注釈
こんにちは!SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32に関心のある仲間と一緒にさらに深く学びましょう。
参加する理由
専門家のサポート: 購入後の問題や技術的な課題を、コミュニティやチームのサポートで解決できます。
学びと共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
特別なプレビュー: 新製品の発表や先行公開に早期アクセスできます。
特別割引: 新製品に対して限定割引を楽しめます。
祝祭プロモーションとプレゼント: プレゼントや祝祭プロモーションに参加できます。
👉 私たちと一緒に探求し、創造する準備はできましたか?[ここ]をクリックして、今すぐ参加しましょう!
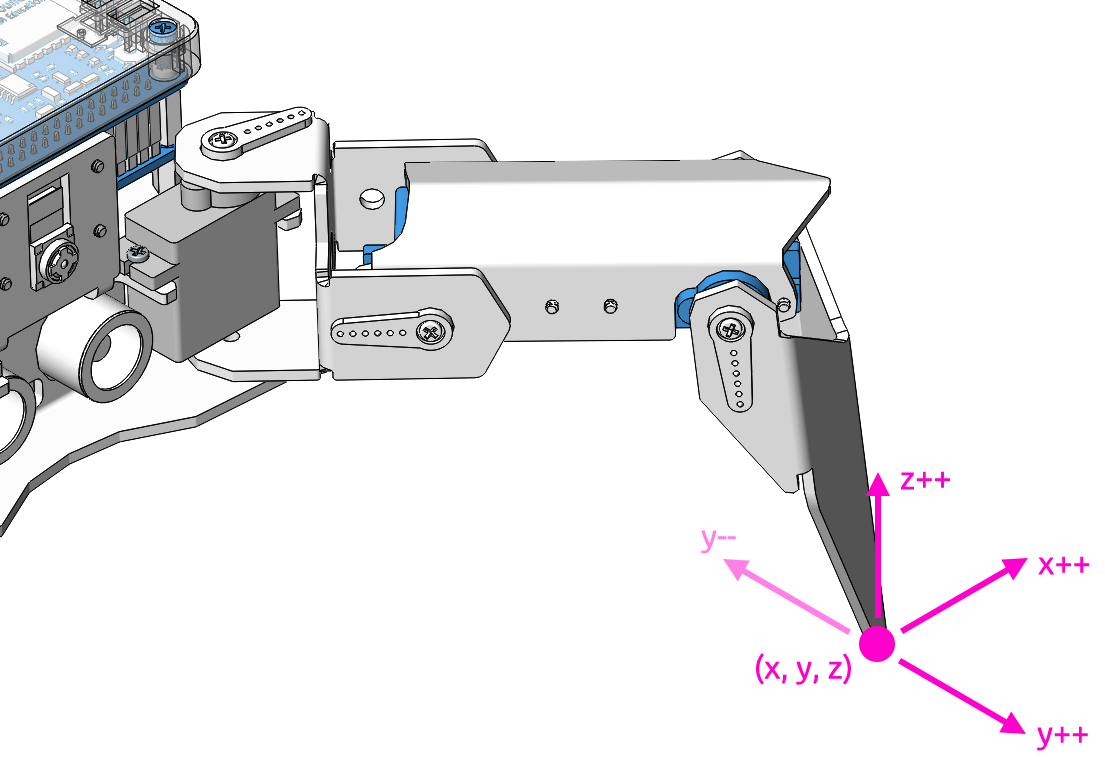
10. 姿勢調整
この例では、キーボードを使ってPiCrawlerの各足を個別に操作し、希望する姿勢を取らせます。
スペースバーを押すと、現在の座標値が表示されます。この座標値は、PiCrawlerの独自のアクションを作成する際に役立ちます。
コードの実行
cd ~/picrawler/examples
sudo python3 10_do_single_leg.py
コードが実行された後、ターミナルに表示されるプロンプトに従って操作を行ってください。
1234キーで足を個別に選択します。1: 右前足、2: 左前足、3: 左後足、4: 右後足w,a,s,d,r,fキーでPiCrawlerの座標値をゆっくりと制御できます。Ctrl+Cで終了します。
コード
#!/usr/bin/env python3
from picrawler import Picrawler
from time import sleep
import readchar
crawler = Picrawler()
SPEED = 80
STEP_SIZE = 2
manual = '''
-------- PiCrawler Controller ---------
....... .......
<=| 2 |┌-┌┐┌┐-┐| 1 |=>
``````` ├ ┤ ```````
....... ├ ┤ .......
<=| 3 |└------┘| 4 |=>
``````` ```````
1: Select right front leg
2: Select left front leg
3: Select left rear leg
4: Select right rear leg
W: Y++ R: Z++
A: X-- F: Z--
S: Y--
D: X++ Ctrl+C: Quit
'''
legs_list = ['right front', 'left front', 'left rear', 'right rear']
# Axis mapping for cleaner logic
move_map = {
'w': (1, +STEP_SIZE), # Y++
's': (1, -STEP_SIZE), # Y--
'a': (0, -STEP_SIZE), # X--
'd': (0, +STEP_SIZE), # X++
'r': (2, +STEP_SIZE), # Z++
'f': (2, -STEP_SIZE), # Z--
}
def clear_screen():
print("\033[H\033[J", end='')
def show_info(selected_leg, coordinate):
clear_screen()
print(manual)
print(f"Selected leg: {selected_leg + 1} - {legs_list[selected_leg]}")
print(f"Coordinate: {coordinate}")
def main():
selected_leg = 0
try:
print(manual)
# Stand up first
crawler.do_step('stand', 40)
sleep(0.5)
# Get current coordinates
coordinate = crawler.current_step_all_leg_value()
show_info(selected_leg, coordinate)
while True:
key = readchar.readkey().lower()
# Select leg
if key in ('1', '2', '3', '4'):
selected_leg = int(key) - 1
show_info(selected_leg, coordinate)
# Move selected leg
elif key in move_map:
axis, delta = move_map[key]
# Update coordinate
coordinate[selected_leg][axis] += delta
# Send updated position
crawler.do_single_leg(selected_leg, coordinate[selected_leg], SPEED)
sleep(0.1)
show_info(selected_leg, coordinate)
sleep(0.05)
except KeyboardInterrupt:
print("\nExiting safely...")
finally:
# Return to sitting position on exit
try:
crawler.do_step('sit', 40)
sleep(1)
except Exception:
pass
print("Robot is now sitting. Program ended.")
if __name__ == "__main__":
main()
current_step_all_leg_value(): すべての足の座標値を返します。do_single_leg(leg,coordinate[leg],speed): 特定の足の座標値を個別に変更します。