舵机调零¶
为确保舵机已正确设置为 0°,首先将摇臂轻轻插入舵机轴,然后将摇臂轻轻旋转到不同的角度。

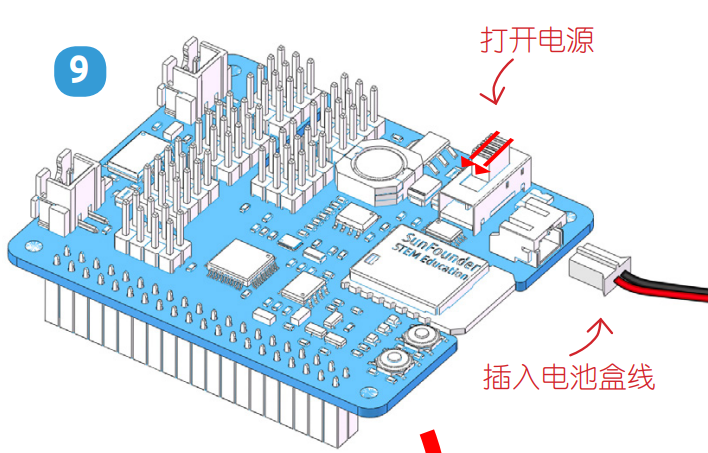
按照组装折页上的提示,插入电池盒线,将电源开关拨向ON的位置。等待1-2分钟,会有声音提示树莓派启动成功。
现在,运行
examples/文件夹中的servo_zeroing.py.cd /home/pi/picrawler/examples sudo python3 servo_zeroing.py
注解
如果报错,请尝试重新启用树莓派的的 I2C 端口,请参阅: I2C 配置.
接下来,将舵机线插入 P11 端口,如下所示:
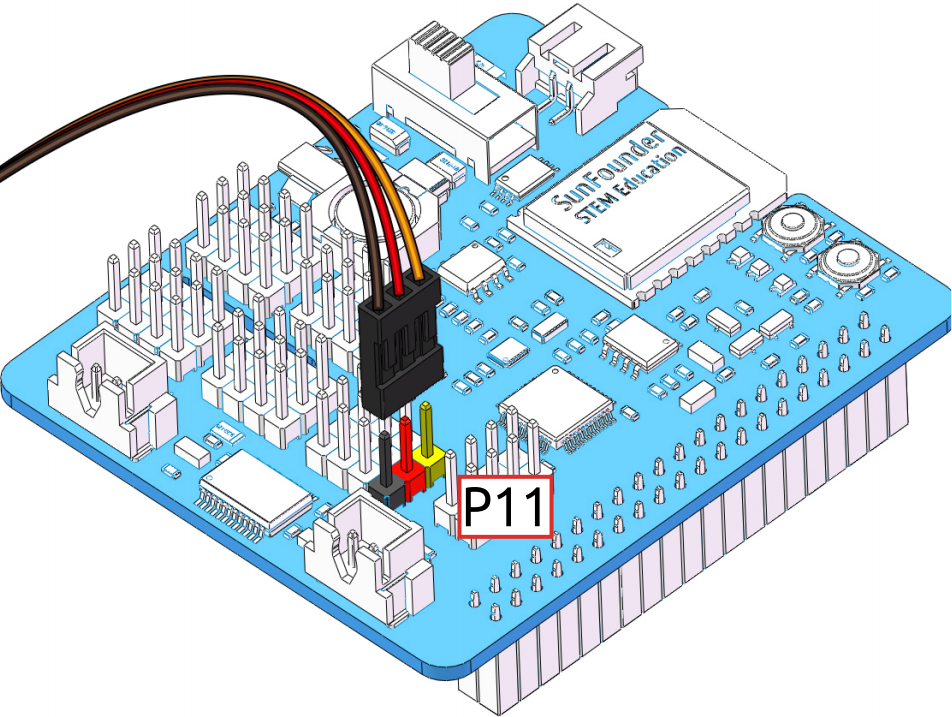
此时你会看到舵机臂转动到特定的位置(0°)。 如果伺服臂没有返回到 0°,请按 RST 按钮重新启动Robot HAT。
现在你就可以按照组装折页上的指示继续安装。
注解
在用舵机螺丝固定该舵机前,不要拔出该舵机线,可在固定完之后拔出。
不要在上电情况下随意转动舵机以免损坏;如果舵机轴插入的角度不对,需把舵机拔出再重新插入。
在组装每个舵机之前,都需要将舵机电缆插入 P11 并打开电源以将它的角度设置为 0°。