Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el apasionante mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones Exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones en temporadas festivas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
2.6 ¡Inclínalo!

El interruptor de inclinación es un dispositivo de 2 pines con una bola de metal en el centro. Cuando el interruptor está en posición vertical, los dos pines están conectados; cuando se inclina, los dos pines se desconectan.
Componentes Necesarios
Para este proyecto, necesitaremos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1(10KΩ) |
||
6 |
1 |
Esquemático
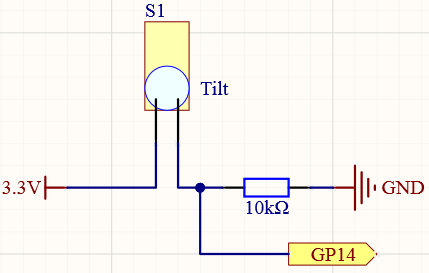
Cuando el interruptor de inclinación está en posición vertical, GP14 se establece en alto; al inclinarlo, GP14 se establece en bajo.
El resistor de 10KΩ tiene la función de mantener el GP14 en un estado bajo y estable cuando el interruptor de inclinación está inclinado.
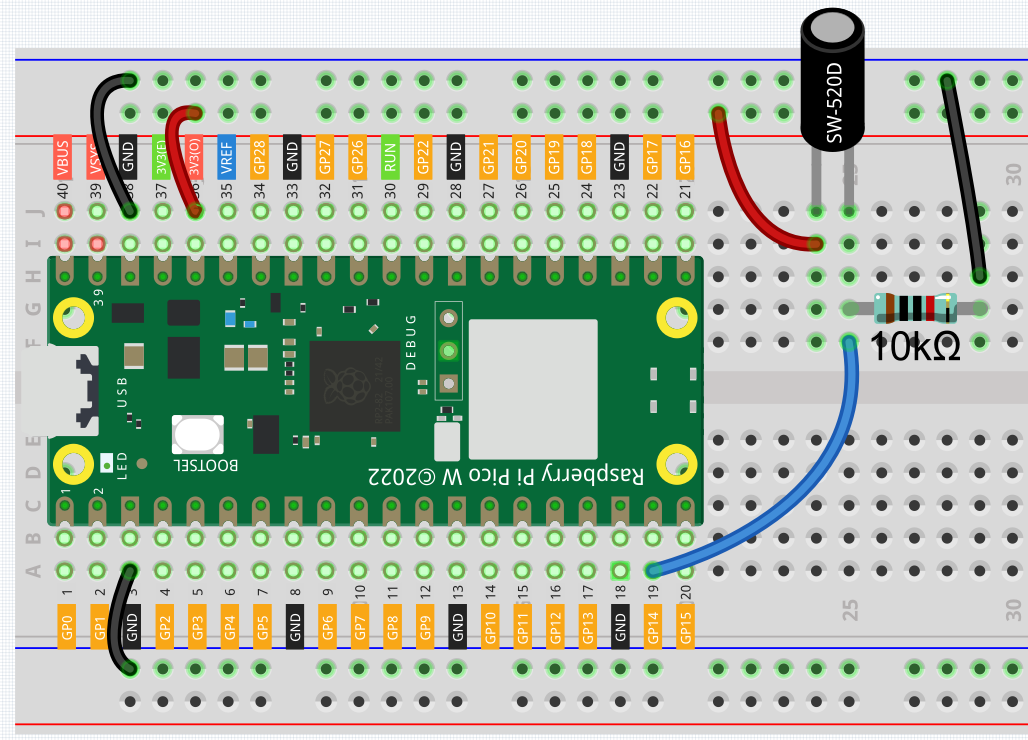
Conexiones
Código
Nota
Abre el archivo
2.6_tilt_switch.pyen la ruta dekepler-kit-main/micropythono copia este código en Thonny, luego haz clic en «Run Current Script» o simplemente presiona F5 para ejecutarlo.No olvides seleccionar el intérprete «MicroPython (Raspberry Pi Pico)» en la esquina inferior derecha.
Para tutoriales detallados, consulta Abrir y ejecutar código directamente.
import machine
import utime
button = machine.Pin(14, machine.Pin.IN)
while True:
if button.value() == 0:
print("The switch works!")
utime.sleep(1)
Después de ejecutar el programa, cuando inclines la breadboard (interruptor de inclinación), aparecerá en la consola «¡El interruptor funciona!».