Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto per esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
Calibrare il PiCrawler
Dopo aver collegato il PiCrawler, sarà necessario effettuare una calibrazione. Questo passaggio è fondamentale a causa di possibili deviazioni durante il processo di installazione o di limitazioni intrinseche dei servomotori, che possono causare una leggera inclinazione degli angoli dei servi. Durante questa fase, potrai calibrare questi angoli.
Tuttavia, se ritieni che l’assemblaggio sia perfetto e non sia necessaria alcuna calibrazione, puoi saltare questo passaggio.
Nota
Se desideri ricalibrare il robot durante l’utilizzo, segui i passaggi indicati di seguito.
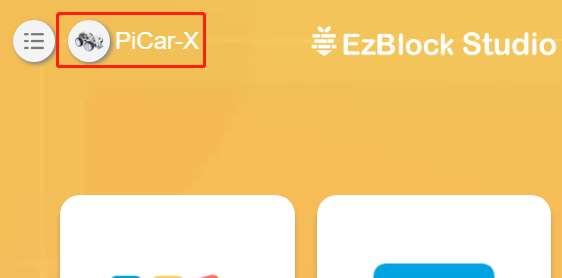
Puoi aprire la pagina dei dettagli del prodotto cliccando sull’icona di connessione nell’angolo in alto a sinistra.
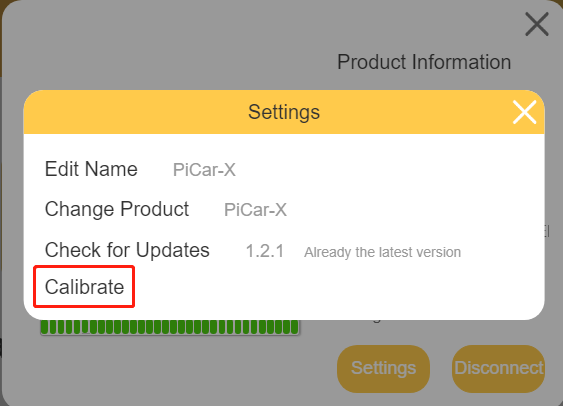
Clicca sul pulsante Impostazioni.

In questa pagina, puoi modificare il nome del prodotto, il tipo di prodotto, visualizzare la versione dell’app o calibrare il robot. Una volta cliccato su Calibra, verrai indirizzato alla pagina di calibrazione.
I passaggi per la calibrazione sono i seguenti:
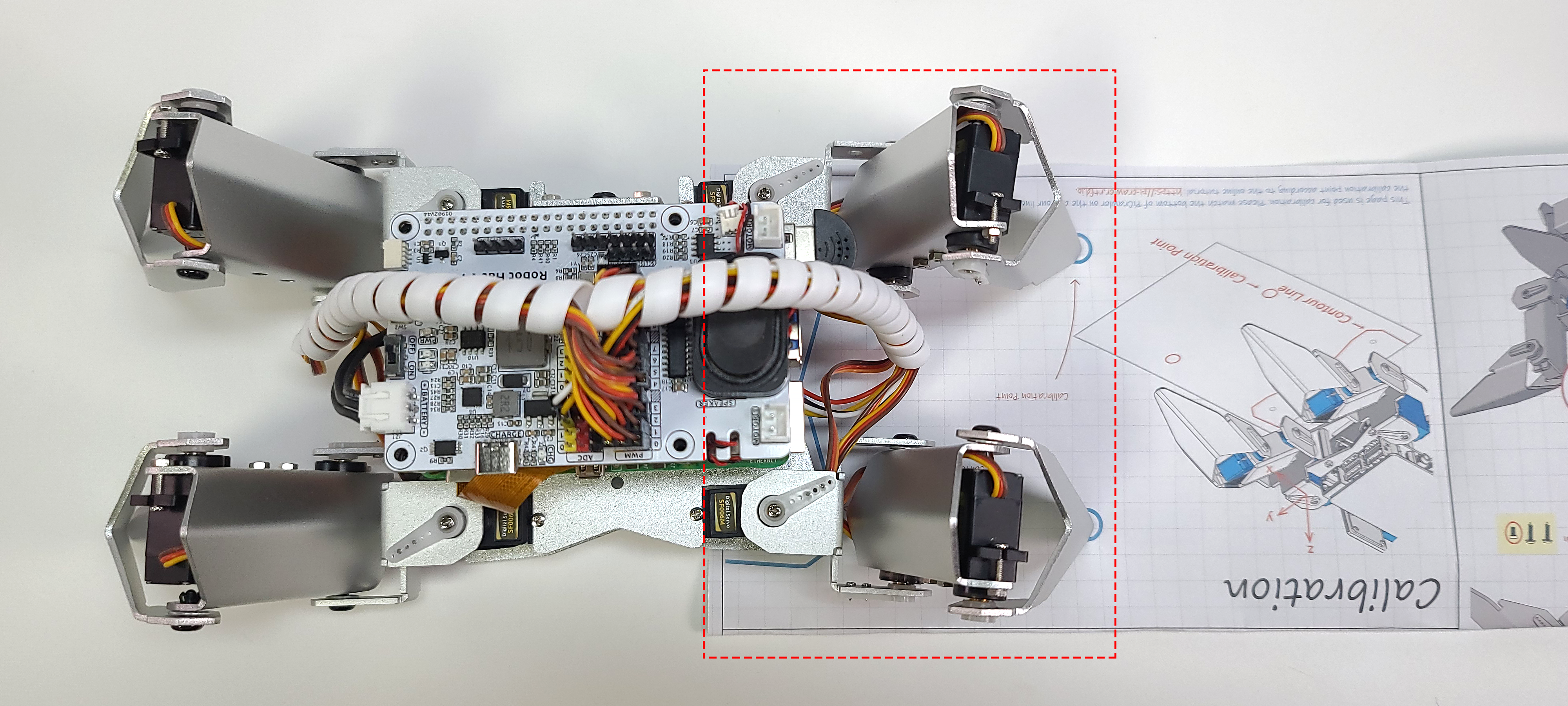
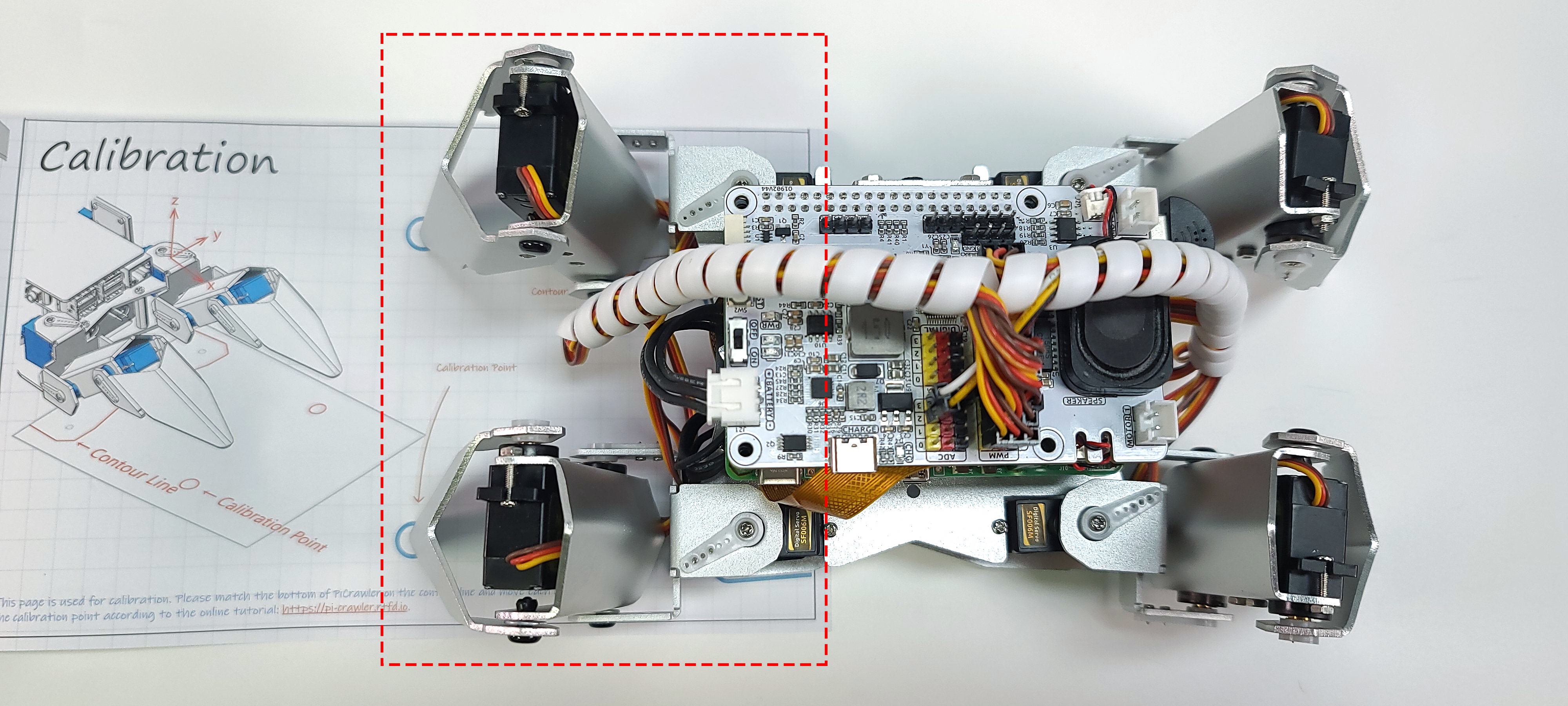
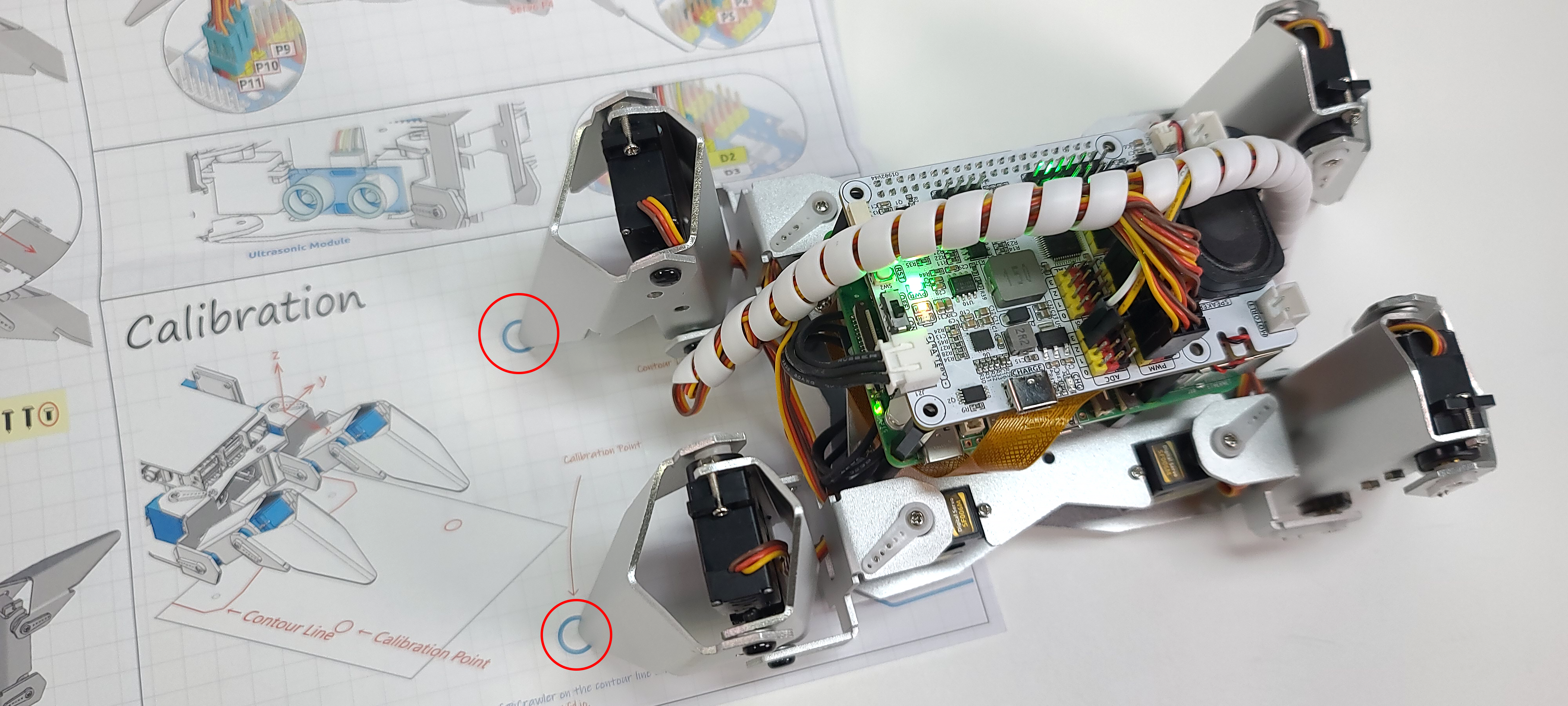
Prendi il foglio di montaggio, giralo all’ultima pagina e posizionalo piatto sul tavolo. Poi posiziona il PiCrawler come mostrato nell’immagine, allineando la sua base con il contorno sul grafico di calibrazione.
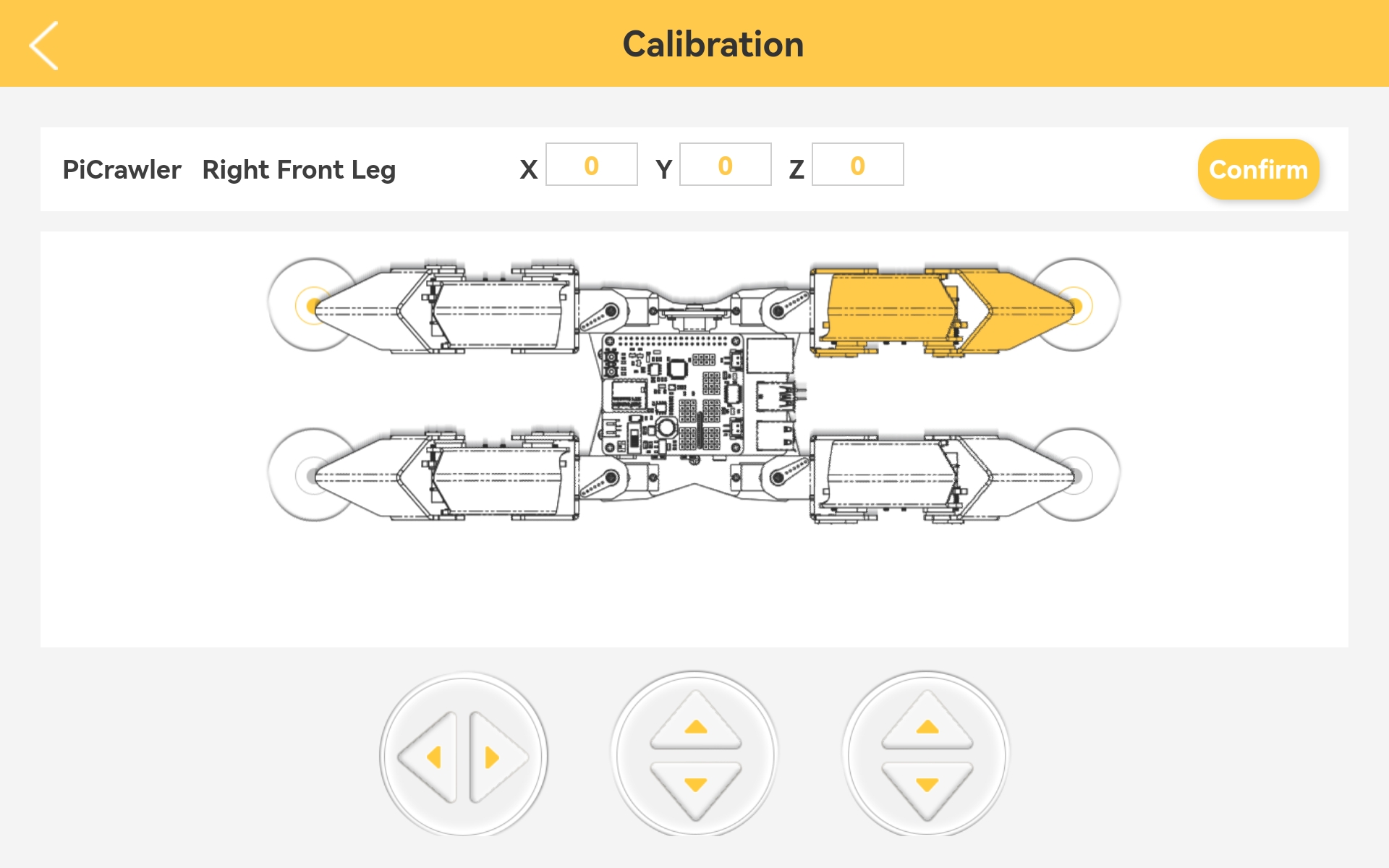
Torna a EzBlock Studio, seleziona un piede sul lato sinistro, quindi clicca sui 3 gruppi di pulsanti X, Y e Z, facendo in modo che le dita si allineino lentamente con il punto di calibrazione.
I pulsanti di calibrazione vengono utilizzati per le regolazioni fini; è necessario premere più volte questi pulsanti per vedere il cambiamento nella posizione del perno.
Si consiglia di cliccare prima sul pulsante «su» dell’asse Z per sollevare il piede, quindi regolare gli assi X e Y.
Allinea nello stesso modo l’altro piede sul lato sinistro.
Dopo aver calibrato i due piedi sinistri, sposta il foglio di calibrazione sul lato destro e calibra i due piedi destri seguendo lo stesso metodo descritto.