情感机器人¶
这个例子展示了 PiCrawler 的几个有趣的自定义动作。
运行代码
cd /home/pi/picrawler/examples
sudo python3 emotional_robot.py
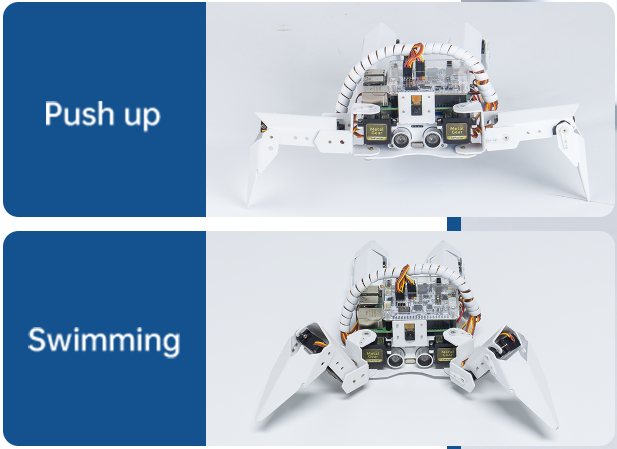
代码运行后,你会看到PiCrawler做一些有趣的动作,比如游泳,俯卧撑,摆手和摇摆。
代码
from picrawler import Picrawler
from time import sleep
crawler = Picrawler([10,11,12,4,5,6,1,2,3,7,8,9])
#crawler.set_offset([0,0,0,0,0,0,0,0,0,0,0,0])
def handwork(speed):
basic_step = []
basic_step = crawler.step_list.get("sit")
left_hand = crawler.mix_step(basic_step,0,[0,50,80])
right_hand = crawler.mix_step(basic_step,1,[0,50,80])
two_hand = crawler.mix_step(left_hand,1,[0,50,80])
crawler.do_step('sit',speed)
sleep(0.6)
crawler.do_step(left_hand,speed)
sleep(0.6)
crawler.do_step(two_hand,speed)
sleep(0.6)
crawler.do_step(right_hand,speed)
sleep(0.6)
crawler.do_step('sit',speed)
sleep(0.6)
def twist(speed):
new_step=[[50, 50, -80], [50, 50, -80],[50, 50, -80], [50, 50, -80]]
for i in range(4):
for inc in range(30,60,5):
rise = [50,50,(-80+inc*0.5)]
drop = [50,50,(-80-inc)]
new_step[i]=rise
new_step[(i+2)%4] = drop
new_step[(i+1)%4] = rise
new_step[(i-1)%4] = drop
crawler.do_step(new_step,speed)
##"[[right front], [left front], [left rear], [left rear]]")
def pushup(speed):
up=[[80, 0, -100], [80, 0, -100],[0, 120, -60], [0, 120, -60]]
down=[[80, 0, -30], [80, 0, -30],[0, 120, -60], [0, 120, -60]]
crawler.do_step(up,speed)
sleep(0.6)
crawler.do_step(down,speed)
sleep(0.6)
def swimming(speed):
for i in range(100):
crawler.do_step([[100-i,i,0],[100-i,i,0],[0,120,-60+i/5],[0,100,-40-i/5]],speed)
# main
def main():
speed = 100
swimming(speed)
pushup(speed)
handwork(speed)
twist(speed)
sleep(0.05)
if __name__ == "__main__":
main()