Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto per esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
Evitamento Ostacoli
In questo progetto, PiCrawler utilizzerà un modulo a ultrasuoni per rilevare ostacoli davanti a sé. Quando PiCrawler rileva un ostacolo, invierà un segnale e cercherà un’altra direzione per procedere.
Programma
Nota
Puoi scrivere il programma seguendo l’immagine sottostante, facendo riferimento al tutorial: How to Create a New Project?.
Oppure trova il codice con lo stesso nome nella pagina Esempi di EzBlock Studio e clicca direttamente su Esegui o Modifica.
Come funziona?
Puoi trovare i seguenti blocchi nella categoria Modulo per effettuare il rilevamento della distanza:

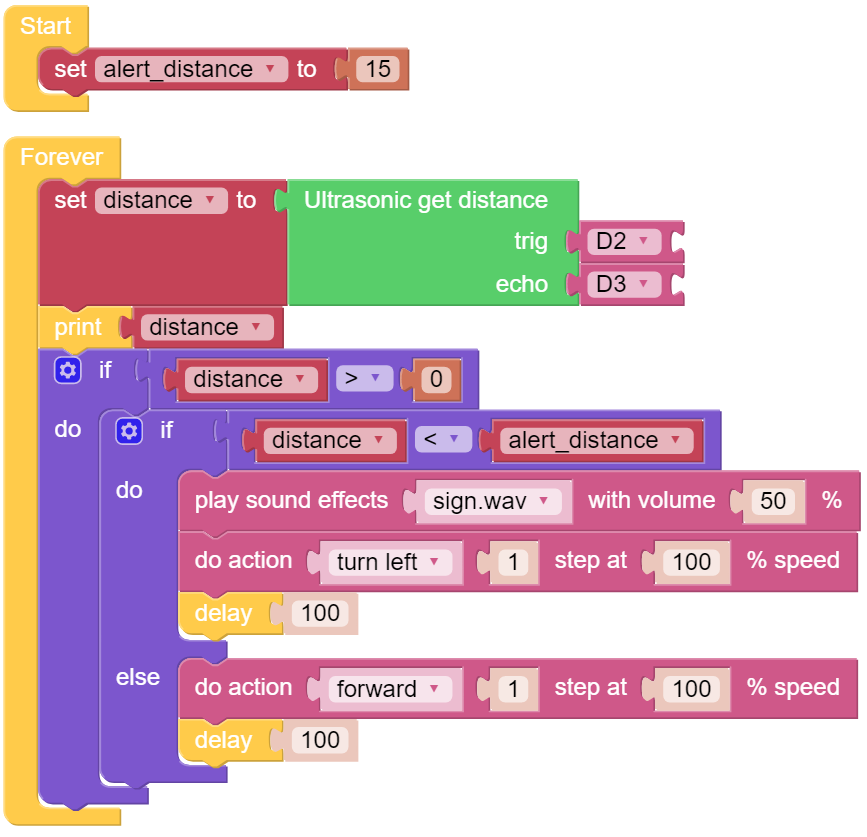
È importante notare che i due pin del blocco devono corrispondere al cablaggio effettivo, cioè trig-D2, echo-D3.
Ecco il programma principale.
Leggi la
distanzarilevata dal modulo a ultrasuoni e filtra i valori inferiori a 0 (quando il modulo a ultrasuoni è troppo lontano dall’ostacolo o non riesce a leggere correttamente i dati, appariràdistanza<0).Quando la
distanzaè inferiore aalert_distance(la soglia impostata precedentemente, che è 10), riproduci l’effetto sonorosign.wav. PiCrawler eseguirà unasvolta a sinistra.Quando la
distanzaè maggiore dialert_distance, PiCrawler procederàavanti.