Nota
Hola, ¡bienvenidos a la comunidad de entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros apasionados.
¿Por qué unirte?
Soporte Experto: Resuelve problemas postventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Obtén acceso anticipado a anuncios y adelantos de nuevos productos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones en días especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
3.1.10 Alarma de Emergencia
Introducción
En este proyecto, crearemos un dispositivo de alarma manual. Puedes reemplazar el interruptor de palanca con un termistor o un sensor fotosensible para crear una alarma de temperatura o de luz.
Componentes
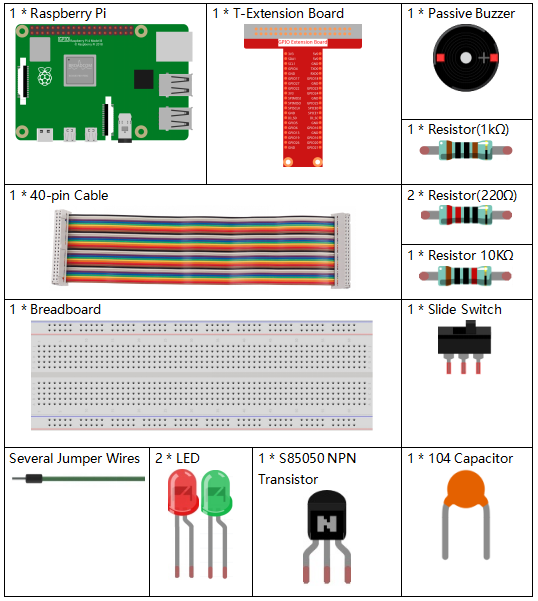
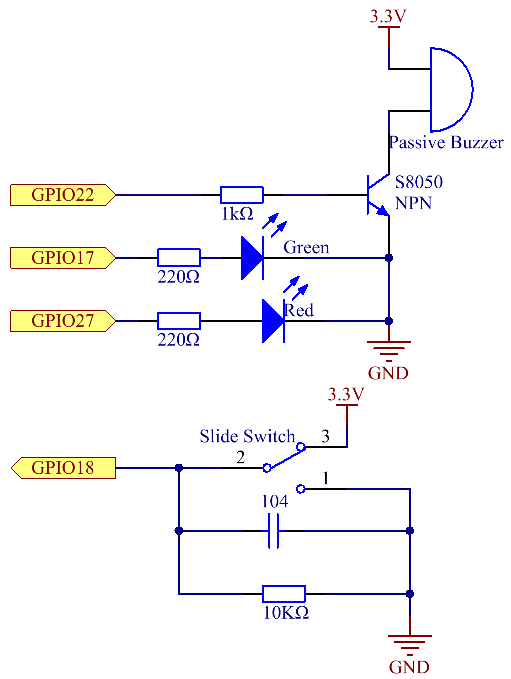
Diagrama de Circuito
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procedimientos Experimentales
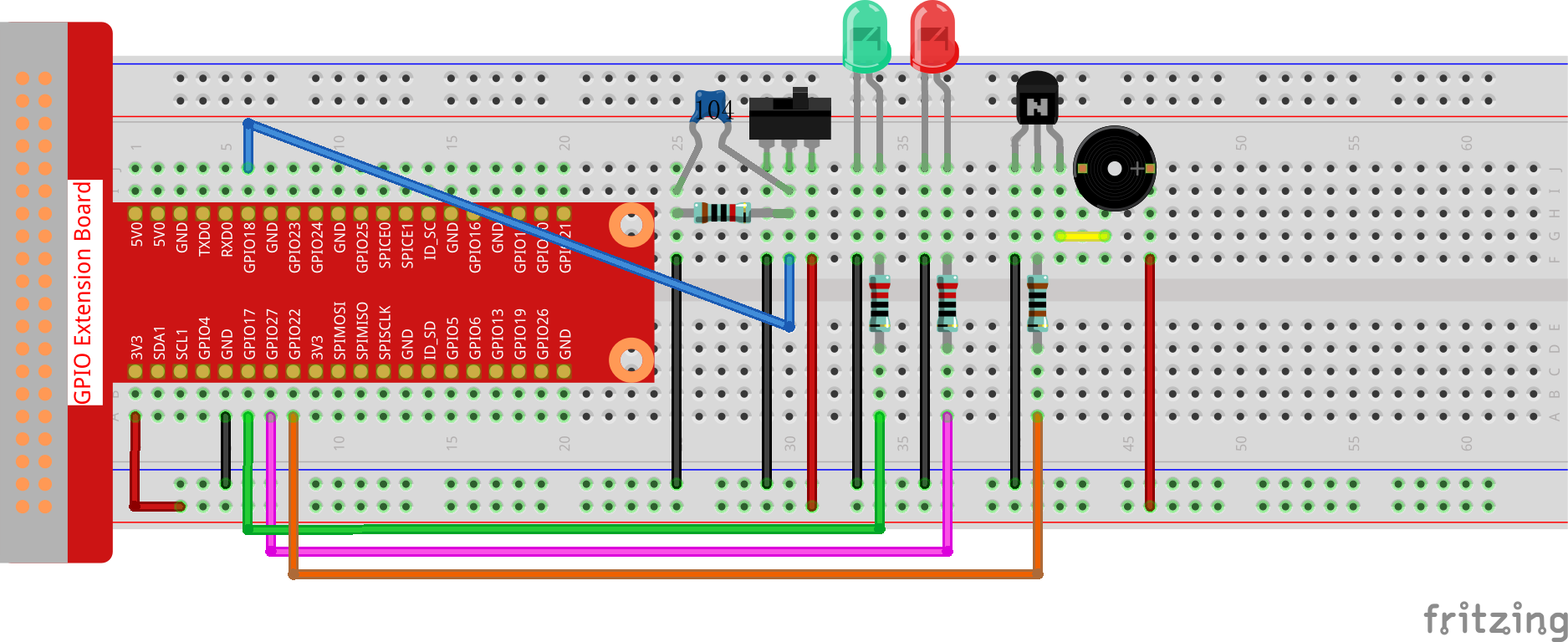
Paso 1: Construye el circuito.
Paso 2: Cambia de directorio.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.10/
Paso 3: Compila el código.
gcc 3.1.10_AlarmBell.c -lwiringPi -lpthread
Paso 4: Ejecuta el archivo.
sudo ./a.out
Al iniciar el programa, el interruptor de palanca se moverá a la derecha, y el zumbador emitirá sonidos de alarma. Al mismo tiempo, los LEDs rojo y verde parpadearán a una frecuencia determinada.
Nota
Si no funciona después de ejecutar el código o aparece el mensaje de error: "wiringPi.h: No such file or directory", consulta ¿El código en C no funciona?.
Explicación del Código
#include <pthread.h>
En este código, se usa una nueva biblioteca, pthread.h, que es un conjunto de librerías para manejo de hilos y permite implementar multithreading. Se agrega el parámetro -lpthread en la compilación para el trabajo independiente de los LEDs y el zumbador.
void *ledWork(void *arg){
while(1)
{
if(flag==0){
pthread_exit(NULL);
}
digitalWrite(ALedPin,HIGH);
delay(500);
digitalWrite(ALedPin,LOW);
digitalWrite(BLedPin,HIGH);
delay(500);
digitalWrite(BLedPin,LOW);
}
}
La función ledWork() establece el estado de trabajo de los 2 LEDs: mantiene encendido el LED verde durante 0,5s y luego lo apaga; de manera similar, enciende el LED rojo durante 0,5s y luego lo apaga.
void *buzzWork(void *arg){
while(1)
{
if(flag==0){
pthread_exit(NULL);
}
if((note>=800)||(note<=130)){
pitch = -pitch;
}
note=note+pitch;
softToneWrite(BeepPin,note);
delay(10);
}
}
La función buzzWork() establece el estado de trabajo del zumbador. Aquí, la frecuencia se ajusta entre 130 y 800, aumentando o disminuyendo en intervalos de 20.
void on(){
flag = 1;
if(softToneCreate(BeepPin) == -1){
printf("setup softTone failed !");
return;
}
pthread_t tLed;
pthread_create(&tLed,NULL,ledWork,NULL);
pthread_t tBuzz;
pthread_create(&tBuzz,NULL,buzzWork,NULL);
}
En la función on():
Define la marca "flag=1", que indica el inicio del hilo de control.
Crea un pin de tono controlado por software BeepPin.
Crea dos hilos separados para que los LEDs y el zumbador funcionen al mismo tiempo.
pthread_t tLed: Declara un hilo tLed.
pthread_create(&tLed,NULL,ledWork,NULL): Crea el hilo con el siguiente prototipo:
int pthread_create(pthread_t *restrict tidp,const pthread_attr_t *restrict_attr,void*(start_rtn)(void),void *restrict arg);
Valor de Retorno
Si tiene éxito, retorna 0; de lo contrario, retorna el número de error -1.
Parámetros
void off(){
flag = 0;
softToneStop(BeepPin);
digitalWrite(ALedPin,LOW);
digitalWrite(BLedPin,LOW);
}
La función off() define "flag=0" para salir de los hilos ledWork y buzzWork, y luego apaga el zumbador y los LEDs.
int main(){
setup();
int lastState = 0;
while(1){
int currentState = digitalRead(switchPin);
if ((currentState == 1)&&(lastState==0)){
on();
}
else if((currentState == 0)&&(lastState==1)){
off();
}
lastState=currentState;
}
return 0;
}
main() contiene todo el proceso del programa: primero lee el valor del interruptor de palanca; si el interruptor se mueve hacia la derecha (la lectura es 1), se llama a la función on(), el zumbador emite sonidos de alarma y los LEDs rojo y verde parpadean. De lo contrario, el zumbador y los LEDs permanecen apagados.