调整姿势¶
在这个例子中,我们使用键盘来控制 PiCrawler 的脚来摆出我们想要的姿势。
您可以按空格键打印出当前坐标值。当您为 PiCrawler 创建独特的动作时,这些坐标值会派上用场。
运行代码
cd /home/pi/picrawler/examples
sudo python3 do_single_leg.py
代码运行后,请根据终端弹出的提示进行操作。
按下1234来分别选择脚,
1:右前脚,2:左前脚,3:左后脚,4:右后脚按下
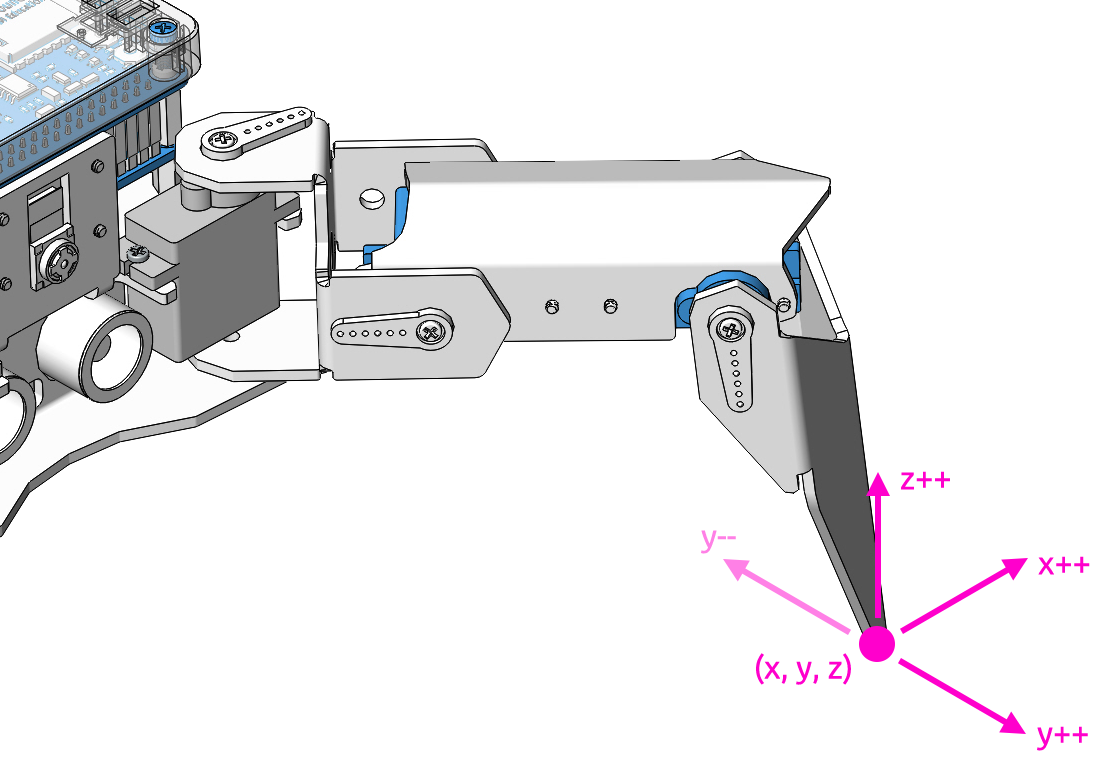
w,a,s,d,r,和f来慢慢控制PiCrawler的坐标值。按下
空格键来打印所有的坐标值。按下
esc来退出。
代码
from picrawler import Picrawler
from time import sleep
import readchar
crawler = Picrawler([10,11,12,4,5,6,1,2,3,7,8,9])
speed = 80
manual = '''
-------- PiCrawler Controller ---------
....... .......
<=| 2 |┌-┌┐┌┐-┐| 1 |=>
``````` ├ ┤ ```````
....... ├ ┤ .......
<=| 3 |└------┘| 4 |=>
``````` ```````
1: Select right front leg
2: Select left front leg
3: Select left rear leg
4: Select right rear leg
W: Y++ R: Z++
A: X-- F: Z--
S: Y--
D: X++ Esc: Quit
'''
legs_list = ['right front', 'left front', 'left rear', 'right rear']
def main():
leg = 0
speed = 80
step = 2
print(manual)
crawler.do_step('stand',speed)
sleep(0.2)
coordinate=crawler.current_step_all_leg_value()
def show_info():
print("\033[H\033[J",end='') # clear terminal windows
print(manual)
print('%s : %s'%(leg+1, legs_list[leg]))
print('coordinate: %s'%(coordinate))
show_info()
while True:
# readkey
key = readchar.readkey()
key = key.lower()
# select the leg
if key in ('1234'):
leg = int(key) - 1
show_info()
# move
elif key in ('wsadrf'):
if 'w' == key:
coordinate[leg][1]=coordinate[leg][1] + step
elif 's' == key:
coordinate[leg][1]=coordinate[leg][1] - step
elif 'a' == key:
coordinate[leg][0]=coordinate[leg][0] - step
elif 'd' == key:
coordinate[leg][0]=coordinate[leg][0] + step
elif 'r' == key:
coordinate[leg][2]=coordinate[leg][2] + step
elif 'f' == key:
coordinate[leg][2]=coordinate[leg][2] - step
crawler.do_single_leg(leg,coordinate[leg],speed)
sleep(0.1)
# coordinate=crawler.current_step_all_leg_value()
show_info()
# quit
elif key == readchar.key.CTRL_C or key in readchar.key.ESCAPE_SEQUENCES:
print("\n Quit")
break
sleep(0.05)
if __name__ == "__main__":
main()
这个怎么运作?
在这个项目中需要注意的是以下三个函数:
do_single_leg(leg,coordinate,speed)
do_single_leg(leg,coordinate,speed): 单独修改某条腿的坐标值。