Nota
Ciao, benvenuto nella Community SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Esplora a fondo Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a concorsi e promozioni speciali.
👉 Sei pronto a esplorare e creare con noi? Clicca [qui] e unisciti subito!
Guida Rapida su EzBlock
Nota
Se stai utilizzando un Raspberry Pi 5, il nostro software di programmazione grafica, EzBlock, non è supportato.
L’intervallo di angolazione del servo è -90~90°, ma l’angolo impostato in fabbrica è casuale, potrebbe essere 0°, 45° o altro. Se lo assembliamo con tale angolazione, ciò potrebbe causare uno stato caotico durante l’esecuzione del codice, o peggio, bloccare e bruciare il servo.
Per questo motivo, è necessario impostare tutti gli angoli dei servocomandi a 0° prima dell’installazione, in modo che l’angolo sia al centro, consentendo al servo di ruotare in entrambe le direzioni senza problemi.
Per prima cosa, Install EzBlock OS (i tutorial dedicati a EzBlock) su una scheda Micro SD. Una volta completata l’installazione, inseriscila nel Raspberry Pi.
Nota
Dopo aver completato l’installazione, torna a questa pagina.

Per assicurarti che il servo sia stato correttamente impostato su 0°, inserisci prima il braccio del servo sull’asse e ruota delicatamente il braccio per vedere l’angolazione raggiunta. Questo serve per verificare chiaramente la rotazione del servo.

Segui le istruzioni sul foglio di montaggio, collega il cavo della batteria e sposta l’interruttore di alimentazione su ON. Successivamente, collega un cavo USB-C alimentato per attivare la batteria. Attendi 1-2 minuti: un segnale acustico indicherà che il Raspberry Pi si è avviato con successo.

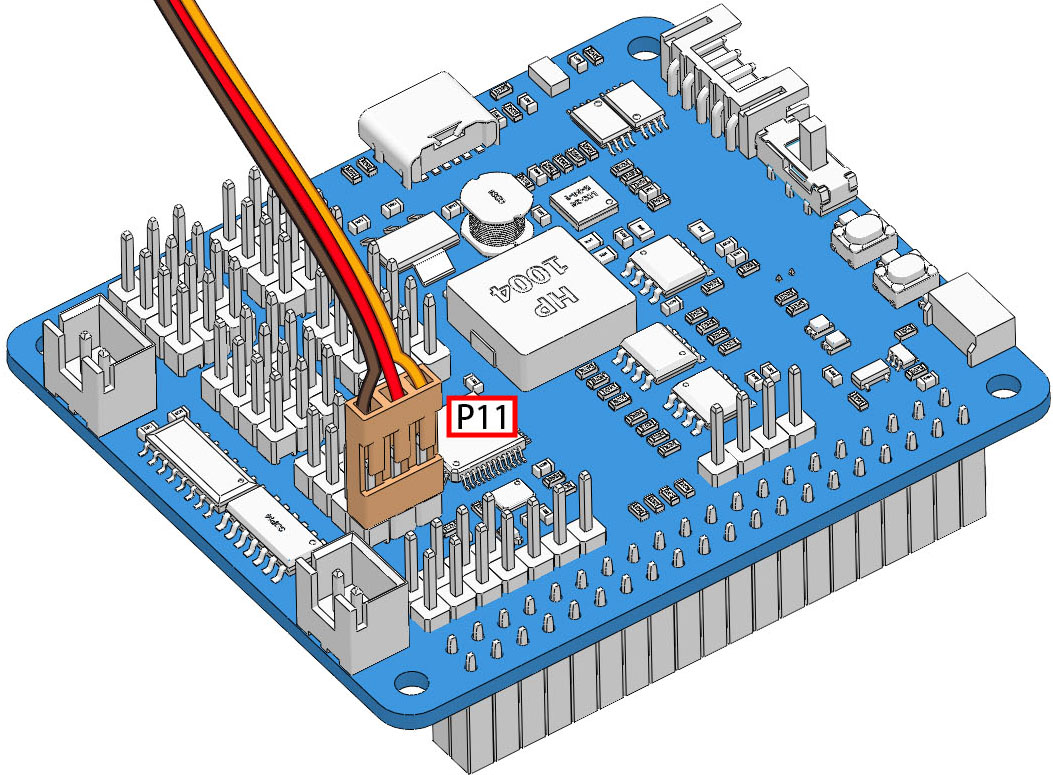
Collega il cavo del servo alla porta P11 come mostrato.
Tieni premuto il tasto USR, quindi premi il tasto RST per eseguire lo script di azzeramento del servo integrato nel sistema. Quando vedi il braccio del servo ruotare in una posizione (che corrisponde a 0°, un punto casuale che potrebbe non essere verticale o parallelo), significa che il programma è stato eseguito.
Nota
Questo passaggio deve essere eseguito solo una volta; successivamente, basta inserire gli altri cavi dei servocomandi e saranno automaticamente azzerati.

Ora rimuovi il braccio del servo, assicurandoti che il cavo del servo rimanga collegato, e non spegnere l’alimentazione. Procedi quindi al montaggio seguendo le istruzioni cartacee di assemblaggio.
Nota
Non scollegare il cavo del servo prima di fissare il servo con la vite; puoi scollegarlo solo dopo averlo fissato.
Non ruotare il servo mentre è alimentato per evitare danni; se l’asse del servo è inserito con un’angolazione errata, estrai il servo e reinseriscilo.
Prima di assemblare ciascun servo, collega il cavo del servo a P11 e accendi l’alimentazione per impostare l’angolo a 0°.
Questa funzione di azzeramento verrà disattivata se successivamente scarichi un programma sul robot tramite l’app EzBlock.