Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto per esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
Postura
PiCrawler può assumere una postura specifica scrivendo un array di coordinate. Qui assume una postura con la zampa posteriore destra sollevata.
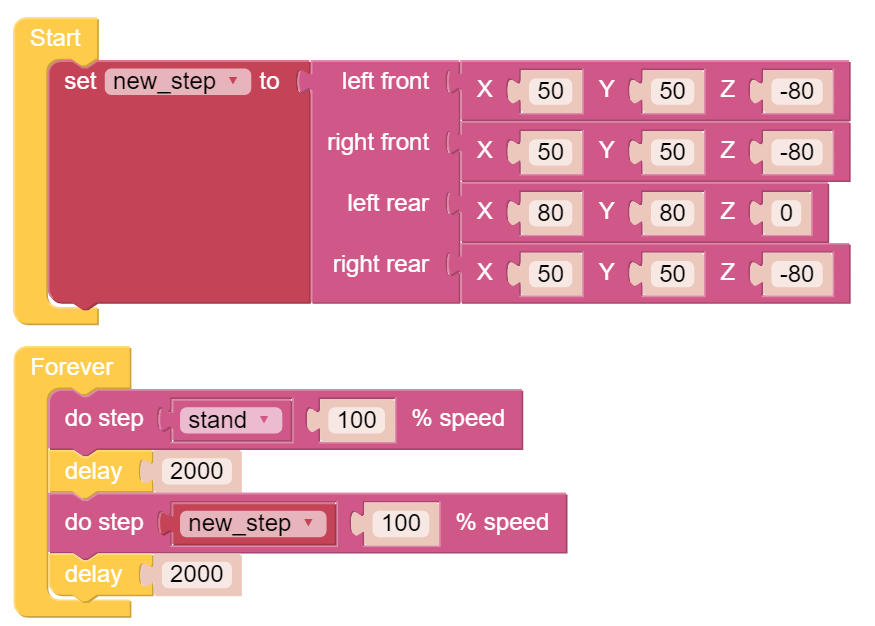
Programma
Nota
Puoi scrivere il programma seguendo l’immagine sottostante, facendo riferimento al tutorial: How to Create a New Project?.
Oppure trova il codice con lo stesso nome nella pagina Esempi di EzBlock Studio e clicca direttamente su Esegui o Modifica.
Come funziona?
Nel codice, la parte che devi osservare con attenzione è il comando do step.
Ha due usi principali:
Primo: Può utilizzare direttamente stand o sit.
Secondo: Può anche scrivere un array di 4 valori di coordinate.
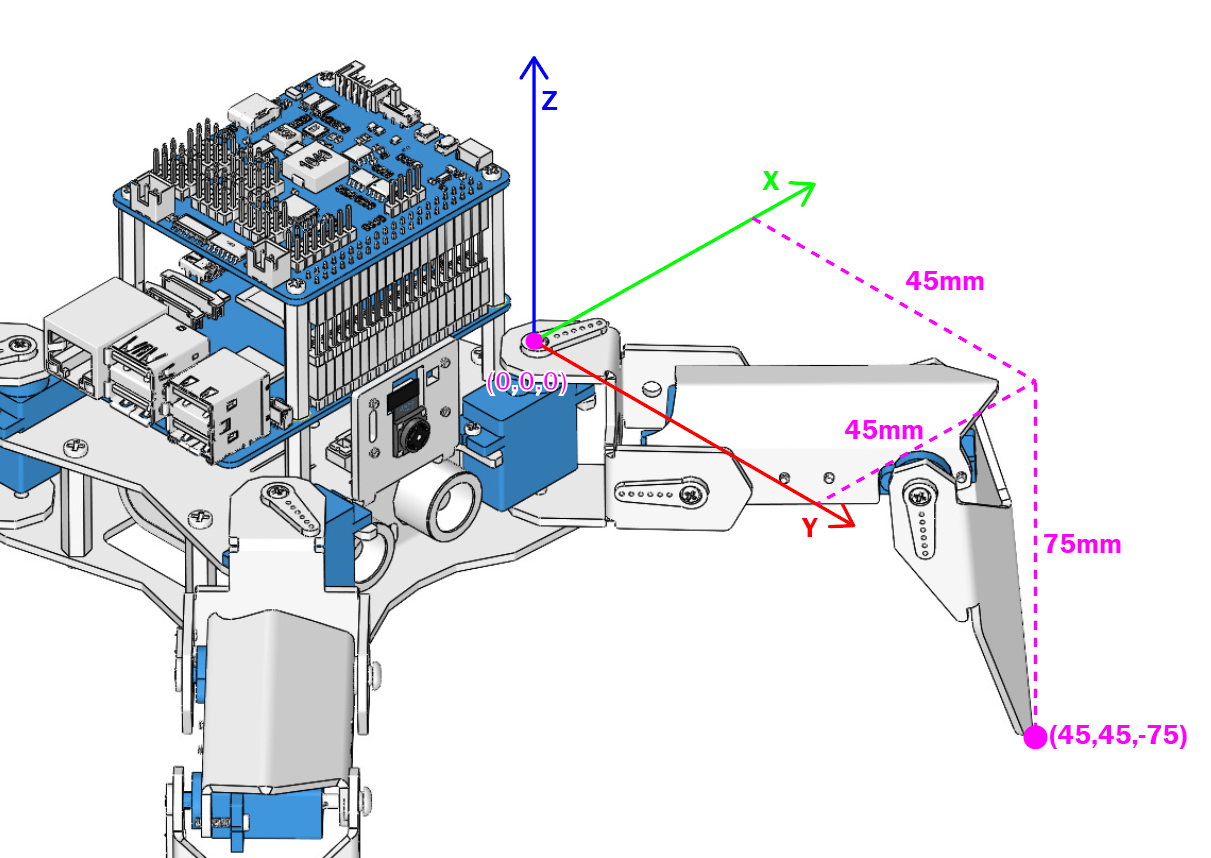
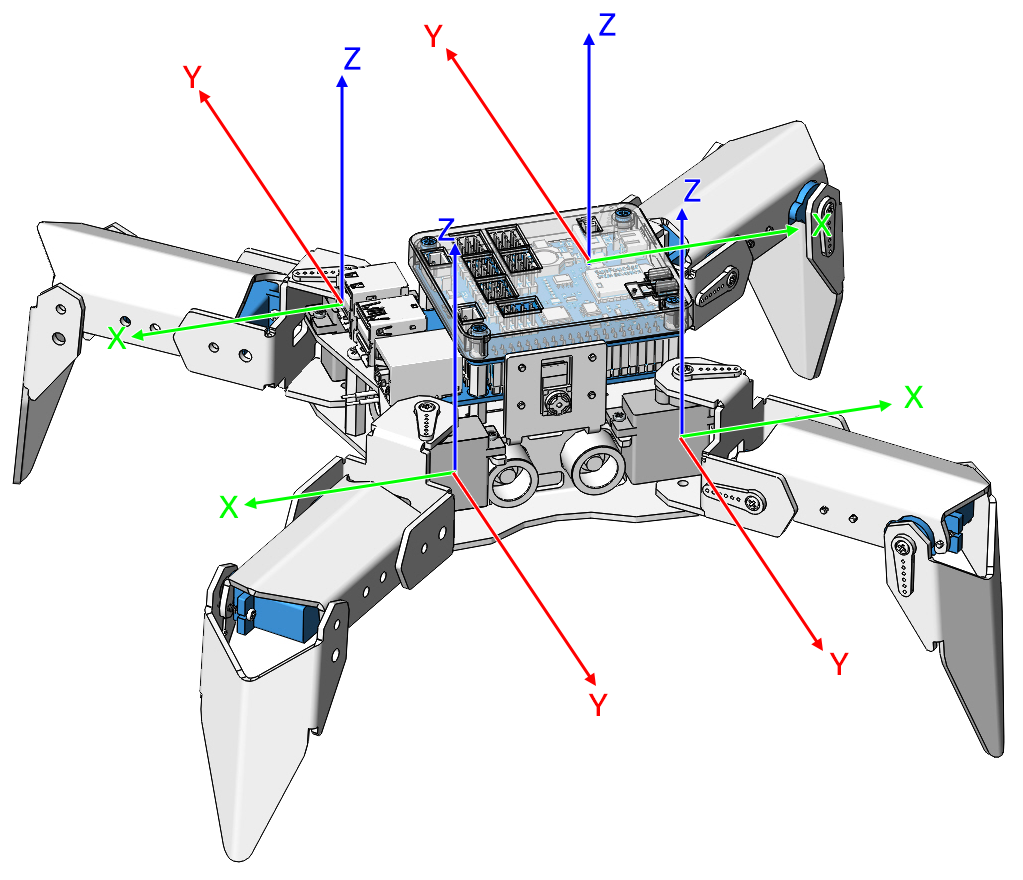
Ogni zampa ha un sistema di coordinate indipendente, come mostrato di seguito:
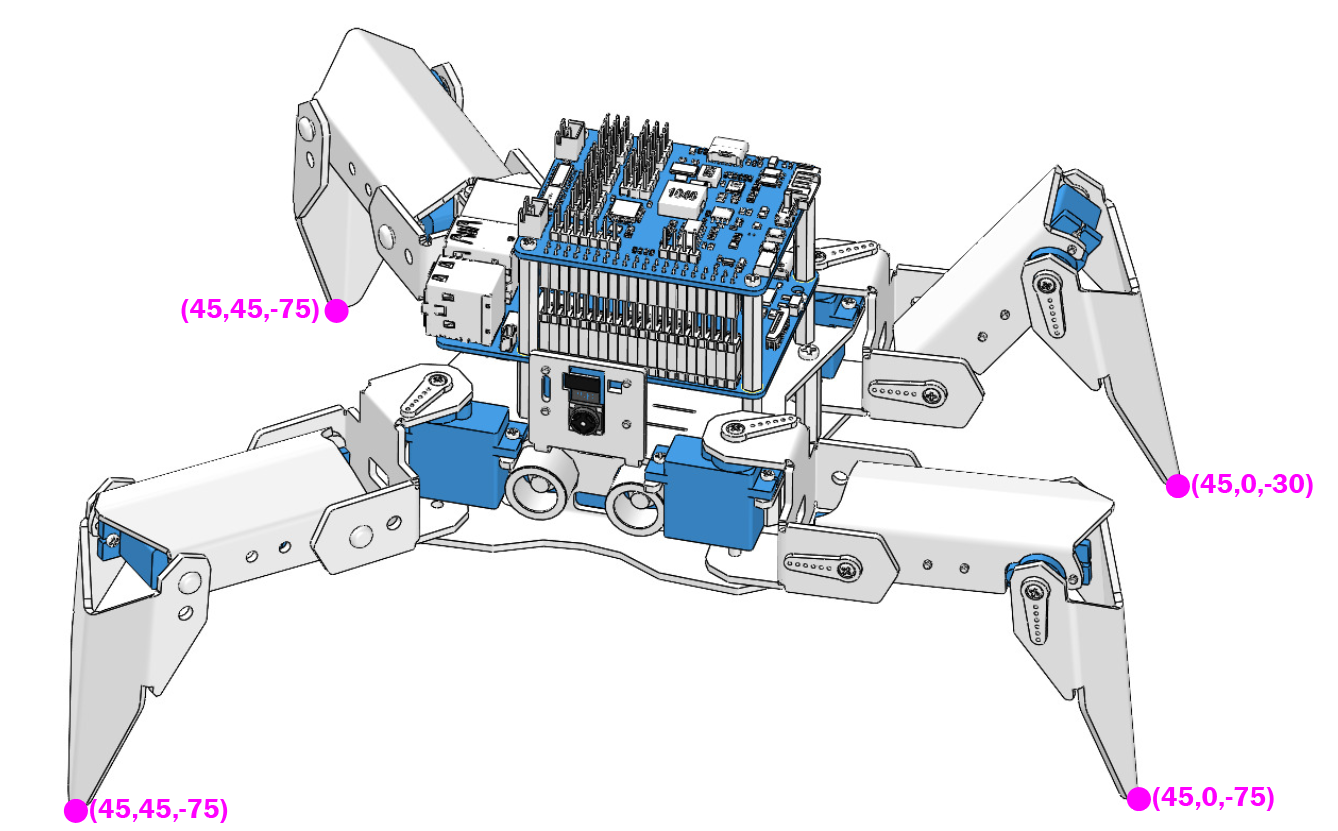
Devi misurare le coordinate di ciascun dito del piede individualmente. Come mostrato di seguito: