注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiast Community on Facebookへようこそ!他の愛好家と一緒に、Raspberry Pi、Arduino、ESP32の世界により深く入り込みましょう。
参加する理由
専門家サポート: 購入後の問題や技術的な課題を、コミュニティと私たちのチームの助けを借りて解決します。
学習と共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行プレビューに早期アクセスできます。
特別割引: 最新製品を特別割引でお楽しみいただけます。
季節限定キャンペーンとプレゼント: プレゼント企画やホリデーキャンペーンに参加しましょう。
👉 一緒に発見し、創造する準備はできましたか? [こちら] をクリックして、今すぐ参加しましょう!
(Example) パン・チルトカメラ付き 宿題採点デモ
はじめに
このプロジェクトでは、コンピュータビジョン、人工知能、ロボティクスを組み合わせた対話型の AI 宿題採点アシスタント を作成します。システムは次のことを行います:
Raspberry Pi カメラで、手書きまたは印刷された宿題の問題を 撮影 します
OpenAI の GPT-4 Vision モデルで内容を 解析 し、解答が正しいかを判定します
サーボ制御のパン・チルトヘッド動作で 物理的なフィードバック を返します:
正解なら うなずく
不正解なら 首を振る
1 回のボタン押下で動作する シンプルなインタラクション を採用しています
このデモは、AI が物理世界と連携できることを示す例であり、宿題の正誤をその場で視覚的にフィードバックする、学習向けの魅力的なツールになります。
他の LLM モジュールやハードウェア部品を組み合わせて、独自の AI 支援学習デバイスを作ることもできます。以下も参照してください:
必要なもの
このプロジェクトに必要な部品は以下の通りです:
COMPONENT |
PURCHASE LINK |
|---|---|
Pan-Tilt |
|
- |
|
Raspberry Pi |
- |
Homework sample (printed or handwritten) |
- |
ハードウェアのセットアップ
カメラモジュールを便利に使うために、パン・チルトの組み立て(カメラ用) の組み立てを推奨します。
注釈
パン・チルトを組み立てると一部のピンが隠れる場合があります。そのため、カメラを使用するときだけ組み立てるか、組み立て後に外側へ配置することを推奨します。

APIキーの取得と保存
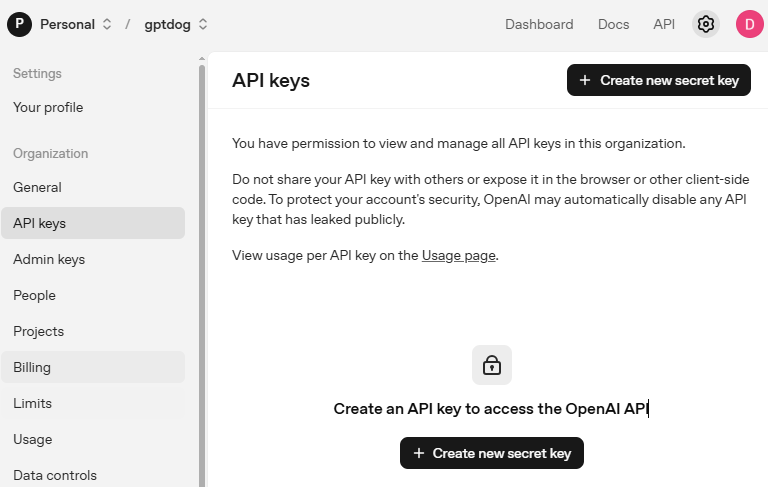
OpenAI Platform にアクセスしてログインします。 API keys ページで Create new secret key をクリックします。
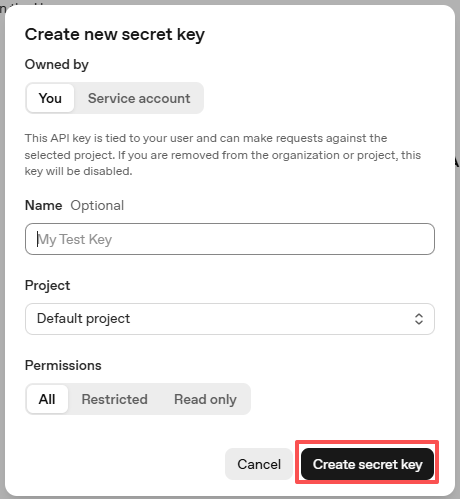
必要事項(Owner、Name、Project、必要に応じて権限)を入力し、 Create secret key をクリックします。
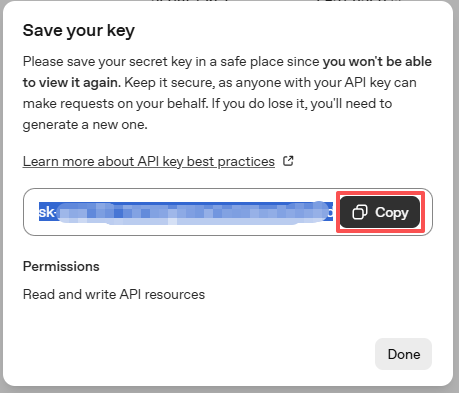
キーが作成されたら、すぐにコピーしてください。後から再表示できません。紛失した場合は新しく作成し直す必要があります。
プロジェクトフォルダ(例:
/)内にsecret.pyというファイルを作成します:cd ~/ai-lab-kit/llm sudo nano secret.py
ファイルにキーを次のように貼り付けます:
# secret.py # Store secrets here. Never commit this file to Git. OPENAI_API_KEY = "sk-xxx"
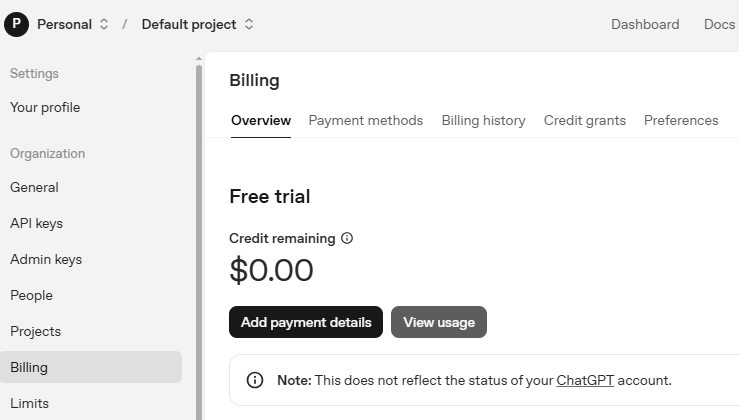
請求設定の有効化と利用可能モデルの確認
キーを使用する前に、OpenAI アカウントの Billing ページで支払い情報を追加し、少額のクレジットをチャージしてください。
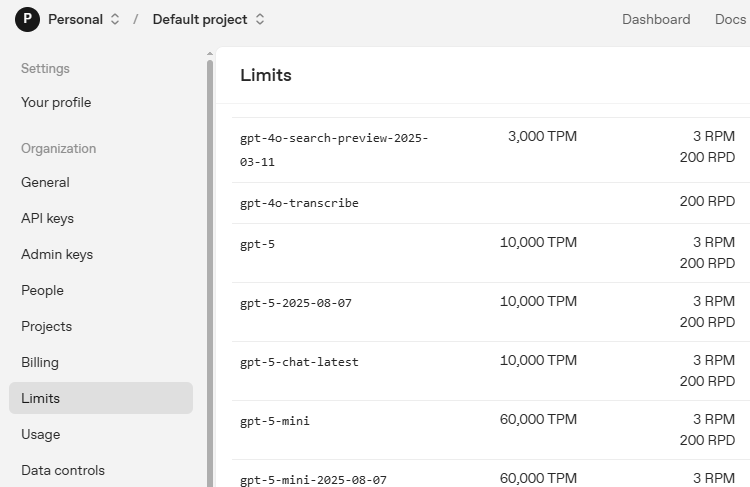
続いて Limits ページで、アカウントで利用可能なモデルを確認し、コードで使用する正確なモデルIDをコピーします。
コードの実行
宿題サンプルを用意する:
簡単な算数問題と答えを手書き、または印刷します
例:"5 + 3 = 8"(正解)または "5 + 3 = 7"(不正解)
文字が読み取れるよう、はっきり書く/印刷してください
プログラムを実行する:
cd ~/ai-lab-kit/llm python3 llm_openai_homework.py
画面の指示に従う:
宿題用紙をカメラの下に置く
Fusion HAT+ の User Button(USR)を押す
サーボの反応を確認する
想定される出力:
HOMEWORK GRADING DEMO ================================================== Instructions: 1. Place a homework question under the camera 2. Make sure the question AND answer are visible 3. Press the User Button (USR) on Fusion HAT to grade 4. The camera will take a photo 5. AI will grade the answer 6. Servo will nod (correct) or shake (incorrect) ================================================== Waiting for button press... ================================================== Button pressed - Starting grading process Taking photo... Photo captured Sending to AI for grading... AI response: CORRECT Answer is correct - nodding head ==================================================
コード
以下は宿題採点デモの Python スクリプト全体です:
#!/usr/bin/env python3
"""
Homework Grading Demo with Pan-Tilt Camera
Press User Button to take photo, LLM grades, servo nods or shakes
"""
import time
from fusion_hat.llm import OpenAI
from fusion_hat.servo import Servo
from fusion_hat.user_button import UserButton
from picamera2 import Picamera2, Preview
# ========== LLM SETTINGS ==========
# Create a secret.py file with: OPENAI_API_KEY = "your-api-key-here"
try:
from secret import OPENAI_API_KEY
except ImportError:
print("ERROR: Please create a secret.py file with your OpenAI API key")
print("Example content: OPENAI_API_KEY = 'sk-...'")
exit()
# LLM instructions for grading
INSTRUCTIONS = """You are a homework grading assistant.
When you see a photo of a homework question with an answer,
determine if the answer is correct or incorrect.
Respond with ONLY ONE WORD:
- If the answer is CORRECT, respond: "CORRECT"
- If the answer is INCORRECT, respond: "INCORRECT"
Do not provide any other text, explanations, or justifications.
Only respond with "CORRECT" or "INCORRECT"."""
# Initialize LLM
llm = OpenAI(
api_key=OPENAI_API_KEY,
model="gpt-4o"
)
# Set LLM settings
llm.set_max_messages(5)
llm.set_instructions(INSTRUCTIONS)
# ========== HARDWARE SETTINGS ==========
PAN_CHANNEL = 2 # Horizontal servo for shaking head
TILT_CHANNEL = 3 # Vertical servo for nodding head
# Servo center positions
TILT_CENTER = 0 # Looking straight ahead
PAN_CENTER = 0 # Center position
# ========== INITIALIZE HARDWARE ==========
print("Initializing Homework Grading Demo...")
print("-" * 50)
# Initialize servos
pan_servo = Servo(PAN_CHANNEL)
tilt_servo = Servo(TILT_CHANNEL)
# Center servos
tilt_servo.angle(TILT_CENTER)
pan_servo.angle(PAN_CENTER)
time.sleep(1)
print("Servos ready")
# Initialize camera
camera = Picamera2()
camera_config = camera.create_preview_configuration(main={"size": (1280, 720)})
camera.configure(camera_config)
camera.start_preview(Preview.QT)
camera.start()
time.sleep(2)
print("Camera ready")
# Initialize user button
user_button = UserButton()
print("User button ready")
print("-" * 50)
# ========== SERVO MOVEMENT FUNCTIONS ==========
def nod_head():
"""
Nodding head movement for "correct"
"""
# Look down
tilt_servo.angle(15)
time.sleep(0.2)
# Look up
tilt_servo.angle(-10)
time.sleep(0.2)
# Return to center
tilt_servo.angle(TILT_CENTER)
def shake_head():
"""
Shaking head movement for "incorrect"
"""
# Look left
pan_servo.angle(-20)
time.sleep(0.15)
# Look right
pan_servo.angle(20)
time.sleep(0.15)
# Look left again
pan_servo.angle(-15)
time.sleep(0.15)
# Return to center
pan_servo.angle(PAN_CENTER)
# ========== GRADING FUNCTION ==========
def grade_homework():
"""
Main grading function: take photo, send to LLM, move servo
"""
print("\nTaking photo...")
# Capture image
img_path = './homework.jpg'
camera.capture_file(img_path)
print("Photo captured")
# Send to LLM for grading
print("Sending to AI for grading...")
prompt = "Look at this homework question and answer. Is the answer correct? Respond with only one word: 'CORRECT' or 'INCORRECT'."
response = llm.prompt(prompt, image_path=img_path)
response_text = response.strip().upper()
print(f"AI response: {response_text}")
# Move servo based on response
if "INCORRECT" in response_text:
print("Answer is incorrect - shaking head")
shake_head()
elif "CORRECT" in response_text:
print("Answer is correct - nodding head")
nod_head()
else:
print(f"Unexpected response: {response_text}")
# ========== BUTTON CALLBACK ==========
def on_button_click():
"""
Called when user button is pressed
"""
print("\n" + "=" * 50)
print("Button pressed - Starting grading process")
grade_homework()
print("=" * 50)
# ========== MAIN DEMO ==========
def main():
"""
Main demo function
"""
print("\nHOMEWORK GRADING DEMO")
print("=" * 50)
print("Instructions:")
print("1. Place a homework question under the camera")
print("2. Make sure the question AND answer are visible")
print("3. Press the User Button (USR) on Fusion HAT to grade")
print("4. The camera will take a photo")
print("5. AI will grade the answer")
print("6. Servo will nod (correct) or shake (incorrect)")
print("=" * 50)
print("\nWaiting for button press...")
# Set button callback
user_button.set_on_click(on_button_click)
# Keep program running
try:
while True:
time.sleep(0.1)
except KeyboardInterrupt:
print("\nDemo stopped by user")
# ========== CLEANUP ==========
def cleanup():
"""
Clean up resources
"""
print("\nCleaning up...")
# Return servos to center
tilt_servo.angle(TILT_CENTER)
pan_servo.angle(PAN_CENTER)
# Stop camera
camera.stop()
print("Demo ended")
# ========== RUN DEMO ==========
if __name__ == "__main__":
try:
main()
finally:
cleanup()
コードの理解
LLM の設定とセットアップ
システムは Vision 機能を備えた OpenAI の GPT-4o を使用して画像を解析します:
# Import and initialize the LLM from fusion_hat.llm import OpenAI llm = OpenAI(api_key=OPENAI_API_KEY, model="gpt-4o") # Set specific instructions for consistent responses INSTRUCTIONS = """You are a homework grading assistant...""" llm.set_instructions(INSTRUCTIONS) # Limit conversation history to manage tokens llm.set_max_messages(5)
ハードウェアの初期化
3 つのハードウェア要素(サーボ、カメラ、ボタン)を初期化します:
# Servo control for pan-tilt mechanism pan_servo = Servo(PAN_CHANNEL) # Channel 2 for horizontal movement tilt_servo = Servo(TILT_CHANNEL) # Channel 3 for vertical movement # Camera setup with preview camera = Picamera2() camera_config = camera.create_preview_configuration(main={"size": (1280, 720)}) camera.configure(camera_config) camera.start_preview(Preview.QT) camera.start() # User button for interaction user_button = UserButton()
サーボのアニメーション関数
うなずき/首振りを自然に見せる動きです:
def nod_head(): """Nodding head movement for 'correct' answers""" tilt_servo.angle(15) # Look down time.sleep(0.2) tilt_servo.angle(-10) # Look up time.sleep(0.2) tilt_servo.angle(TILT_CENTER) # Return to center def shake_head(): """Shaking head movement for 'incorrect' answers""" pan_servo.angle(-20) # Look left time.sleep(0.15) pan_servo.angle(20) # Look right time.sleep(0.15) pan_servo.angle(-15) # Look left again time.sleep(0.15) pan_servo.angle(PAN_CENTER) # Return to center
画像撮影と AI 解析
採点のメインワークフロー:
def grade_homework(): # Capture image from camera img_path = './homework.jpg' camera.capture_file(img_path) # Send image to LLM with specific prompt prompt = "Look at this homework question and answer..." response = llm.prompt(prompt, image_path=img_path) response_text = response.strip().upper() # Interpret response and trigger appropriate servo movement if "INCORRECT" in response_text: shake_head() elif "CORRECT" in response_text: nod_head()
ボタンイベントの処理
ユーザー操作はコールバックで完結します:
def on_button_click(): print("Button pressed - Starting grading process") grade_homework() # Assign callback to button user_button.set_on_click(on_button_click)
メインループ
ボタン押下を待つだけの最小構成です:
def main(): print("Waiting for button press...") user_button.set_on_click(on_button_click) # Keep program running until interrupted try: while True: time.sleep(0.1) # Low CPU usage wait except KeyboardInterrupt: print("\nDemo stopped by user")
リソースのクリーンアップ
終了時にサーボとカメラを安全に停止します:
def cleanup(): # Return servos to neutral position tilt_servo.angle(TILT_CENTER) pan_servo.angle(PAN_CENTER) # Stop camera camera.stop()
トラブルシューティング
No module named
picamera2必要なライブラリをインストールしてください:
sudo apt update sudo apt install python3-picamera2
Camera not detected
カメラの接続を確認:フラットケーブルが正しい向きで確実に挿入されているか
カメラが有効か確認:
sudo raspi-config→ Interface Options → Cameraカメラ単体テスト:
libcamera-hello
Servos not moving
電源接続を確認:サーボには 5V 電源が必要です
サーボのチャンネルがコードと一致しているか確認(Channels 2 と 3)
単体テスト:角度指定でサーボが動くか確認してください
AI not responding or error
secret.pyの API キーが正しいか確認してくださいネット接続を確認:
ping 8.8.8.8OpenAI アカウントにクレジットがあるか確認してください
モデル "gpt-4o" が利用可能か確認してください
Incorrect servo movements
pan と tilt のサーボが入れ替わっていないか確認してください
nod_head()とshake_head()の角度値を調整してくださいセンター位置のキャリブレーションが必要な場合があります
Image too blurry or dark
宿題用紙に十分な照明を当ててください
調整可能な場合はフォーカスを調整してください
用紙から 15〜30cm 程度の距離にカメラを配置してください
手書きは濃いペン/マーカーで書くと読み取りやすくなります
Button not responding
ボタン押下時に User Button の LED が点灯するか確認してください
コールバックが登録されているか確認してください
簡単な print を入れて押下検出を確認してください
AI returns unexpected response
コード内の prompt の書式を確認してください
画像に「問題」と「答え」の両方がはっきり写っているか確認してください
まずは簡単な四則演算でテストしてください
この宿題採点デモは、AI のビジョンモデルが物理ハードウェアと連携して学習体験を拡張できることを示します。デジタルな知能と手触りのあるフィードバックを融合し、教育用途に魅力的な体験を提供します。