Note
Bonjour et bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 sur Facebook ! Plongez plus profondément dans l’univers du Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Assistance d’experts : Résolvez les problèmes après-vente et relevez les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Obtenez un accès anticipé aux annonces de nouveaux produits et à des avant-premières.
Réductions spéciales : Profitez de remises exclusives sur nos derniers produits.
Promotions festives et concours : Participez à des concours et à des promotions spéciales.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
2.2.1 Photoresistance (MCP3008)
Note
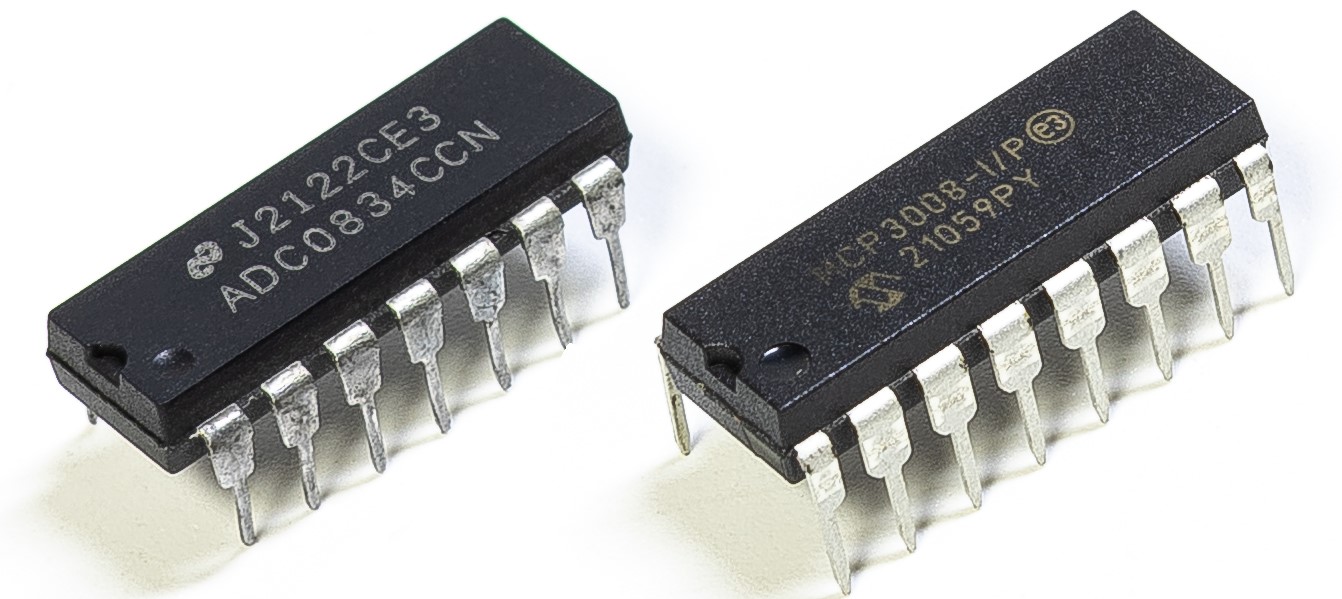
Selon la version de votre kit, identifiez si vous avez un ADC0834 ou un MCP3008 et suivez la section correspondante.
Introduction
La photoresistance est un composant couramment utilisé pour mesurer l’intensité lumineuse ambiante. Elle aide le contrôleur à distinguer le jour de la nuit et à réaliser des fonctions de contrôle de lumière, comme une lampe de nuit. Ce projet est très similaire à celui du potentiomètre : au lieu de mesurer une variation de tension causée par un réglage manuel, il mesure la variation de tension causée par la lumière.
Composants requis
Dans ce projet, nous avons besoin des composants suivants :
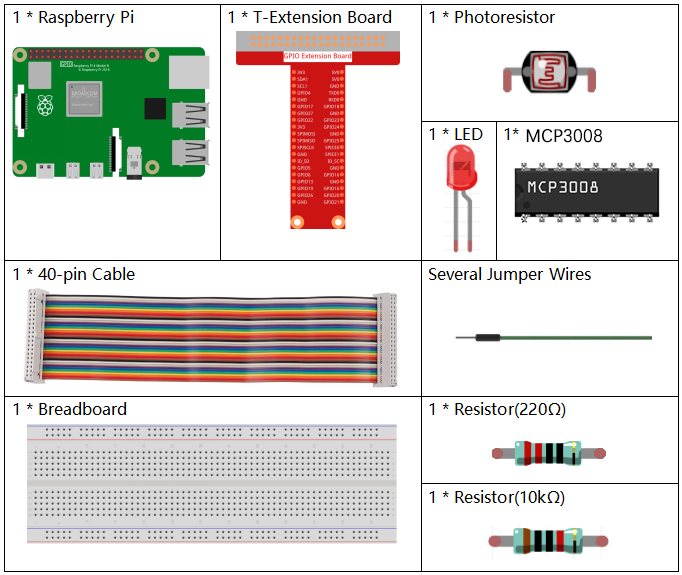
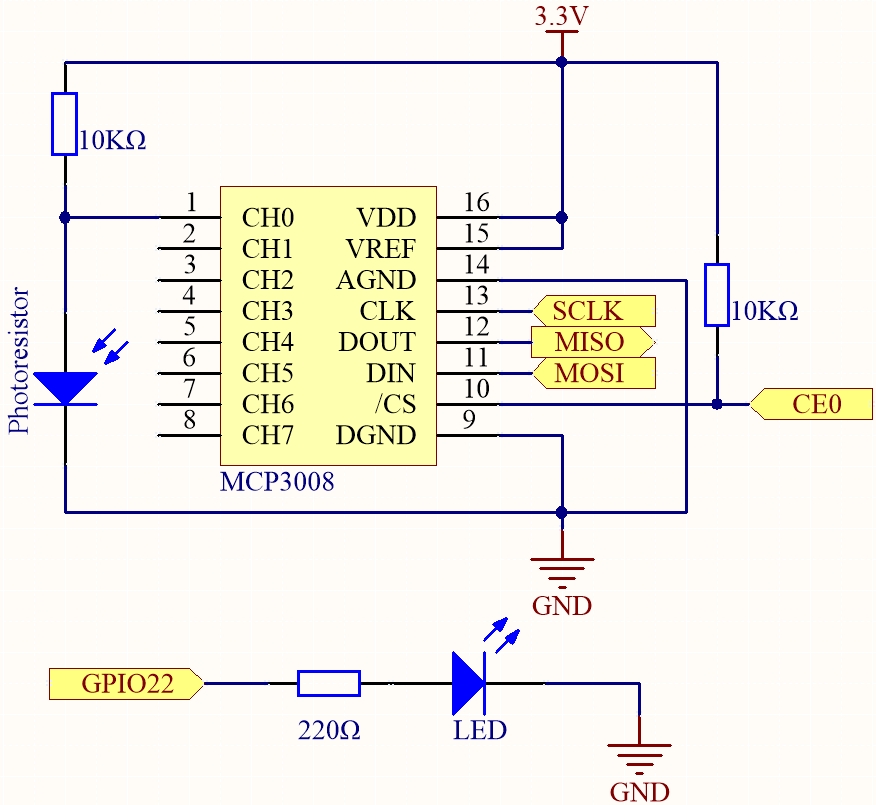
Schéma de câblage
Nom sur la T-Board |
physique |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Procédures expérimentales
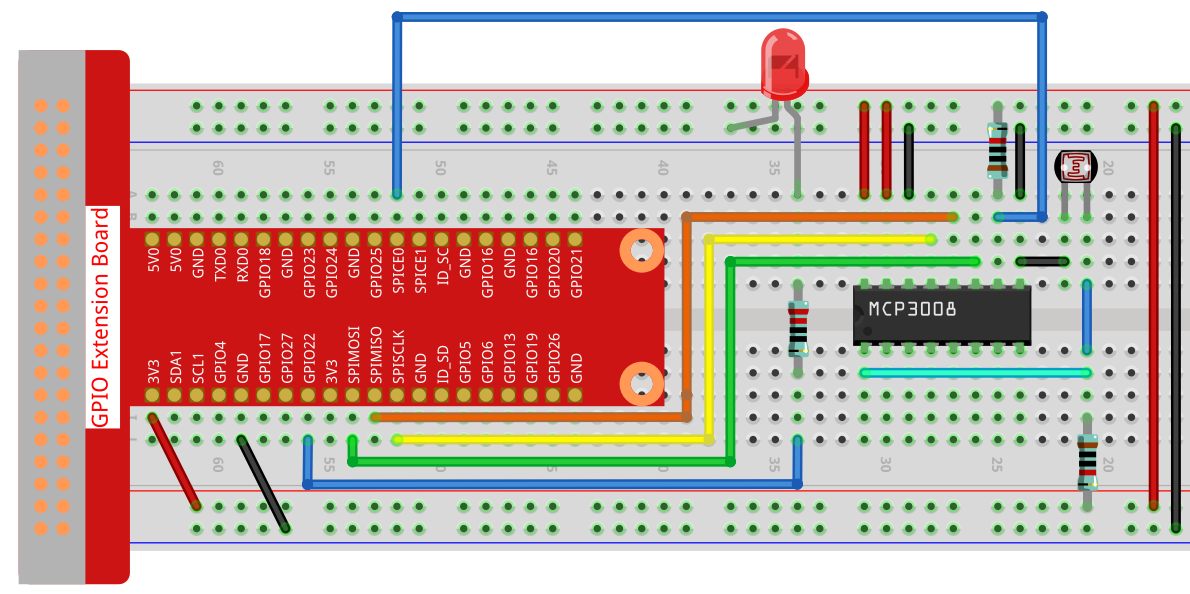
Étape 1 : Construire le circuit.
Étape 2 : Configurer l’interface SPI et installer la bibliothèque spidev (voir Configuration SPI pour des instructions détaillées).
Si vous avez déjà effectué ces étapes, vous pouvez les ignorer.
Étape 3 : Accéder au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Étape 4 : Exécuter le fichier.
sudo python3 2.2.1-2_Photoresistor_zero.py
Lorsque le code est en cours d’exécution, la luminosité de la LED changera en fonction de l’intensité lumineuse détectée par la photoresistance.
Avertissement
Si un message d’erreur apparaît : RuntimeError: Cannot determine SOC peripheral base address,
veuillez consulter Si gpiozero ne fonctionne pas.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous.
Mais avant cela, vous devez vous rendre dans le chemin du code source, par exemple
davinci-kit-for-raspberry-pi/python-pi5. Après modification, vous pouvez exécuter le code directement pour voir le résultat.
#!/usr/bin/env python3
import spidev
import time
from gpiozero import PWMLED
# Initialiser une LED PWM sur la broche GPIO 22
led = PWMLED(22)
# Initialiser la communication SPI (Bus 0, CE0 -> GPIO8)
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CS0
spi.max_speed_hz = 1000000 # 1 MHz
# Fonction pour lire depuis un canal MCP3008 (0–7)
def read_adc(channel):
"""
Lire une valeur analogique depuis MCP3008 (0–1023)
"""
if channel < 0 or channel > 7:
return -1
# Protocole MCP3008 : bit de démarrage, mode single-ended, canal (3 bits), remplissage
r = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((r[1] & 3) << 8) | r[2]
return value
# Fonction pour mapper une valeur d’un intervalle à un autre
def MAP(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
# Boucle principale : lire la valeur ADC et contrôler la luminosité de la LED
def loop():
while True:
# Lire la valeur analogique depuis le canal 0 du MCP3008
analogVal = read_adc(0)
print('value = %d' % analogVal)
# Mapper 0–1023 vers la plage PWM 0.0–1.0
led.value = analogVal / 1023.0
# Attendre 0,2 seconde
time.sleep(0.2)
# Lancer la boucle principale et gérer KeyboardInterrupt pour un arrêt propre
try:
loop()
except KeyboardInterrupt:
led.value = 0 # Éteindre la LED avant de quitter
Explication du code
Cette partie importe la classe
PWMLEDde la bibliothèquegpiozeropour contrôler une LED en PWM,spidevpour la communication SPI avec le MCP3008, ettimepour introduire des pauses.#!/usr/bin/env python3 import spidev import time from gpiozero import PWMLED
Initialise une LED PWM connectée à la broche GPIO 22 et configure l’interface SPI pour le MCP3008 (Bus 0, CE0). La vitesse d’horloge SPI est réglée à 1 MHz.
# Initialiser une LED PWM sur la broche GPIO 22 led = PWMLED(22) # Initialiser la communication SPI (Bus 0, CE0 -> GPIO8) spi = spidev.SpiDev() spi.open(0, 0) # Bus 0, CS0 spi.max_speed_hz = 1000000 # 1 MHz
Définit une fonction pour lire depuis un canal spécifique du MCP3008. Elle envoie une commande sur 3 octets via SPI et récupère une valeur sur 10 bits (0–1023).
# Fonction pour lire depuis un canal MCP3008 (0–7) def read_adc(channel): """ Lire une valeur analogique depuis MCP3008 (0–1023) """ if channel < 0 or channel > 7: return -1 # Protocole MCP3008 : bit de démarrage, mode single-ended, canal (3 bits), remplissage r = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((r[1] & 3) << 8) | r[2] return value
Définit une fonction utilitaire
MAP()qui convertit une valeur d’un intervalle à un autre, utile pour transformer une valeur ADC brute en valeur PWM.# Fonction pour mapper une valeur d’un intervalle à un autre def MAP(x, in_min, in_max, out_min, out_max): return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
Met en place une boucle qui lit continuellement la valeur analogique depuis le canal 0 du MCP3008, la convertit en luminosité PWM (0.0–1.0) et l’applique à la LED. La boucle attend 0,2 seconde entre chaque lecture.
# Boucle principale : lire la valeur ADC et contrôler la luminosité de la LED def loop(): while True: # Lire la valeur analogique depuis le canal 0 du MCP3008 analogVal = read_adc(0) print('value = %d' % analogVal) # Mapper 0–1023 vers la plage PWM 0.0–1.0 led.value = analogVal / 1023.0 # Attendre 0,2 seconde time.sleep(0.2)
Exécute la boucle et gère l’interruption
KeyboardInterrupt. Lorsque l’utilisateur interrompt le programme (Ctrl+C), la LED est éteinte avant la sortie.# Lancer la boucle principale et gérer KeyboardInterrupt pour un arrêt propre try: loop() except KeyboardInterrupt: # Éteindre la LED avant de quitter led.value = 0