注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1.6 モーションコントロール
はじめに
このレッスンでは、シンプルなモーションセンシングおよびコントロールデバイスを作成します。センサーとしてMPU6050を使用し、制御デバイスとしてステッパーモータを使用します。MPU6050を手袋に取り付けることで、手首を回転させることでステッパーモータを制御できます。
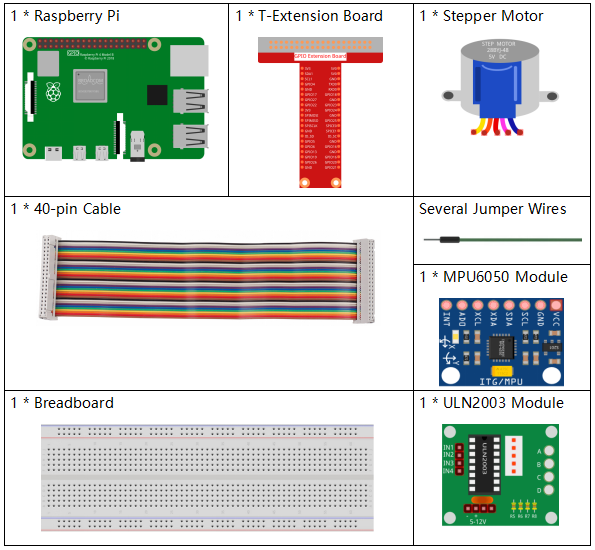
必要なコンポーネント
このプロジェクトには、以下のコンポーネントが必要です。
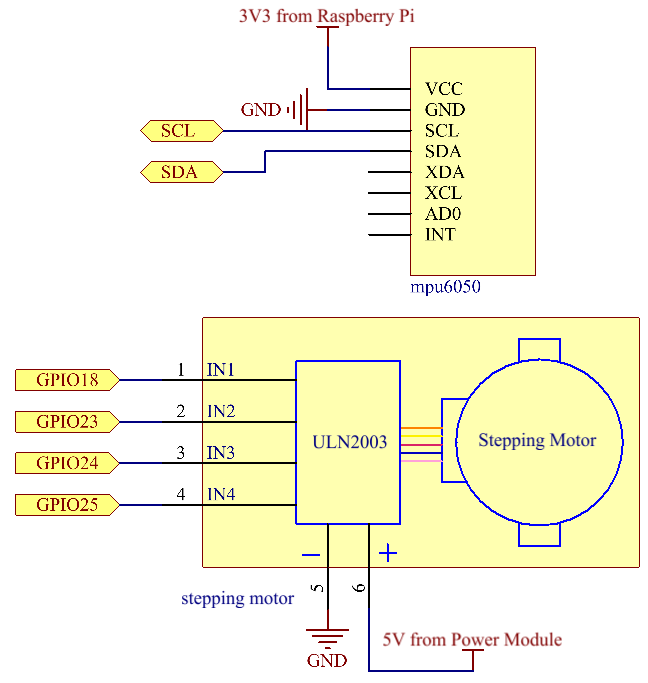
回路図
実験手順
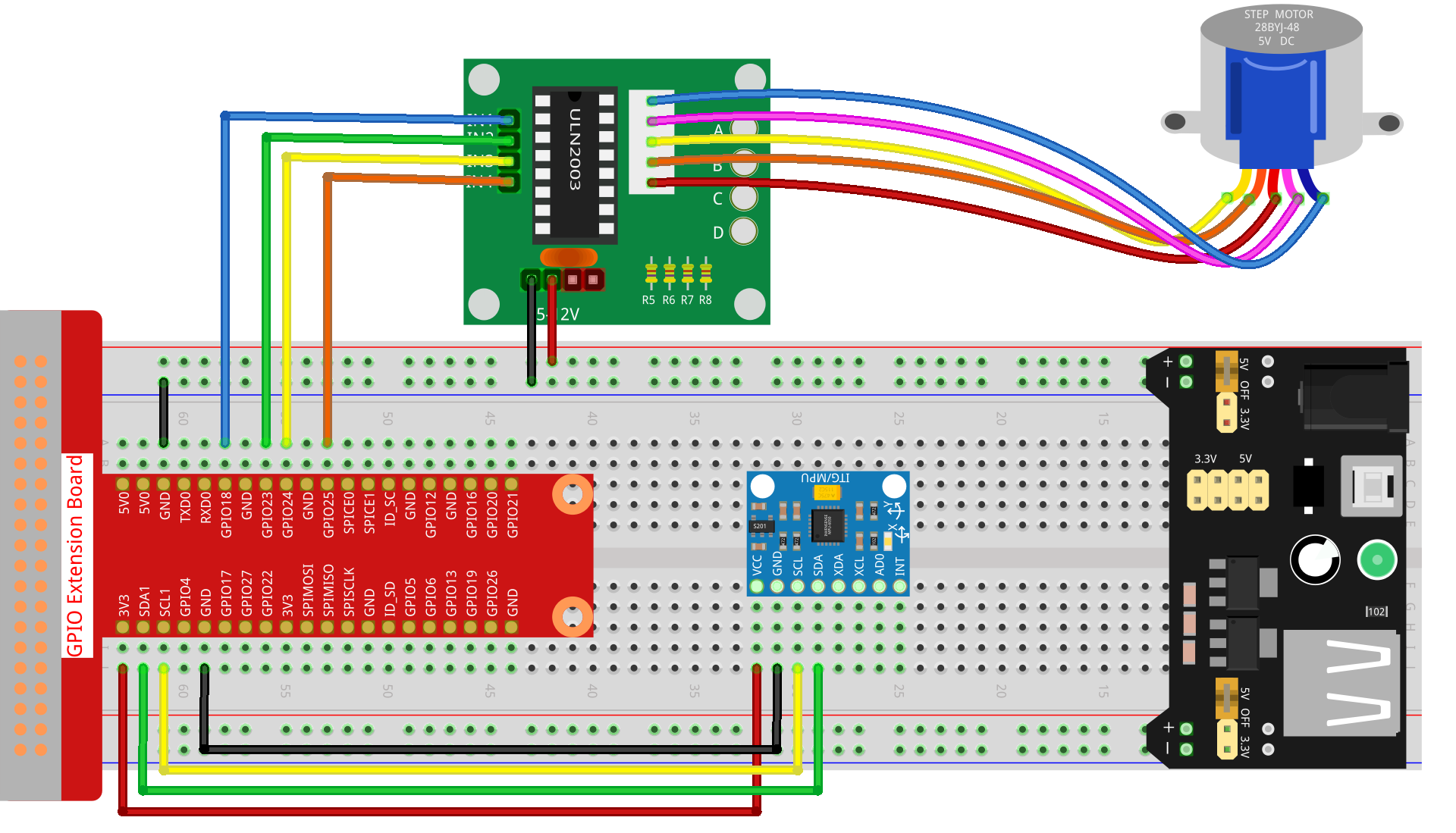
ステップ 1: 回路を組み立てます。
ステップ 2: コードファイルを開きます。
cd ~/davinci-kit-for-raspberry-pi/python-pi5
ステップ 3: 実行します。
sudo python3 3.1.6_MotionControl.py
コードが実行されると、 mpu6050 の Y軸 の傾斜角が 45 ℃ より大きい場合、ステッパーモータは反時計回りに回転し、 -45 ℃ より小さい場合、ステッパーモータは時計回りに回転します。
警告
エラー メッセージ RuntimeError: Cannot determine SOC peripheral base address が表示された場合は、 「gpiozero」が動作しない場合。 を参照してください。
コード
注釈
以下のコードは、 変更/リセット/コピー/実行/停止 ができます。ただし、それに先立ち、 davinci-kit-for-raspberry-pi/python-pi5 のようなソースコードのパスに移動する必要があります。コードを変更した後、効果を確認するために直接実行できます。
#!/usr/bin/env python3
from gpiozero import OutputDevice
import smbus
import math
import time
# MPU6050の電源管理レジスタを初期化
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
# MPU6050とのI2C通信の設定
bus = smbus.SMBus(1) # SMBusの初期化
address = 0x68 # MPU6050のI2Cアドレス
bus.write_byte_data(address, power_mgmt_1, 0) # MPU6050を起動
# ステッパーモータのピンをGPIOピン18, 23, 24, 25に初期化
motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
# モーターの回転速度パラメータを設定
rolePerMinute = 15
stepsPerRevolution = 2048
# 希望のRPMを達成するためのステップ間の遅延を計算
stepSpeed = (60 / rolePerMinute) / stepsPerRevolution
# 指定されたI2Cアドレスから1バイトを読み取る
def read_byte(adr):
return bus.read_byte_data(address, adr)
# 指定されたI2Cアドレスからワード(2バイト)を読み取る
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr + 1)
val = (high << 8) + low
return val
# 2の補数形式でワードを読み取る
def read_word_2c(adr):
val = read_word(adr)
if val >= 0x8000:
return -((65535 - val) + 1)
else:
return val
# 2点間のユークリッド距離を計算
def dist(a, b):
return math.sqrt((a * a) + (b * b))
# Y軸回転を計算
def get_y_rotation(x, y, z):
radians = math.atan2(x, dist(y, z))
return -math.degrees(radians)
# X軸回転を計算
def get_x_rotation(x, y, z):
radians = math.atan2(y, dist(x, z))
return math.degrees(radians)
# MPU6050からの傾斜角を取得
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle = get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
# ステッパーモータの回転を制御
def rotary(direction):
if direction == 'c':
# 時計回りの回転シーケンス
for j in range(4):
for i in range(4):
if 0x99 >> j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
time.sleep(stepSpeed)
elif direction == 'a':
# 反時計回りの回転シーケンス
for j in range(4):
for i in range(4):
if 0x99 << j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
time.sleep(stepSpeed)
# 傾斜角を連続的に読み取り、モーターを制御するためのメインループ
try:
while True:
angle = mpu6050()
if angle >= 45:
rotary('a') # 正の傾斜の場合、反時計回りに回転
elif angle <= -45:
rotary('c') # 負の傾斜の場合、時計回りに回転
except KeyboardInterrupt:
# キーボード割り込み時にすべてのモーターピンをオフにする
for pin in motorPin:
pin.off()
コードの説明
スクリプトは、必要なライブラリをインポートすることから始まります。GPIOピンを制御するための「gpiozero」、I2C通信用の「smbus」、数学的な操作に「math」、遅延を制御するための「time」をインポートします。
#!/usr/bin/env python3 from gpiozero import OutputDevice import smbus import math import time
MPU6050センサーとのI2C通信をセットアップします。「power_mgmt_1」と「power_mgmt_2」はセンサーの電源を管理するためのレジスタです。「power_mgmt_1」に書き込むことで、センサーは「起動」状態になります。
# MPU6050の電源管理レジスタを初期化 power_mgmt_1 = 0x6b power_mgmt_2 = 0x6c # MPU6050とのI2C通信のセットアップ bus = smbus.SMBus(1) # SMBusの初期化 address = 0x68 # MPU6050のI2Cアドレス bus.write_byte_data(address, power_mgmt_1, 0) # MPU6050を起動
Raspberry Pi上のGPIOピンを初期化して、ステッパーモータを制御します。各ピンはモーターのコイルに関連付けられています。
# ステッパーモータのピンをGPIOピン18, 23, 24, 25に初期化 motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
モーターの回転数(RPM)と1回転あたりのステップ数を設定します。「stepSpeed」は、希望のRPMを達成するためのステップ間の遅延を計算し、スムーズなモーターの動作を確保します。
# モーターの回転速度パラメータを設定 rolePerMinute = 15 stepsPerRevolution = 2048 # 希望のRPMを達成するためのステップ間の遅延を計算 stepSpeed = (60 / rolePerMinute) / stepsPerRevolution
これらの関数はI2C通信に使用されます。「read_byte」は指定されたアドレスから1バイトを読み取り、「read_word」は2バイト(ワード)を読み取り、ビット演算(
<<および+)を使用してそれらを単一の値に結合します。# 指定されたI2Cアドレスから1バイトを読み取る def read_byte(adr): return bus.read_byte_data(address, adr) # 指定されたI2Cアドレスからワード(2バイト)を読み取る def read_word(adr): high = bus.read_byte_data(address, adr) low = bus.read_byte_data(address, adr + 1) val = (high << 8) + low return val
この関数は、読み取ったワードを2の補数形式に変換し、センサーデータから符号付きの値を解釈するために使用されます。この変換は、負のセンサー値を処理するために必要です。
# 2の補数形式でワードを読み取る def read_word_2c(adr): val = read_word(adr) if val >= 0x8000: return -((65535 - val) + 1) else: return val
「dist」は2つのポイント間のユークリッド距離を計算し、回転計算に使用されます。「get_y_rotation」と「get_x_rotation」は「math」ライブラリの「atan2」関数を使用してY軸とX軸の回転角度を計算し、結果を度に変換します。
# 2点間のユークリッド距離を計算 def dist(a, b): return math.sqrt((a * a) + (b * b)) # Y軸回転を計算 def get_y_rotation(x, y, z): radians = math.atan2(x, dist(y, z)) return -math.degrees(radians) # X軸回転を計算 def get_x_rotation(x, y, z): radians = math.atan2(y, dist(x, z)) return math.degrees(radians)
この関数はMPU6050センサーから加速度計データを読み取り、読み取り値をスケーリングし、
get_y_rotation関数を使用して傾斜角を計算します。「read_word_2c」関数は2の補数形式でセンサーデータを読み取り、負の値を処理するために必要です。# MPU6050からの傾斜角を取得 def mpu6050(): accel_xout = read_word_2c(0x3b) accel_yout = read_word_2c(0x3d) accel_zout = read_word_2c(0x3f) accel_xout_scaled = accel_xout / 16384.0 accel_yout_scaled = accel_yout / 16384.0 accel_zout_scaled = accel_zout / 16384.0 angle = get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled) return angle
「rotary」関数はステッパーモーターの回転を制御します。指定された「direction」に基づいて時計回りまたは反時計回りの回転を実行し、特定のモーターピンをパターンに従ってオンまたはオフにします。
# ステッパーモーターの回転を制御 def rotary(direction): if direction == 'c': # 時計回りの回転シーケンス for j in range(4): for i in range(4): if 0x99 >> j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() time.sleep(stepSpeed) elif direction == 'a': # 反時計回りの回転シーケンス for j in range(4): for i in range(4): if 0x99 << j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() time.sleep(stepSpeed)
メインループはMPU6050センサーから傾斜角を連続して読み取り、角度に基づいてモーターの回転方向を制御します。プログラムが中断された場合(キーボード割り込みなど)、安全のためにすべてのモーターピンをオフにします。
# 傾斜角を連続的に読み取り、モーターを制御するためのメインループ try: while True: angle = mpu6050() if angle >= 45: rotary('a') # 正の傾斜の場合、反時計回りに回転 elif angle <= -45: rotary('c') # 負の傾斜の場合、時計回りに回転 except KeyboardInterrupt: # キーボード割り込み時にすべてのモーターピンをオフにする for pin in motorPin: pin.off()