注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1.2 ようこそ
はじめに
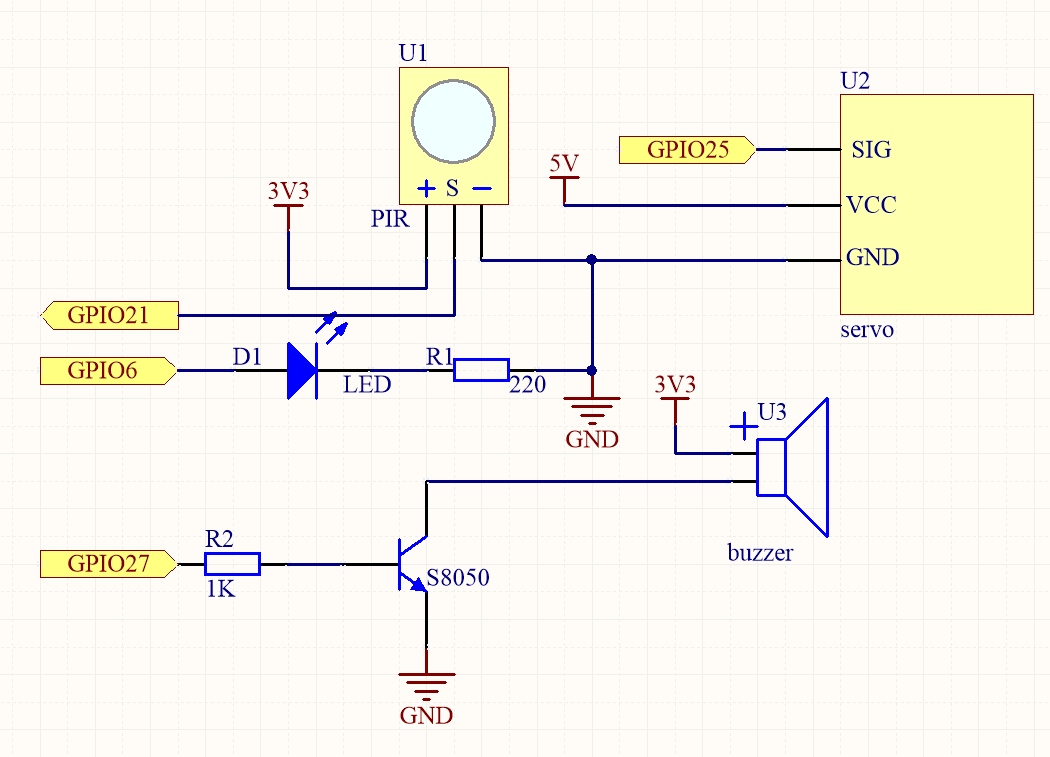
このプロジェクトでは、歩行者の動きを検出するためにPIRを使用し、 センサー付きコンビニエンスストアの扉の動作を模倣するためにサーボ、LED、ブザーを使用します。歩行者がPIRの感知範囲内に現れると、インジケーターライトが点灯し、扉が開き、ブザーが開店ベルを演奏します。
必要なコンポーネント
このプロジェクトでは、以下のコンポーネントが必要です。

回路図
実験手順
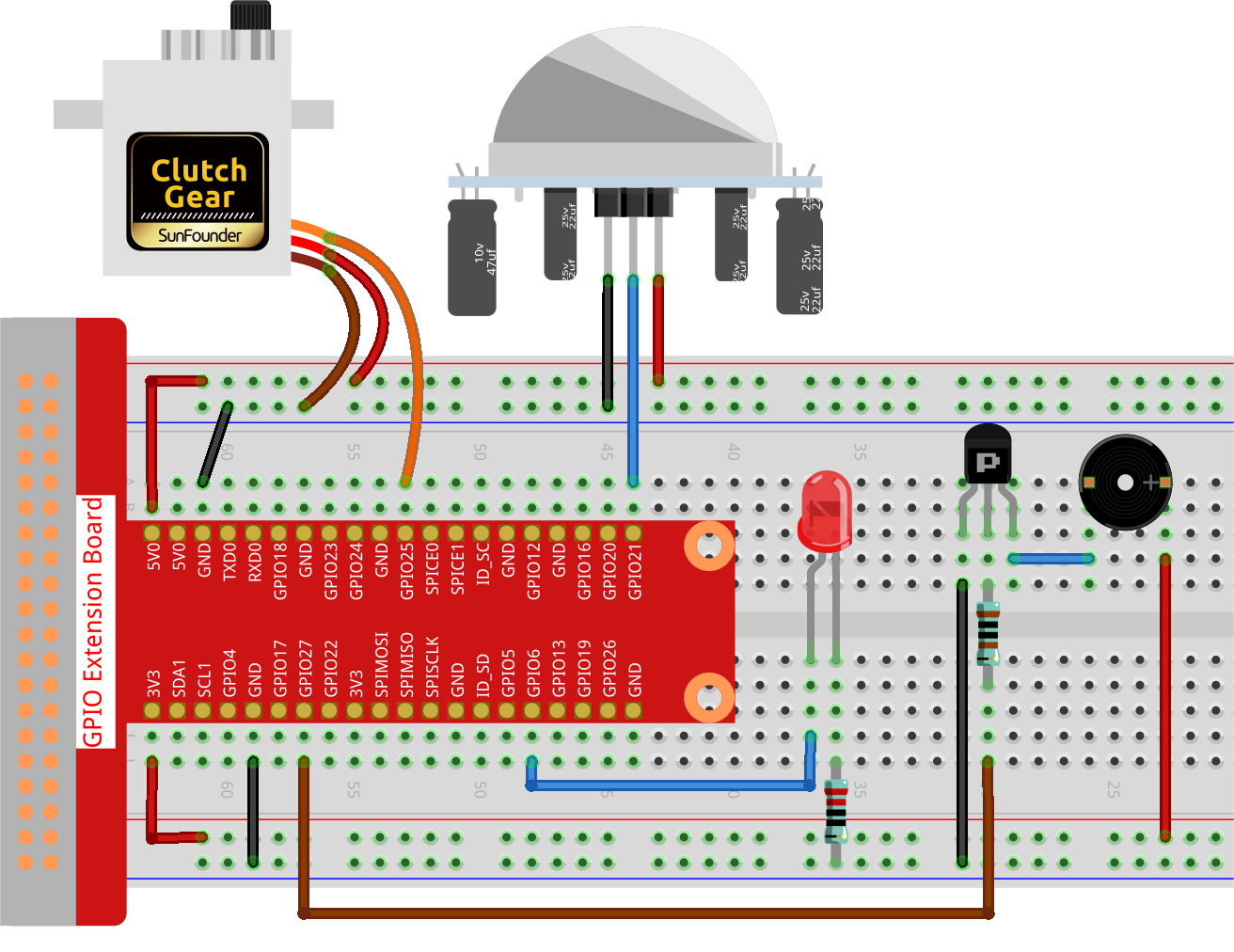
ステップ 1: 回路を組み立てます。
ステップ 2: ディレクトリを変更します。
cd ~/davinci-kit-for-raspberry-pi/python-pi5
ステップ 3: 実行します。
sudo python3 3.1.2_Welcome.py
コードが実行されると、PIRセンサーが通行人を検出した場合、扉は自動的に開き(サーボで模倣)、インジケーターライトが点灯し、開店ベルの音楽が再生されます。ドアベルの音楽が再生された後、システムは自動的に扉を閉じ、インジケーターライトを消灯し、次回の通行人を待機します。
PIRモジュールには2つのポテンショメータがあります。1つは感度を調整するためのもので、もう1つは検出距離を調整するためのものです。PIRモジュールをより良く動作させるには、これらのポテンショメータを両方とも反時計回りにまわす必要があります。

警告
エラー メッセージ RuntimeError: Cannot determine SOC peripheral base address が表示された場合は、 「gpiozero」が動作しない場合。 を参照してください。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 することができます。ただし、その前に davinci-kit-for-raspberry-pi/python-pi5 のソースコードパスに移動する必要があります。コードを変更した後、効果を確認するために直接実行できます。
#!/usr/bin/env python3
from gpiozero import LED, MotionSensor, Servo, TonalBuzzer
import time
# LED、モーションセンサー(PIR)、ブザーのためのGPIOピン設定
ledPin = LED(6)
pirPin = MotionSensor(21)
buzPin = TonalBuzzer(27)
# サーボモーターパルス幅補正ファクターと計算
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # 最大パルス幅
minPW = (1.0 - myCorrection) / 1000 # 最小パルス幅
# サーボをカスタムパルス幅で初期化
servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
# ブザーの音楽のチューン、音符と持続時間が含まれています
tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2),
('Eb4', 0.2), ('E4', 0.2), (None, 0.6),
('F#4', 0.2), ('G4', 0.2), (None, 0.6),
('Eb4', 0.2), ('E4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('C4', 0.2), ('B4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('B4', 0.2), ('Bb4', 0.5), (None, 0.6),
('A4', 0.2), ('G4', 0.2), ('E4', 0.2),
('D4', 0.2), ('E4', 0.2)]
def setAngle(angle):
"""
サーボを指定した角度に移動します。
:param angle: 角度(0-180)。
"""
value = float(angle / 180) # 角度をサーボの値に変換
servoPin.value = value # サーボの位置を設定
time.sleep(0.001) # サーボの動作のための短い遅延
def doorbell():
"""
ブザーを使用して音楽を演奏します。
"""
for note, duration in tune:
buzPin.play(note) # 音符を演奏
time.sleep(float(duration)) # 音符の持続時間
buzPin.stop() # チューン再生後にブザーを停止
def closedoor():
# LEDをオフにし、サーボを使ってドアを閉めます
ledPin.off()
for i in range(180, -1, -1):
setAngle(i) # サーボを180度から0度まで移動
time.sleep(0.001) # スムーズな動作のための短い遅延
time.sleep(1) # ドアを閉めた後の待機
def opendoor():
# LEDをオンにし、ドアを開ける(サーボを移動)、チューンを演奏し、ドアを閉じる
ledPin.on()
for i in range(0, 181):
setAngle(i) # サーボを0から180度まで移動
time.sleep(0.001) # スムーズな動作のための短い遅延
time.sleep(1) # チューンを演奏する前の待機
doorbell() # ドアベルのチューンを演奏
closedoor() # チューン演奏後にドアを閉じる
def loop():
# モーションを確認し、ドアを操作するためのメインループ
while True:
if pirPin.motion_detected:
opendoor() # モーションが検出された場合はドアを開く
time.sleep(0.1) # ループ内の短い遅延
try:
loop()
except KeyboardInterrupt:
# ユーザーの割り込み(たとえば、Ctrl+C)でGPIOをクリーンアップ
buzPin.stop()
ledPin.off()
代码解释
脚本は必要なモジュールをインポートすることから始まります。
gpiozeroライブラリは、LED、モーションセンサー、サーボモーター、音楽ブザーとのインターフェースを提供するために使用されます。timeモジュールはタイミング関連の機能を処理するために使用されます。#!/usr/bin/env python3 from gpiozero import LED, MotionSensor, Servo, TonalBuzzer import time
LED、PIRモーションセンサー、音楽ブザーをそれぞれのGPIOピンに初期化します。
# LED、モーションセンサー(PIR)、ブザーのためのGPIOピン設定 ledPin = LED(6) pirPin = MotionSensor(21) buzPin = TonalBuzzer(27)
サーボモーターの最大および最小パルス幅を計算し、微調整のための補正ファクターを組み込みます。
# サーボモーターパルス幅補正ファクターと計算 myCorrection = 0.45 maxPW = (2.0 + myCorrection) / 1000 # 最大パルス幅 minPW = (1.0 - myCorrection) / 1000 # 最小パルス幅
サーボモーターを正確な位置に配置するためにカスタムパルス幅を使用してGPIOピン25上で初期化します。
# サーボをカスタムパルス幅で初期化 servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
ブザーで演奏するための音楽チューンを、音符(周波数)と持続時間(秒)のシーケンスとして定義します。
# ブザーの音楽のチューン、音符と持続時間が含まれています tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2), ('Eb4', 0.2), ('E4', 0.2), (None, 0.6), ('F#4', 0.2), ('G4', 0.2), (None, 0.6), ('Eb4', 0.2), ('E4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('C4', 0.2), ('B4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('B4', 0.2), ('Bb4', 0.5), (None, 0.6), ('A4', 0.2), ('G4', 0.2), ('E4', 0.2), ('D4', 0.2), ('E4', 0.2)]
指定された角度にサーボを移動するための関数。角度をサーボの値に変換します。
def setAngle(angle): """ サーボを指定した角度に移動します。 :param angle: 角度(0-180)。 """ value = float(angle / 180) # 角度をサーボの値に変換 servoPin.value = value # サーボの位置を設定 time.sleep(0.001) # サーボの動作のための短い遅延
ブザーを使用して音楽を演奏するための関数。
tuneリスト内を繰り返し、各音符を指定された持続時間で演奏します。def doorbell(): """ ブザーを使用して音楽を演奏します。 """ for note, duration in tune: buzPin.play(note) # 音符を演奏 time.sleep(float(duration)) # 音符の持続時間 buzPin.stop() # チューン再生後にブザーを停止
サーボモーターを使用してドアを開閉するための関数。
opendoor関数はLEDを点灯させ、ドアを開け、音楽を演奏し、その後ドアを閉じます。def closedoor(): # LEDをオフにし、サーボを使ってドアを閉めます ledPin.off() for i in range(180, -1, -1): setAngle(i) # サーボを180度から0度まで移動 time.sleep(0.001) # スムーズな動作のための短い遅延 time.sleep(1) # ドアを閉めた後の待機 def opendoor(): # LEDをオンにし、ドアを開ける(サーボを移動)、チューンを演奏し、ドアを閉じる ledPin.on() for i in range(0, 181): setAngle(i) # サーボを0から180度まで移動 time.sleep(0.001) # スムーズな動作のための短い遅延 time.sleep(1) # チューンを演奏する前の待機 doorbell() # ドアベルのチューンを演奏 closedoor() # チューン演奏後にドアを閉じる
モーション検出を常にチェックするメインループ。モーションが検出された場合、
opendoor関数がトリガーされます。def loop(): # モーションを確認し、ドアを操作するためのメインループ while True: if pirPin.motion_detected: opendoor() # モーションが検出された場合はドアを開く time.sleep(0.1) # ループ内の短い遅延
メインループを実行し、スクリプトをキーボードコマンド(Ctrl+C)で停止できるようにし、クリーンな終了のためにブザーとLEDをオフにします。
try: loop() except KeyboardInterrupt: # ユーザーの割り込み(たとえば、Ctrl+C)でGPIOをクリーンアップ buzPin.stop() ledPin.off()