Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
SunFounder Raspberry Pi Robot - PiCrawler
Thank you for choosing our PiCrawler.
Note
This document is available in the following languages.
Please click on the respective links to access the document in your preferred language.
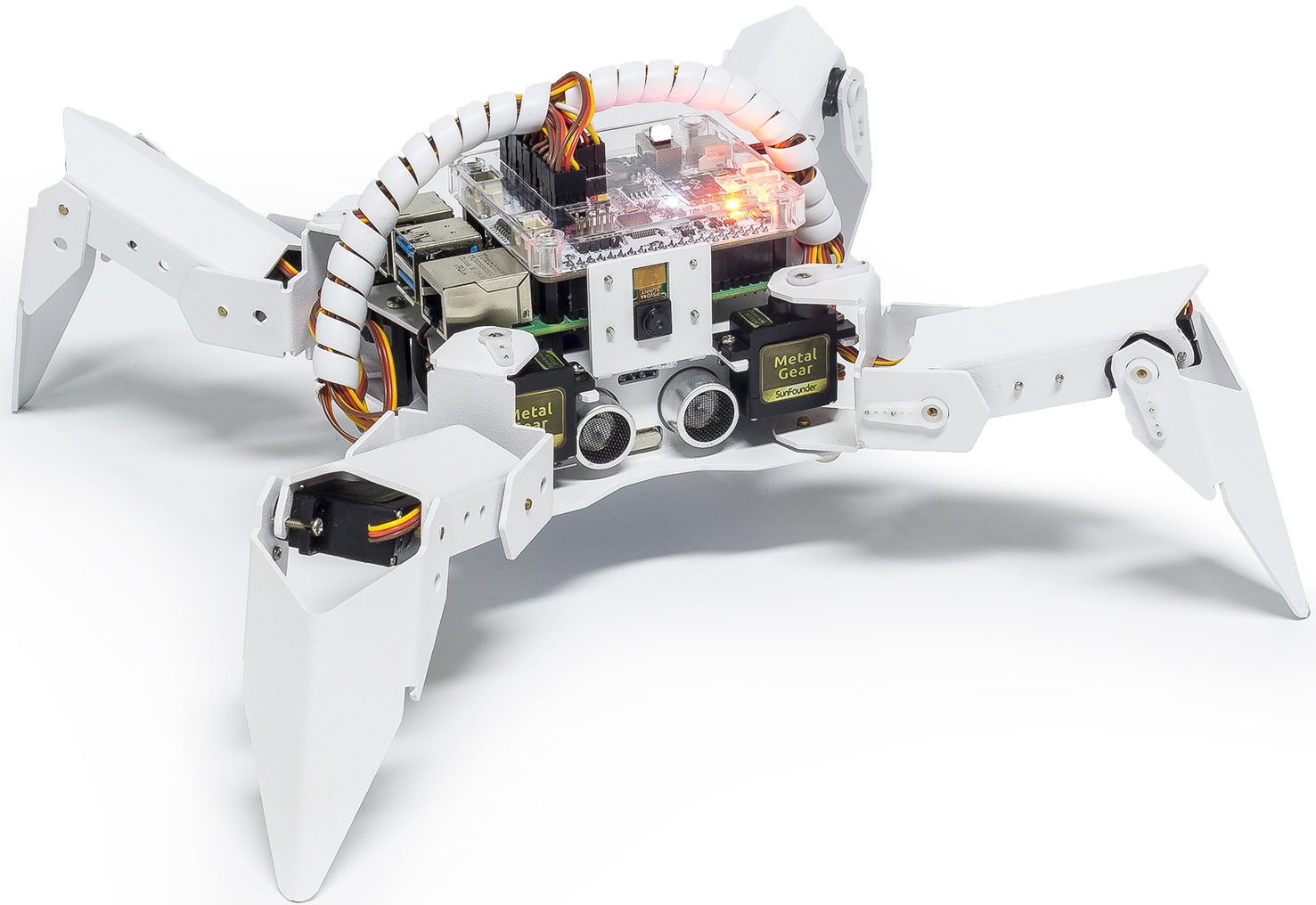
PiCrawler is a Raspberry Pi–based quadruped robot with an aluminum alloy structure. It features a camera module for color recognition and face detection, 12 metal-gear servos for walking and dynamic movements, an ultrasonic sensor for obstacle detection, and a Robot HAT with a built-in speaker for expressive sound effects.
This documentation includes the parts list, assembly guide, Robot HAT introduction, and PiCrawler programming tutorials.
Programming is divided into three chapters:
Play with Python: More experienced users can program PiCrawler directly using Python.
Play with Ezblock: Use Ezblock Studio for graphical programming.
See · Hear · Respond— AI-Powered with Multi-LLMs: Add speech and AI interaction with multiple LLM backends.
If you have any questions, please contact service@sunfounder.com.
Content
- About this Kit
- Assemble Videos
- Play with Python
- See · Hear · Respond— AI-Powered with Multi-LLMs
- Play with Ezblock
- Servo Zeroing for Assembly
- Appendix
- Hardware
- FAQ
- Q1: After installing Ezblock OS, the servo can’t turn to 0°?
- Q2: When using VNC, I am prompted that the desktop cannot be displayed at the moment?
- Q3: Why does the servo sometimes return to the middle position for no reason?
- Q4: About the Robot HAT Detailed Tutorial?
- Q5: About the Battery Charger?
- Q6: About the PiCamera installation?
Copyright Notice
All contents including but not limited to texts, images, and code in this manual are owned by the SunFounder Company. You should only use it for personal study,investigation, enjoyment, or other non-commercial or nonprofit purposes, under therelated regulations and copyrights laws, without infringing the legal rights of the author and relevant right holders. For any individual or organization that uses these for commercial profit without permission, the Company reserves the right to take legal action.