Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Twist
We already know how to make PiCrawler assume a specific pose, the next step is to combine the poses to form a continuous action.
Here, PiCrawler’s four feet are up and down in twos, jumping with the music.
Program
Note
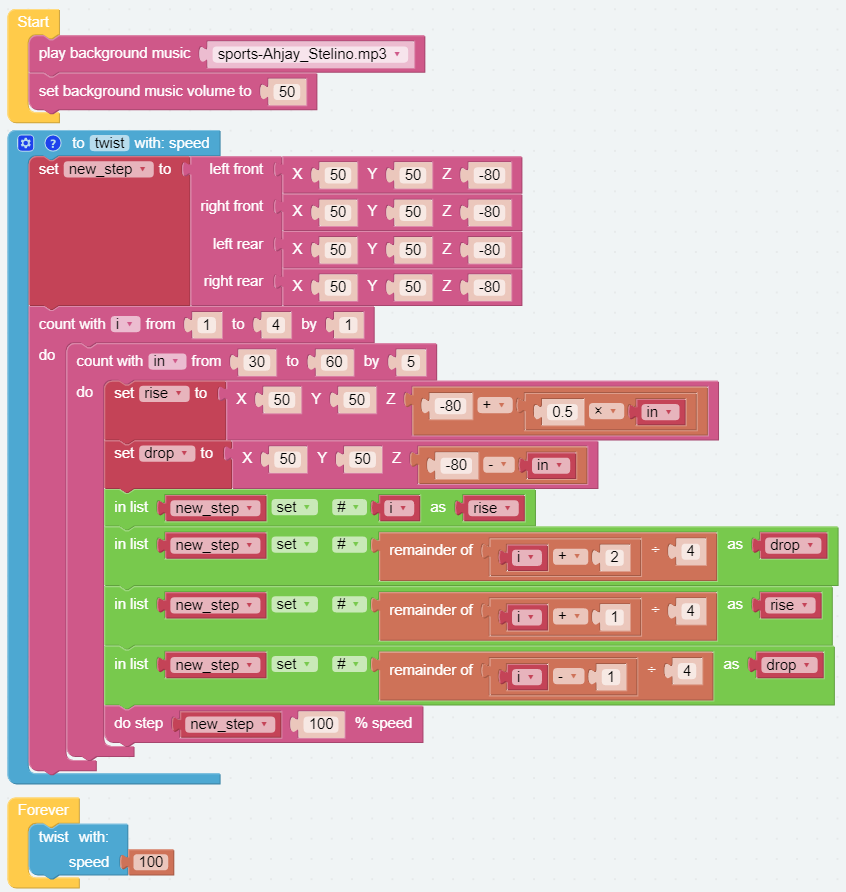
You can write the program according to the following picture, please refer to the tutorial: How to Create a New Project?.
Or find the code with the same name on the Examples page of the EzBlock Studio and click Run or Edit directly.
How it works?
It uses two layers of for loops to make the new_step array produce continuous and regular changes, and at the same time, do step executes the posture to form a continuous action.
You can intuitively get the coordinate value array corresponding to each pose from Adjust Posture.
One thing you need to pay attention to is this coordinate matrix block:
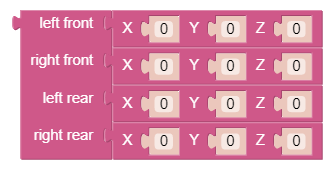
It is essentially a two-dimensional array, which can be processed by blocks in the List category. Its structure is [[right front],[left front],[left rear],[right rear]].
In other words, in this example, new_step#1 corresponds to the right front; new_step#2 corresponds to the left front; new_step#3 corresponds to the left rear; and new_step#4 corresponds to right rear.