Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook. Profundiza en Raspberry Pi, Arduino y ESP32 junto con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones y sorteos festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
3.1.5 Indicador de batería (MCP3008)
Nota
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
En este proyecto, haremos un dispositivo indicador de batería que puede mostrar visualmente el nivel de la batería en la barra de LED (LED Bargraph).
Advertencia
No utilices componentes de batería que excedan 3.3V para evitar sobrecargas, ya que pueden dañar el chip o la Raspberry Pi.
Componentes necesarios
En este proyecto, necesitamos los siguientes componentes.
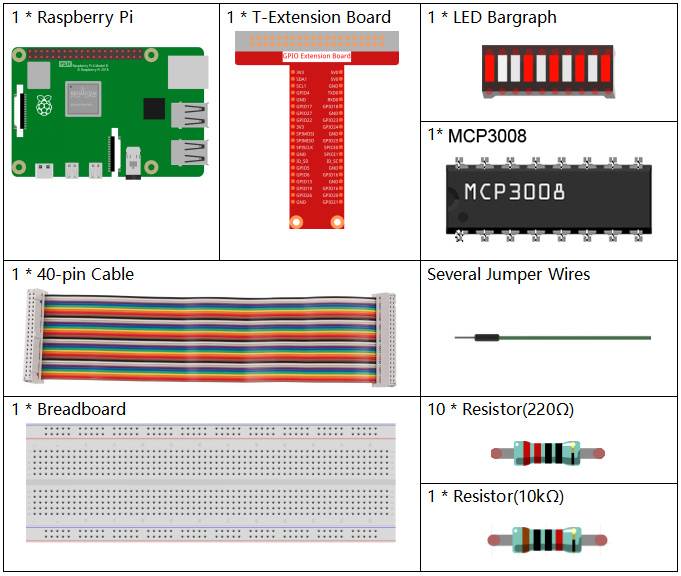
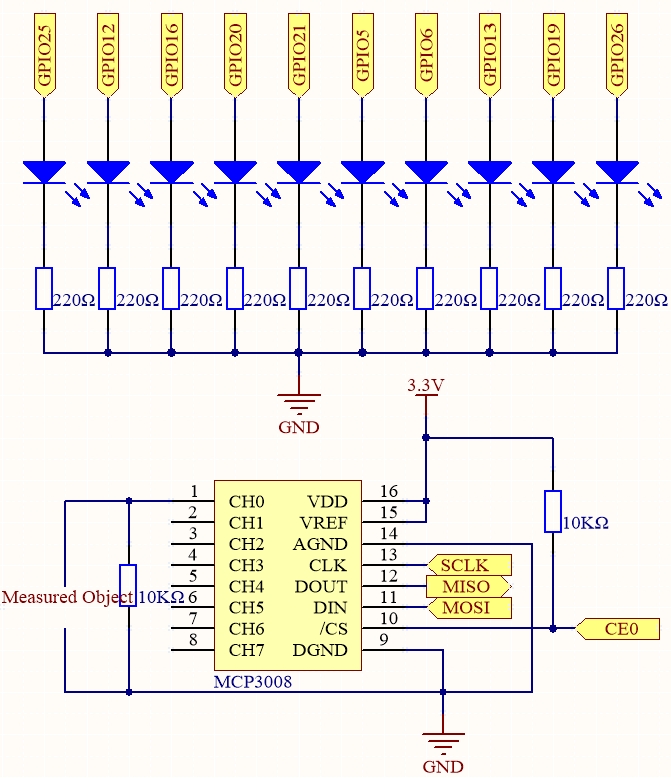
Diagrama esquemático
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO25 |
Pin 22 |
6 |
25 |
GPIO12 |
Pin 32 |
26 |
12 |
GPIO16 |
Pin 36 |
27 |
16 |
GPIO20 |
Pin 38 |
28 |
20 |
GPIO21 |
Pin 40 |
29 |
21 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
GPIO19 |
Pin 35 |
24 |
19 |
GPIO26 |
Pin 37 |
25 |
26 |
Procedimientos experimentales
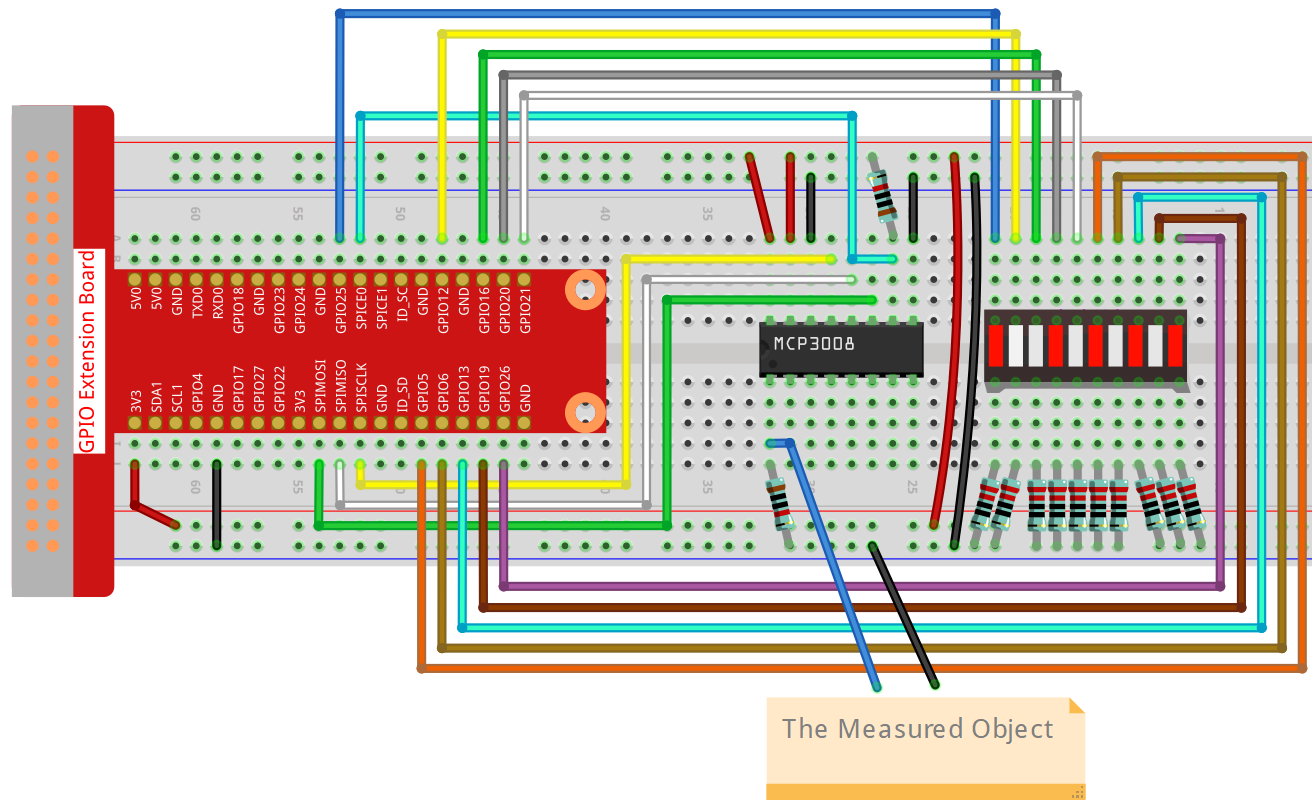
Paso 1: Construir el circuito.
Paso 2: Configurar la interfaz SPI e instalar la librería spidev (consulta Configuración de SPI para instrucciones detalladas). Si ya completaste estos pasos, puedes saltar este.
Paso 3: Ir a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Paso 4: Ejecutar el archivo.
sudo python3 3.1.5-2_Battery_indicator_zero.py
Después de que el programa se ejecute, conecta un cable desde el pin 3 del MCP3008 y otro desde GND, y luego conéctalos a los dos polos de una batería. Podrás ver que el LED correspondiente en la barra de LED se ilumina para mostrar el nivel de energía (rango de medición: 0-5V).
Advertencia
Si aparece el mensaje de error RuntimeError: Cannot determine SOC peripheral base address, consulta Si gpiozero no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código de abajo. Pero antes, debes ir a la ruta del código fuente como davinci-kit-for-raspberry-pi/python-pi5. Después de modificarlo, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
import LCD1602
from gpiozero import LED, Buzzer, Button
import spidev
import time
import math
# Inicializar botón del joystick, zumbador y LED
Joy_BtnPin = Button(22) # GPIO22, Pin15
buzzPin = Buzzer(23) # GPIO23, Pin16
ledPin = LED(24) # GPIO24, Pin18
# Umbral superior de temperatura inicial
upperTem = 40
# Inicializar SPI para MCP3008 (Bus 0, CE0 -> GPIO8 / Pin24)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Inicializar LCD (dirección I2C 0x27, retroiluminación encendida)
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Leer valor analógico del MCP3008
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Lee los valores del joystick y retorna un cambio según su posición.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Ajusta y muestra en el LCD el umbral superior de temperatura.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Lee la temperatura actual del sensor y la retorna en Celsius.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
if Vr == 0:
return 0
Rt = 10000.0 * (3.3 - Vr) / Vr
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Monitorea y muestra la temperatura y el umbral en el LCD.
Activa zumbador y LED si la temperatura supera el límite.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
buzzPin.on()
ledPin.on()
else:
buzzPin.off()
ledPin.off()
# Bucle principal
try:
lastState = 1
stage = 0
while True:
currentState = Joy_BtnPin.value
if currentState == 1 and lastState == 0:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
LCD1602.clear()
spi.close()
Explicación del código
Este programa en Python corre en una Raspberry Pi y usa un conversor analógico-digital MCP3008 para leer datos de temperatura desde un sensor analógico. Un joystick ajusta el umbral de temperatura y un LCD1602 muestra la temperatura actual y el umbral. Un zumbador y un LED se activan cuando la temperatura supera el umbral.
Importar librerías necesarias
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math import LCD1602
RPi.GPIOcontrola pines GPIO.spidevse comunica con el MCP3008 mediante SPI.mathse usa para cálculos de conversión de temperatura.LCD1602controla la pantalla LCD.
Configuración de GPIO
JOY_BTN_PIN = 22 BUZZER_PIN = 23 LED_PIN = 24 GPIO.setmode(GPIO.BCM) GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(BUZZER_PIN, GPIO.OUT) GPIO.setup(LED_PIN, GPIO.OUT)
Asigna pines para el botón del joystick, zumbador y LED.
Configura el botón con resistencia pull-up y pines de salida en bajo inicialmente.
Inicialización de SPI y LCD
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
Inicia la comunicación SPI para el MCP3008.
Configura la pantalla LCD1602 en la dirección
0x27.
Leer canal ADC
def read_adc(channel): ... return value
Envía comandos SPI para leer el voltaje analógico del canal seleccionado (0–7).
Retorna un valor de 10 bits entre 0 y 1023.
Entrada direccional del joystick
def get_joystick_value(): ... return cambio
Lee movimiento horizontal y vertical del joystick y lo traduce en cambios en el umbral: * Arriba/Abajo ajusta ±10 * Izquierda/Derecha ajusta ±1
Ajustar umbral de temperatura
def upper_tem_setting(): ... time.sleep(0.1)
Permite cambiar el valor de
upperTemcon el joystick.Actualiza el LCD para mostrar el valor.
Calcular temperatura desde el sensor analógico
def temperature(): ... return round(Cel, 2)
Convierte voltaje a resistencia y luego aplica la ecuación de Steinhart-Hart para obtener la temperatura en Celsius.
Modo de monitoreo
def monitoring_temp(): ... time.sleep(0.1)
Muestra la temperatura y el umbral.
Activa zumbador y LED si la temperatura supera el límite.
Bucle principal
try: ... if stage == 1: upper_tem_setting() else: monitoring_temp()
Alterna entre: *
stage 0: monitoreo *stage 1: ajuste de umbral
Limpieza al salir
except KeyboardInterrupt: pass finally: LCD1602.clear() GPIO.cleanup() spi.close()
Asegura que GPIO y LCD se restablezcan al finalizar el programa.