Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto per esplorare e creare con noi? Clicca su [qui] e unisciti oggi stesso!
Twist
Abbiamo già imparato come far assumere a PiCrawler una postura specifica; il passo successivo è combinare le posture per creare un’azione continua.
In questo esempio, le quattro zampe di PiCrawler si muovono su e giù a coppie, saltando a ritmo di musica.
Programma
Nota
Puoi scrivere il programma seguendo l’immagine sottostante, facendo riferimento al tutorial: How to Create a New Project?.
Oppure trova il codice con lo stesso nome nella pagina Esempi di EzBlock Studio e clicca direttamente su Esegui o Modifica.

Come funziona?
Utilizza due cicli for annidati per fare in modo che l’array new_step produca cambiamenti continui e regolari. Allo stesso tempo, il blocco do step esegue le posture per formare un’azione continua.
Puoi ottenere intuitivamente l’array di coordinate corrispondente a ciascuna postura da Regolazione della Postura.
Un elemento importante da tenere in considerazione è questo blocco della matrice delle coordinate:
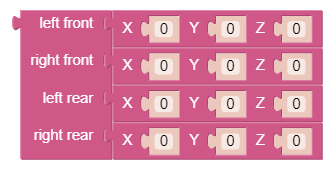
È essenzialmente un array bidimensionale che può essere elaborato tramite i blocchi della categoria Lista. La sua struttura è [[anteriore destro],[anteriore sinistro],[posteriore sinistro],[posteriore destro]].
In altre parole, in questo esempio, new_step#1 corrisponde all’anteriore destro; new_step#2 corrisponde all’anteriore sinistro; new_step#3 corrisponde al posteriore sinistro; e new_step#4 corrisponde al posteriore destro.