Note
Bonjour, bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts sur Facebook ! Plongez dans l’univers du Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits.
Réductions spéciales : Profitez de réductions exclusives sur nos derniers produits.
Promotions festives et cadeaux : Participez à des concours et des offres spéciales pendant les fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
2.2.4 PIR
Introduction
Dans ce projet, nous allons utiliser des capteurs pyrosélectriques infrarouges pour détecter la présence humaine. Lorsque quelqu’un s’approche, la LED s’allume automatiquement. Sinon, elle s’éteint. Ce capteur de mouvement infrarouge est capable de détecter le rayonnement infrarouge émis par les êtres humains et les animaux.
Composants nécessaires
Pour ce projet, nous avons besoin des composants suivants.
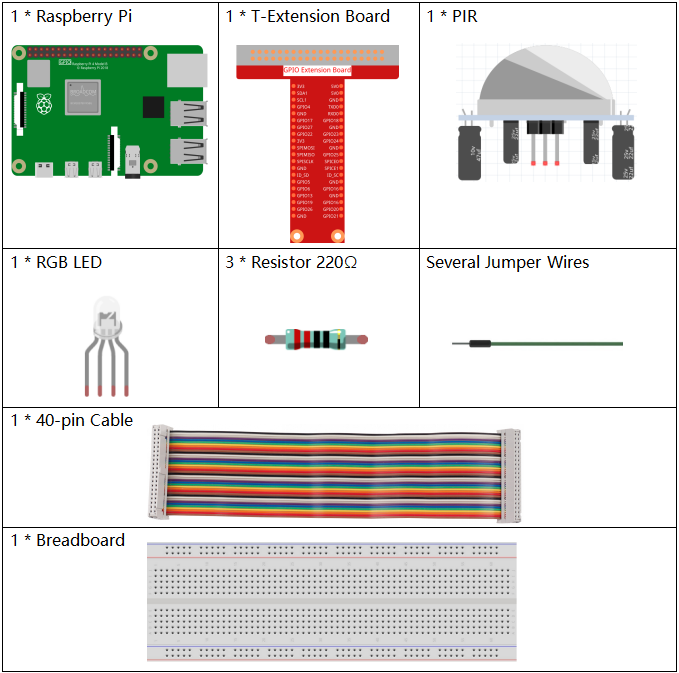
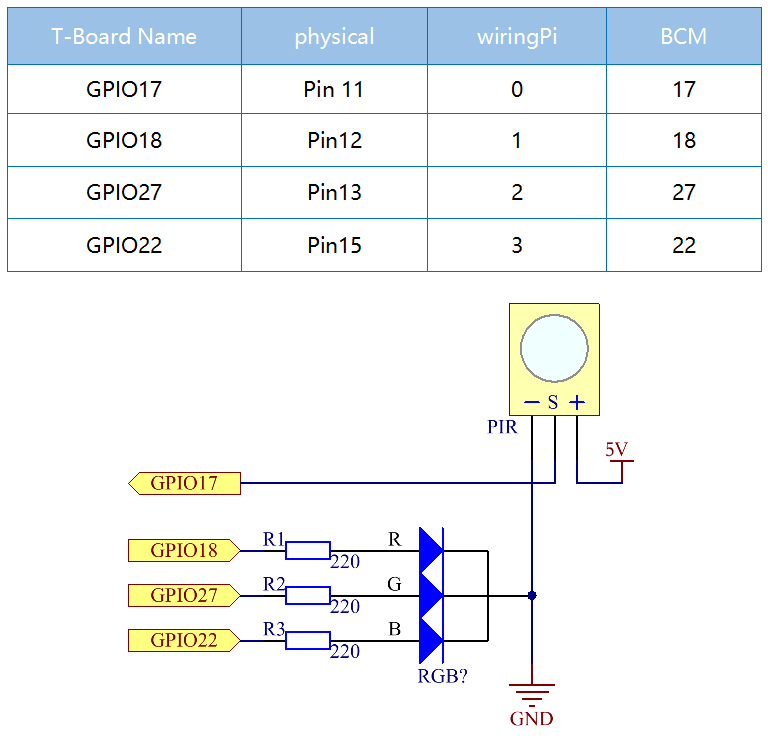
Schéma de câblage
Procédure expérimentale
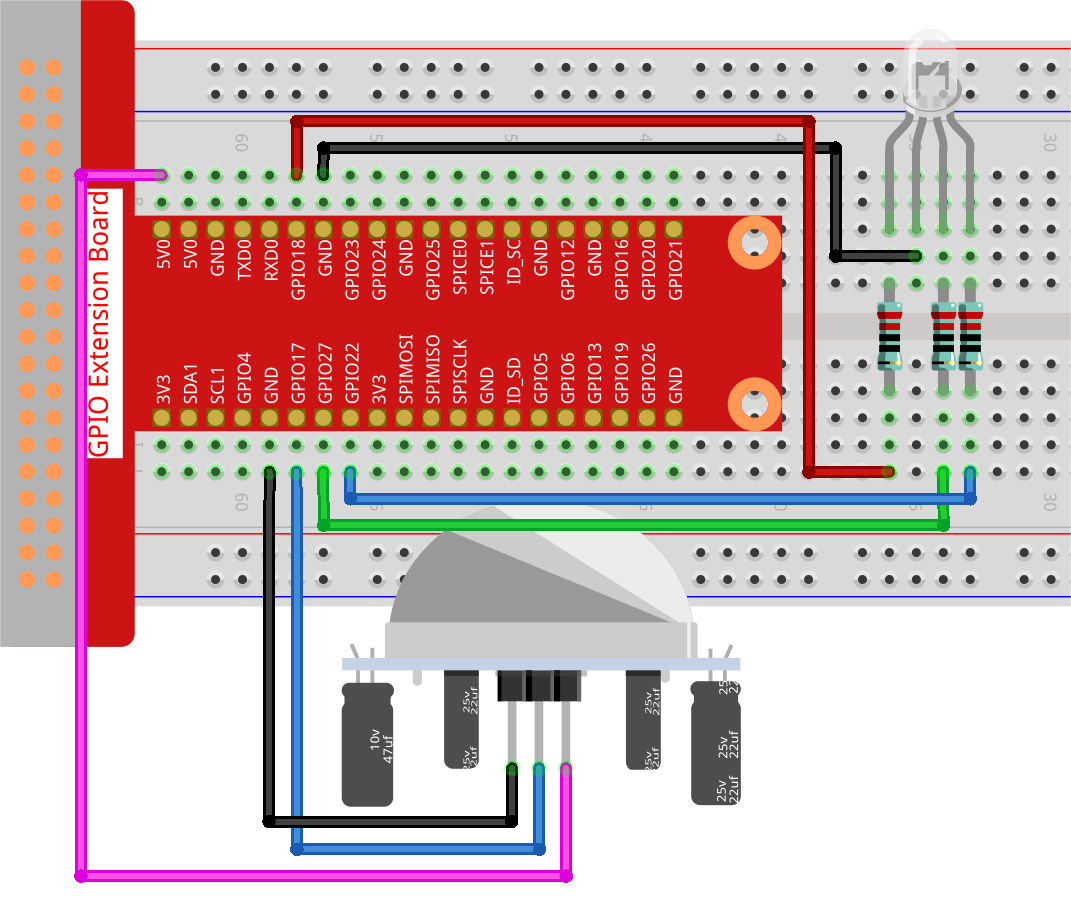
Étape 1 : Montez le circuit.
Étape 2 : Accédez au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Étape 3 : Exécutez le fichier exécutable.
sudo python3 2.2.4_PIR.py
Lorsque le code s’exécute, le capteur PIR détecte l’environnement et fait briller la LED RGB en jaune si une présence est détectée.
Il y a deux potentiomètres sur le module PIR : l’un permet de régler la sensibilité, l’autre la distance de détection. Pour un meilleur fonctionnement du module PIR, tournez-les tous les deux dans le sens antihoraire jusqu’à la butée.

Avertissement
En cas de message d’erreur RuntimeError: Cannot determine SOC peripheral base address, veuillez consulter Si gpiozero ne fonctionne pas..
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, assurez-vous de vous rendre dans le chemin source du code, tel que davinci-kit-for-raspberry-pi/python-pi5.
#!/usr/bin/env python3
from gpiozero import RGBLED, MotionSensor
from time import sleep
# Initialiser la LED RGB et le capteur de mouvement PIR avec la bibliothèque GPIO Zero
led = RGBLED(red=18, green=27, blue=22) # LED RGB connectée aux broches GPIO 18 (Rouge), 27 (Vert), 22 (Bleu)
pir = MotionSensor(17) # Capteur PIR connecté à la broche GPIO 17
try:
# Surveiller en continu les mouvements et mettre à jour la couleur de la LED
while True:
if pir.motion_detected: # Vérifier si le capteur PIR détecte un mouvement
led.color = (1, 1, 0) # Régler la couleur de la LED en jaune (Rouge + Vert)
else:
led.color = (0, 0, 1) # Régler la couleur de la LED en bleu (seulement le Bleu)
sleep(0.1) # Pause courte pour réduire la charge CPU
except KeyboardInterrupt:
# Gérer l'interruption clavier (Ctrl+C) pour quitter proprement la boucle
pass
Explication du code
Importe la classe
RGBLEDpour contrôler une LED RGB et la classeMotionSensorpour la détection de mouvement depuis la bibliothèque GPIO Zero. Importe également la fonctionsleeppour introduire des délais.#!/usr/bin/env python3 from gpiozero import RGBLED, MotionSensor from time import sleep
Initialise une LED RGB avec des composants rouge, vert et bleu connectés respectivement aux broches GPIO 18, 27 et 22. Initialise également un capteur PIR sur la broche GPIO 17.
# Initialiser la LED RGB et le capteur de mouvement PIR avec la bibliothèque GPIO Zero led = RGBLED(red=18, green=27, blue=22) # LED RGB connectée aux broches GPIO 18 (Rouge), 27 (Vert), 22 (Bleu) pir = MotionSensor(17) # Capteur PIR connecté à la broche GPIO 17
Le programme entre dans une boucle infinie, surveillant en continu les mouvements détectés par le capteur PIR. Si un mouvement est détecté, la LED devient jaune (mélange de rouge et vert). En l’absence de mouvement, la LED devient bleue. Un délai court de 0,1 seconde réduit la charge CPU.
try: # Surveiller en continu les mouvements et mettre à jour la couleur de la LED while True: if pir.motion_detected: # Vérifier si le capteur PIR détecte un mouvement led.color = (1, 1, 0) # Régler la couleur de la LED en jaune (Rouge + Vert) else: led.color = (0, 0, 1) # Régler la couleur de la LED en bleu (seulement le Bleu) sleep(0.1) # Pause courte pour réduire la charge CPU except KeyboardInterrupt: # Gérer l'interruption clavier (Ctrl+C) pour quitter proprement la boucle pass