/
Passo 3: Compila.
gcc 3.1.2_Welcome.c -lwiringPi
Passo 4: Esegui.
sudo ./a.out
Dopo l’esecuzione del codice, se il sensore PIR rileva il passaggio di qualcuno, la porta si aprirà automaticamente (simulata dal servo), si accenderà la luce di indicazione e suonerà la musica del campanello. Dopo la riproduzione della musica, il sistema chiuderà automaticamente la porta e spegnerà la luce di indicazione, in attesa del passaggio successivo.
Sul modulo PIR sono presenti due potenziometri: uno per regolare la sensibilità e l’altro per regolare la distanza di rilevamento. Per migliorare le prestazioni del modulo PIR, è necessario ruotare entrambi in senso antiorario fino alla fine.
Nota
Se non funziona dopo l’esecuzione o compare un messaggio di errore: "wiringPi.h: No such file or directory", consulta Il codice C non funziona?.
Spiegazione del Codice
void setAngle(int pin, int angle){ //Crea una funzione per controllare l'angolo del servomotore.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin, Map(angle, 0, 180, 5, 25));
}
Crea la funzione setAngle per impostare l’angolo nel servomotore da 0 a 180 gradi.
void doorbell(){
for(int i=0;i<sizeof(song)/4;i++){
softToneWrite(BuzPin, song[i]);
delay(beat[i] * 250);
}
Crea la funzione doorbell per far suonare il cicalino.
void closedoor(){
digitalWrite(ledPin, LOW); //spegne il LED
for(int i=180;i>-1;i--){ //fa ruotare il servo dall'angolo massimo all'angolo minimo
setAngle(servoPin, i);
delay(1);
}
}
Crea la funzione closedoor per simulare la chiusura della porta, spegnere il LED e fare ruotare il servo da 180 a 0 gradi.
void opendoor(){
digitalWrite(ledPin, HIGH); //accende il LED
for(int i=0;i<181;i++){ //fa ruotare il servo dall'angolo minimo all'angolo massimo
setAngle(servoPin, i);
delay(1);
}
doorbell();
closedoor();
}
La funzione opendoor() comprende varie azioni: accendere la luce di indicazione, ruotare il servo (simulando l’apertura della porta), suonare il campanello del negozio e chiamare la funzione closedoor() dopo la riproduzione della musica.
int main(void)
{
if(wiringPiSetup() == -1){ //se l'inizializzazione di wiring fallisce, stampa un messaggio a schermo
printf("setup wiringPi failed !");
return 1;
}
if(softToneCreate(BuzPin) == -1){
printf("setup softTone failed !");
return 1;
}
......
Nella funzione main(), inizializza la libreria wiringPi e configura softTone, quindi imposta ledPin come uscita e pirPin come ingresso. Se il sensore PIR rileva il passaggio di qualcuno, verrà chiamata la funzione opendoor per simulare l’apertura della porta.