Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook. Profundiza en Raspberry Pi, Arduino y ESP32 junto con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
3.1.8 Monitor de sobrecalentamiento (MCP3008)
Nota
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
Podrías querer fabricar un dispositivo de monitoreo de sobrecalentamiento que se aplique a diversas situaciones, por ejemplo, en una fábrica, si queremos tener una alarma y el apagado automático de la máquina cuando un circuito se sobrecalienta. En este proyecto, usaremos un termistor, joystick, zumbador, LED y LCD para crear un dispositivo inteligente de monitoreo de temperatura cuyo umbral sea ajustable.
Componentes necesarios
En este proyecto, necesitamos los siguientes componentes.
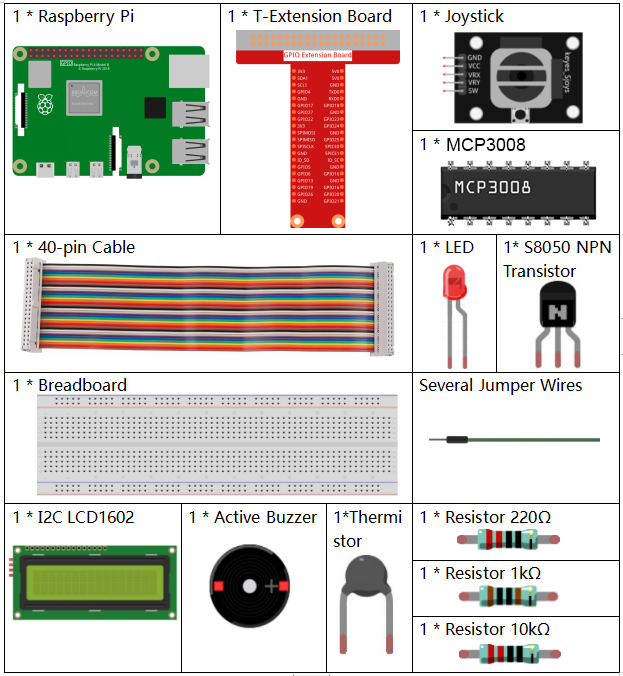
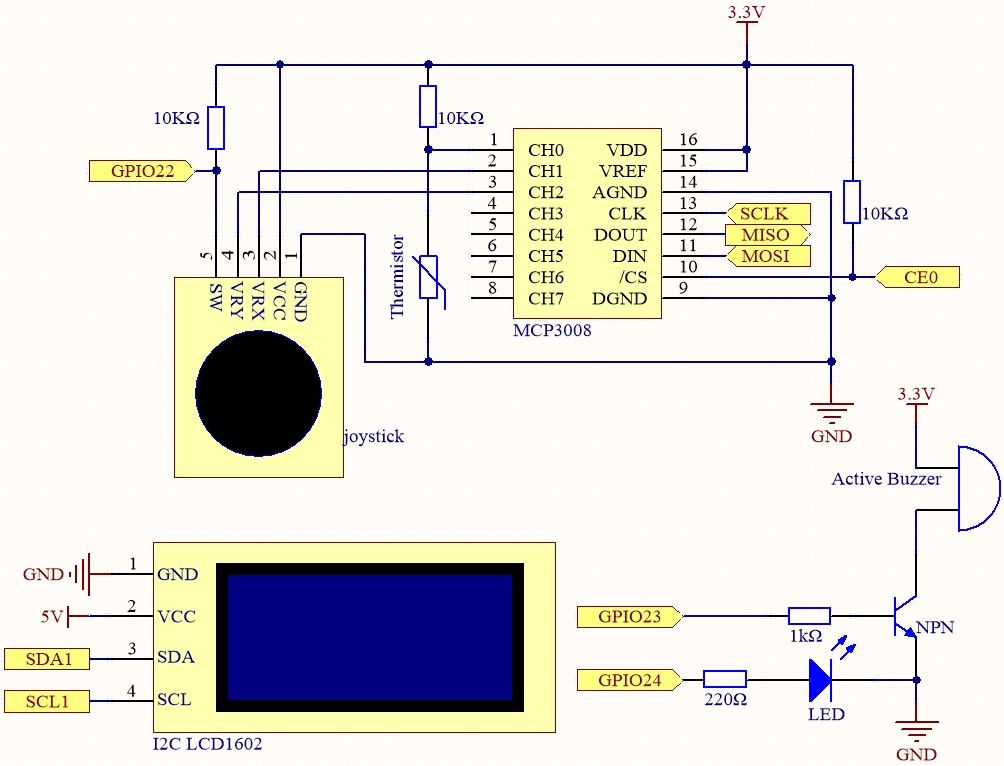
Diagrama esquemático
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin15 |
3 |
22 |
GPIO23 |
Pin16 |
4 |
23 |
GPIO24 |
Pin18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Procedimientos experimentales
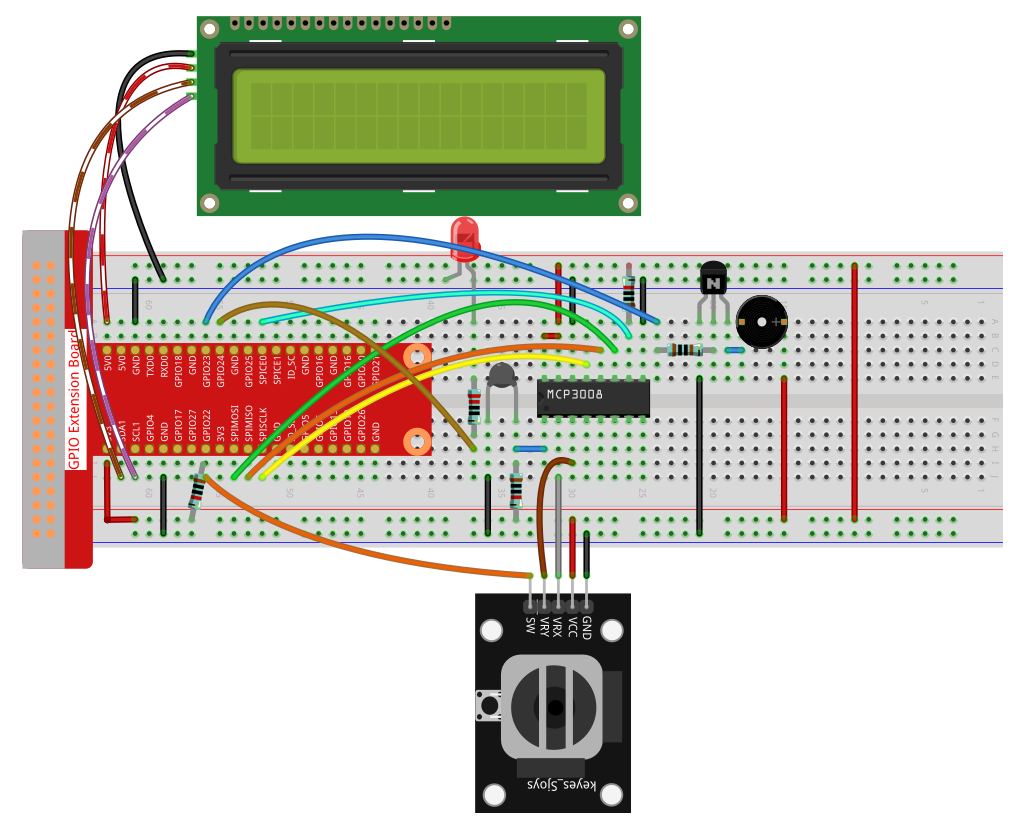
Paso 1: Construir el circuito.
Paso 2: Configurar la interfaz SPI e instalar la librería spidev (consulta Configuración de SPI para instrucciones detalladas). Si ya completaste estos pasos, puedes saltar este.
Paso 3: Ir a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Paso 4: Ejecutar el archivo.
sudo python3 3.1.8-2_OverheatMonitor_zero.py
Cuando el código se ejecute, la temperatura actual y el umbral de alta temperatura 40 se mostrarán en la I2C LCD1602. Si la temperatura actual es mayor que el umbral, el zumbador y el LED se activarán para avisarte.
El joystick aquí se utiliza para ajustar el umbral de alta temperatura. Mover el joystick en la dirección del eje X o Y ajusta (sube o baja) el umbral. Presionar el joystick nuevamente restablece el umbral a su valor inicial.
Nota
Si recibes el error
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', debes consultar Configuración de I²C para habilitar el I2C.Si recibes el error
ModuleNotFoundError: No module named 'smbus2', ejecutasudo pip3 install smbus2.Si aparece el error
OSError: [Errno 121] Remote I/O error, significa que el módulo está mal cableado o está dañado.Si el código y el cableado son correctos, pero el LCD aún no muestra contenido, puedes girar el potenciómetro en la parte posterior para aumentar el contraste.
Advertencia
Si aparece el error RuntimeError: Cannot determine SOC peripheral base address, consulta Si gpiozero no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código de abajo. Pero antes, debes ir a la ruta del código fuente como davinci-kit-for-raspberry-pi/python. Después de modificarlo, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
import LCD1602
from gpiozero import LED, Buzzer, Button
import spidev
import time
import math
# Inicializar botón del joystick, zumbador y LED
Joy_BtnPin = Button(22) # GPIO22, Pin15
buzzPin = Buzzer(23) # GPIO23, Pin16
ledPin = LED(24) # GPIO24, Pin18
# Umbral superior de temperatura inicial
upperTem = 40
# Inicializar SPI para MCP3008 (Bus 0, CE0 -> GPIO8 / Pin24)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Inicializar LCD (dirección I2C 0x27, retroiluminación encendida)
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Lee valor analógico del MCP3008 (0–7)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Lee los valores del joystick y retorna un cambio según su posición.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Ajusta y muestra en el LCD el umbral superior de temperatura.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Lee la temperatura actual del sensor y la retorna en Celsius.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0 # Voltaje a través de la resistencia fija
if Vr == 0:
return 0 # Evita división por cero
Rt = 10000.0 * Vr / (3.3 - Vr) # Fórmula ajustada: voltaje del termistor es (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Monitorea y muestra la temperatura y el umbral en el LCD.
Activa zumbador y LED si la temperatura supera el límite.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
buzzPin.on()
ledPin.on()
else:
buzzPin.off()
ledPin.off()
# Bucle principal
try:
lastState = 1
stage = 0
while True:
currentState = Joy_BtnPin.value
if currentState == 1 and lastState == 0:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
LCD1602.clear()
spi.close()
Explicación del código
Esta sección importa las librerías necesarias.
LCD1602es para la pantalla LCD vía I2C,gpiozeroprovee soporte para el LED, zumbador y botón,spidevse usa para comunicarse con el ADC MCP3008 y las librerías estándartimeymathse usan para retardos y cálculos de temperatura.#!/usr/bin/env python3 import LCD1602 from gpiozero import LED, Buzzer, Button import spidev import time import math
Inicializa los componentes de hardware conectados a los pines GPIO:
Button(22)conecta el botón del joystick.Buzzer(23)yLED(24)sirven como indicadores de sobrecalentamiento.
Joy_BtnPin = Button(22) # GPIO22, Pin15 buzzPin = Buzzer(23) # GPIO23, Pin16 ledPin = LED(24) # GPIO24, Pin18
Establece el umbral superior de temperatura por defecto e inicializa SPI para MCP3008 y la pantalla LCD1602.
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
read_adclee el valor analógico de un canal específico (0–7) del MCP3008 y retorna un valor de 10 bits.def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
get_joystick_valueevalúa la posición del joystick leyendo los canales 1 y 2 del MCP3008 y retorna valores diferentes para ajustes de umbral según la dirección del movimiento.def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
upper_tem_settingajusta el umbral superior con el joystick y lo muestra en el LCD, asegurando un formato limpio.def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
temperaturelee el valor analógico del canal 0 (termistor), calcula el voltaje, la resistencia y finalmente la temperatura en Celsius usando la aproximación de Steinhart–Hart.def temperature(): """ Reads the current temperature from the sensor and returns it in Celsius. """ analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 # Voltage across the fixed resistor if Vr == 0: return 0 # Prevent division by zero Rt = 10000.0 * Vr / (3.3 - Vr) # Adjusted formula: thermistor voltage is (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return round(Cel, 2)
monitoring_templee continuamente la temperatura actual, la compara con el umbral y muestra ambos valores en el LCD. Si la temperatura excede el umbral, enciende el zumbador y el LED.def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: buzzPin.on() ledPin.on() else: buzzPin.off() ledPin.off()
El bucle principal alterna entre modo de ajuste y modo de monitoreo usando el botón del joystick. Una pulsación cambia de modo. En ajuste, se modifica el umbral; en monitoreo, se verifica la temperatura.
try: lastState = 1 stage = 0 while True: currentState = Joy_BtnPin.value if currentState == 1 and lastState == 0: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
Al salir con interrupción de teclado, se limpia la pantalla LCD y se cierra la comunicación SPI.
except KeyboardInterrupt: LCD1602.clear() spi.close()