Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [ ici ] et rejoignez-nous aujourd’hui !
3.2 Mouvement¶
Ce projet est basé sur 3.1 Tester la Voiture pour faire bouger la voiture dans toutes les directions.
Avant de commencer la programmation, revoyons le principe de fonctionnement du module L9110.
Voici la table de vérité du Moteur B :
B-1A |
B-1B(B-2A) |
État du Moteur B |
|---|---|---|
1 |
0 |
Rotation dans le sens des aiguilles d’une montre |
0 |
1 |
Rotation dans le sens inverse des aiguilles d’une montre |
0 |
0 |
Freinage |
1 |
1 |
Arrêt |
Voici la table de vérité du Moteur A :
A-1A |
A-1B |
État du Moteur A |
|---|---|---|
1 |
0 |
Rotation dans le sens des aiguilles d’une montre |
0 |
1 |
Rotation dans le sens inverse des aiguilles d’une montre |
0 |
0 |
Freinage |
1 |
1 |
Arrêt |
Programmation¶
Créez maintenant des blocs pour faire avancer, reculer, tourner à gauche, tourner à droite et arrêter la voiture respectivement.
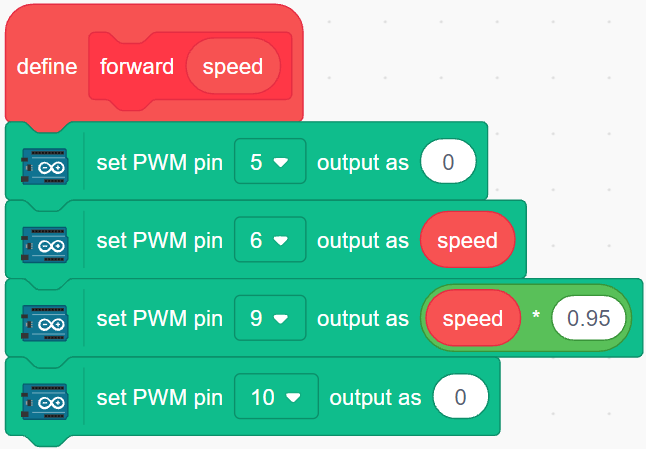
1. Avancer
Le moteur droit tourne dans le sens des aiguilles d’une montre et le moteur gauche dans le sens inverse pour faire avancer la voiture.
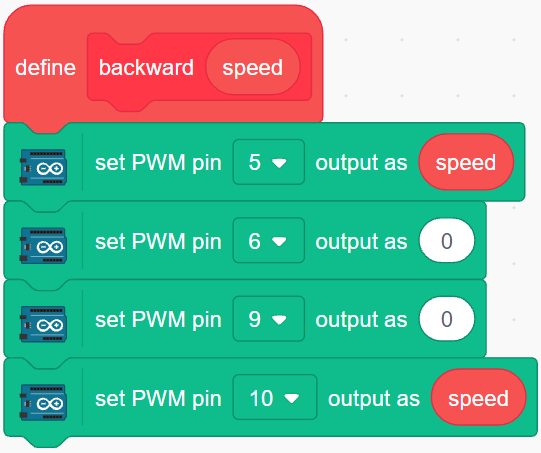
2. Reculer
Le recul est juste l’opposé, le moteur droit doit tourner dans le sens inverse des aiguilles d’une montre, le moteur gauche dans le sens des aiguilles d’une montre.
3. Tourner à Gauche
Les moteurs gauche et droit tournent dans le sens des aiguilles d’une montre en même temps pour faire tourner la voiture à gauche.

4. Tourner à Droite
De même, faites tourner les moteurs gauche et droit dans le sens inverse des aiguilles d’une montre pour tourner la voiture à droite.

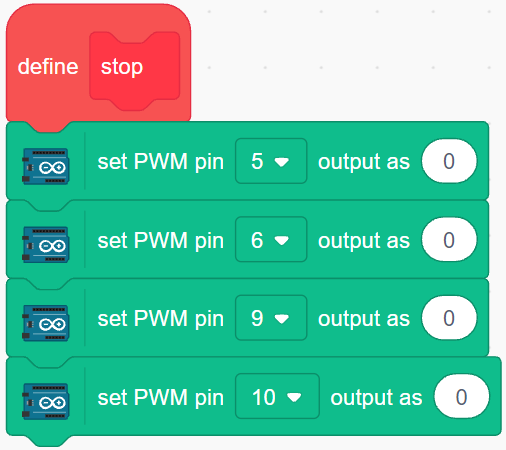
5. Arrêt
Arrêtez la voiture en réglant tous les moteurs à 0.
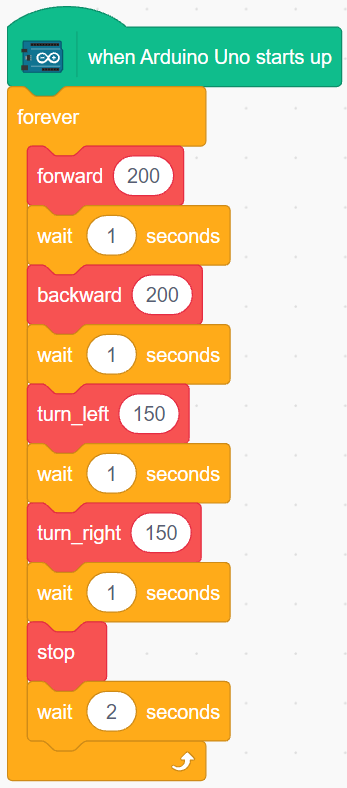
6. Faire bouger la voiture
Faites bouger la voiture en avant, en arrière, à gauche et à droite pendant 1 seconde, puis arrêtez. Comme tous les blocs sont placés dans le bloc [Forever], vous verrez que la voiture répète les actions ci-dessus.