Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook. Profundiza en Raspberry Pi, Arduino y ESP32 junto con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones y sorteos festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
3.1.4 Ventilador Inteligente (MCP3008)
Nota
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
En este proyecto, usaremos motores, botones y termistores para hacer un ventilador inteligente manual + automático cuya velocidad de viento es ajustable.
Componentes necesarios
En este proyecto, necesitamos los siguientes componentes.
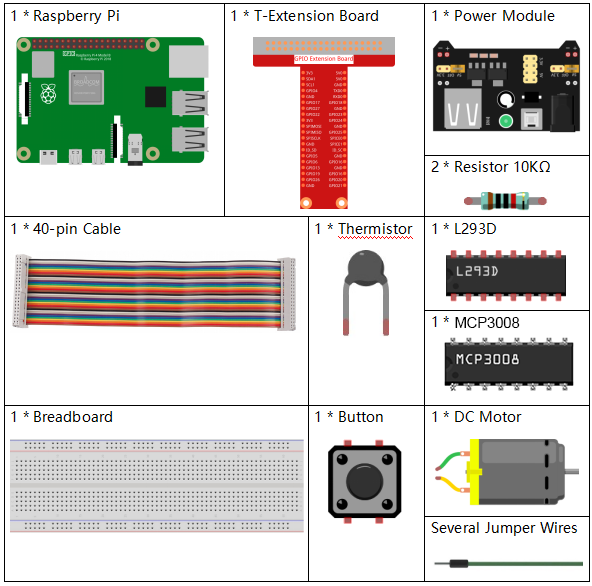
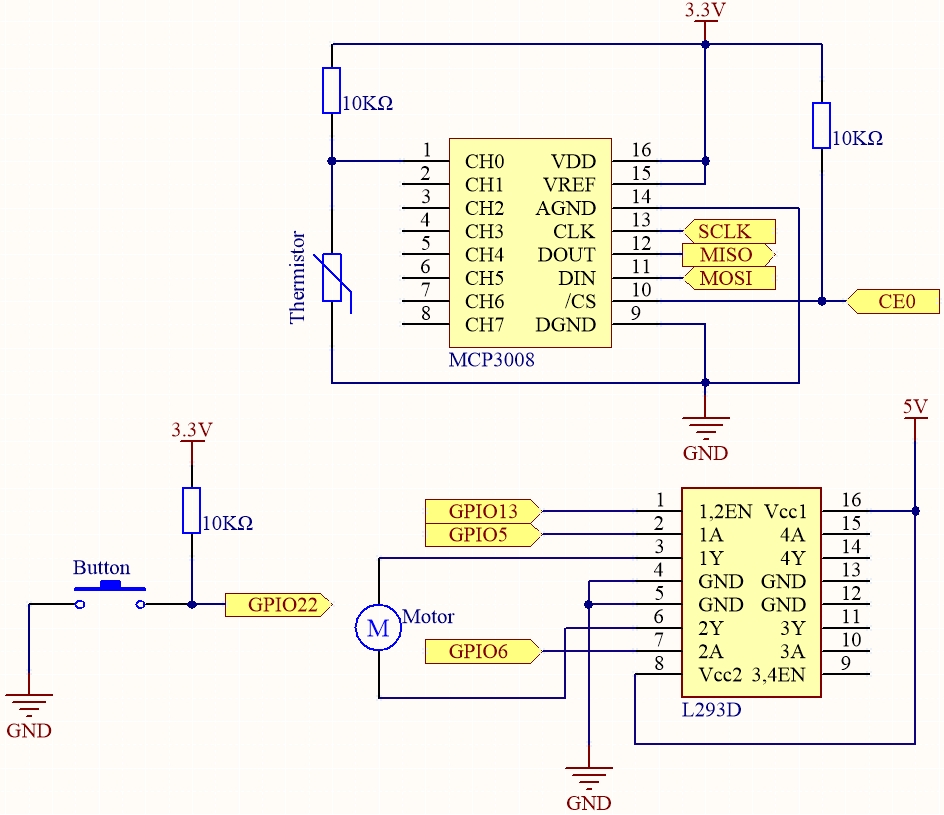
Diagrama esquemático
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procedimientos experimentales
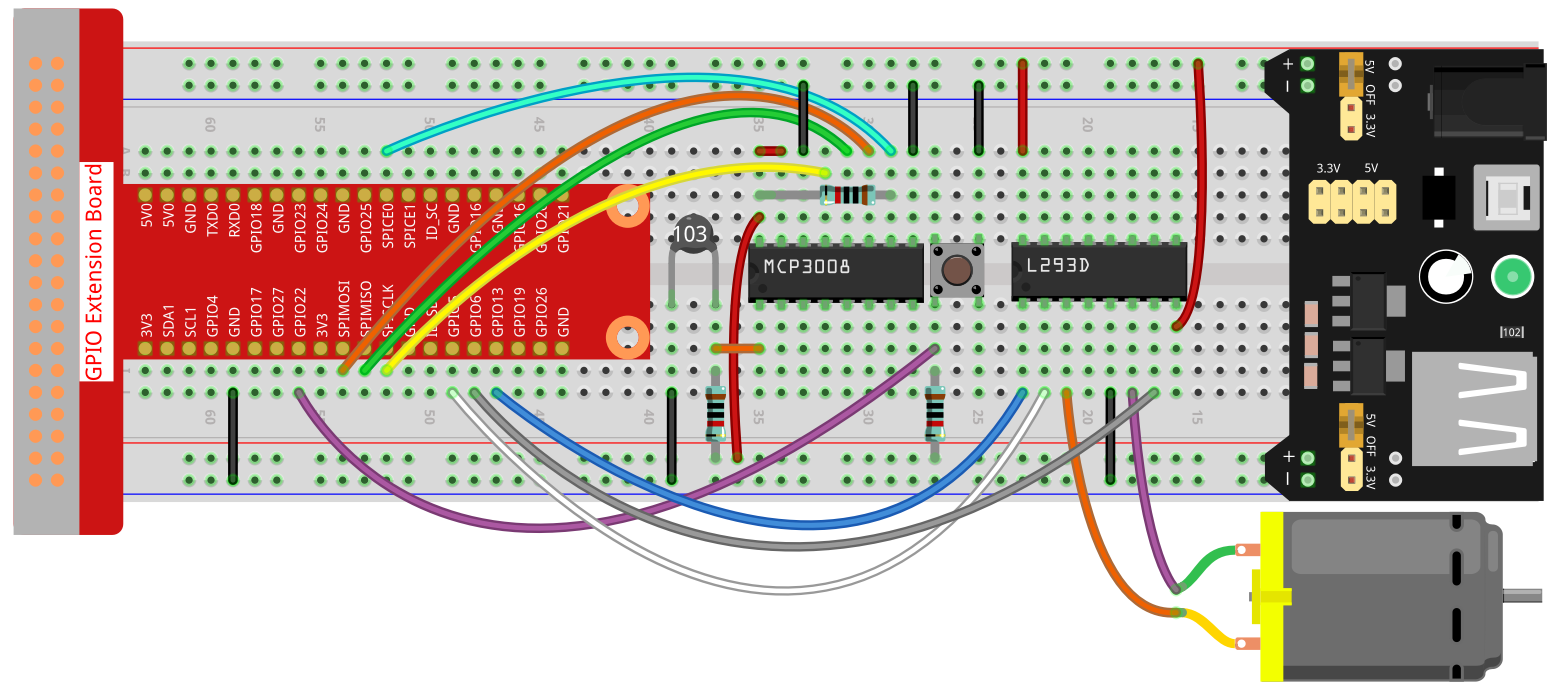
Paso 1: Construir el circuito.
Nota
El módulo de alimentación puede usar una batería de 9V con el conector para batería de 9V incluido en el kit.

Paso 2: Configurar la interfaz SPI e instalar la librería spidev (consulta Configuración de SPI para instrucciones detalladas).
Si ya has completado estos pasos, puedes saltar este paso.
Paso 3: Ir a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Paso 4: Ejecutar.
sudo python3 3.1.4-2_SmartFan_zero.py
Cuando se ejecute el código, inicia el ventilador presionando el botón. Cada vez que lo presiones, se ajustará una velocidad más alta o más baja. Hay 5 niveles de velocidad: 0~4. Cuando se establece en el 4to nivel de velocidad y presionas el botón, el ventilador se detiene con velocidad 0.
Cuando la temperatura suba o baje más de 2℃, la velocidad se ajustará automáticamente un nivel más rápido o más lento.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código de abajo.
Antes de eso, debes ir a la ruta del código fuente como davinci-kit-for-raspberry-pi/python-pi5.
Después de modificarlo, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import spidev
import math
# Inicializar SPI para MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0 (GPIO8 / pin físico 24)
spi.max_speed_hz = 1000000 # 1 MHz
# Inicializar pines GPIO para el botón y control del motor
BtnPin = Button(22) # GPIO22 (pin físico 15)
motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13
# Variables para el nivel de velocidad del motor y seguimiento de temperaturas
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
"""
Lee valor analógico del canal MCP3008 (0–7).
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
"""
Lee y calcula la temperatura actual desde el sensor.
Retorna:
float: Temperatura en Celsius.
"""
analogVal = read_adc(0) # Termistor conectado a CH0
Vr = 3.3 * analogVal / 1023.0 # Sistema de 3.3V
Rt = 10000.0 * Vr / (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Ajusta la velocidad del motor según el nivel.
Args:
level (int): Nivel de velocidad deseado.
Retorna:
int: Nivel ajustado de velocidad.
"""
if level == 0:
motor.stop()
return 0
if level >= 4:
level = 4
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Cambia el nivel de velocidad del motor al presionar el botón y actualiza la temperatura de referencia.
"""
global level, currentTemp, markTemp
print("Botón presionado")
level = (level + 1) % 5
markTemp = currentTemp
# Vincular el evento de pulsación de botón con la función changeLevel
BtnPin.when_pressed = changeLevel
def main():
"""
Función principal para monitorear y responder a cambios de temperatura.
"""
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
sleep(0.2)
# Ejecutar la función principal y manejar interrupción por teclado
try:
main()
except KeyboardInterrupt:
motor.stop()
spi.close()
Explicación del código
Importa librerías para control de motor y botón, comunicación SPI con MCP3008 y cálculos matemáticos.
gpiozerose usa para controlar dispositivos GPIO,spidevpara SPI, ymathpara calcular la temperatura a partir de la resistencia.#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import spidev import math
Inicializa comunicación SPI en bus 0, dispositivo 0 (CE0), conectado al MCP3008.
spi = spidev.SpiDev() spi.open(0, 0) # Bus 0, CE0 (GPIO8 / pin físico 24) spi.max_speed_hz = 1000000 # 1 MHz
Configura GPIO22 como entrada para el botón y establece los pines del motor (GPIO5 hacia adelante, GPIO6 hacia atrás, GPIO13 enable). También define variables globales para el seguimiento de velocidad y temperatura.
BtnPin = Button(22) motor = Motor(forward=5, backward=6, enable=13) level = 0 currentTemp = 0 markTemp = 0
Define función para leer valores analógicos de un canal MCP3008 mediante SPI. Devuelve un entero de 10 bits (0–1023).
def read_adc(channel): ... return value
Función para leer la temperatura desde el termistor, convirtiendo el valor ADC a voltaje, luego a resistencia y finalmente a Celsius usando la aproximación de Steinhart-Hart.
def temperature(): ... return Cel
Función para controlar la velocidad del motor según el nivel (0–4). Nivel 0 detiene el motor, y niveles 1–4 ajustan la velocidad PWM proporcionalmente.
def motor_run(level): ... return level
Manejador de evento para el botón que incrementa el nivel de velocidad y actualiza la temperatura de referencia.
def changeLevel(): ... BtnPin.when_pressed = changeLevel
Bucle principal que compara la temperatura actual con la referencia y ajusta el nivel del motor si la diferencia es de ±2°C. Actualiza el motor en cada ciclo y agrega un retardo.
def main(): ... sleep(0.2)
Ejecuta la función principal en un bloque try-except para manejar interrupción por teclado, deteniendo el motor y cerrando SPI de forma segura.
try: main() except KeyboardInterrupt: motor.stop() spi.close()