注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.2.4 PIR
前書き
このプロジェクトでは、人体の赤外線焦電センサーを使用してデバイスを作成する。誰かがLEDに近づくと、LEDは自動的に点灯する。そうでない場合、ライトは消灯する。この赤外線モーションセンサーは、人間や動物が発する赤外線を検出できるセンサーの一種である。
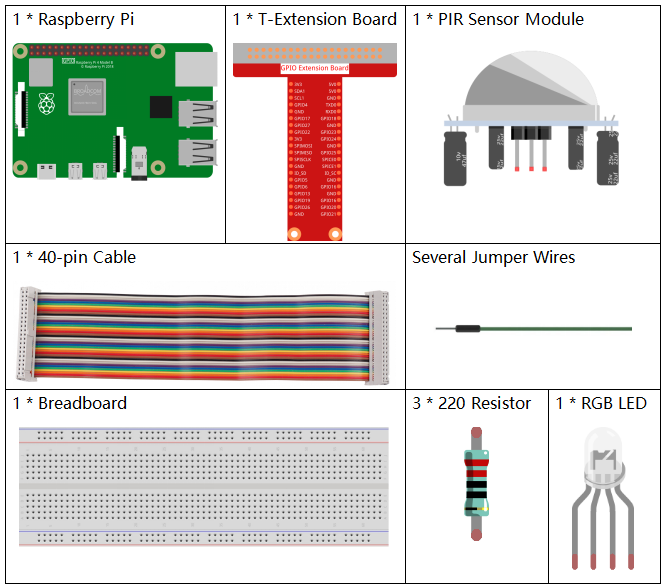
部品
原理
PIRセンサーは、赤外線熱放射を検出し、赤外線熱放射を放出する生物の存在を検出するために使用できる。
PIRセンサーは差動増幅器に接続される2つのスロットに分割される。 静止物体がセンサーの前にあるときはいつでも、二つのスロットは同じ量の放射線を受け取り、 出力はゼロである。動いている物体がセンサーの前にあるときはいつでも、 スロットの一つが他のスロットよりも多くの放射線を受け取り、出力を上下に変動させる。 この出力電圧の変化は、動きの検出の結果である。

検知モジュールの配線後、1分間の初期化が行われる。初期化中に、モジュールは間隔を置いて0〜3回出力する。その後、モジュールはスタンバイモードになる。干渉信号によって引き起こされる誤動作を避けるために、光源と他の源の干渉をモジュールの表面から遠ざけてください。 風はセンサーにも干渉する可能性があるため、風があまり無くてモジュールを使用することをお勧めする。
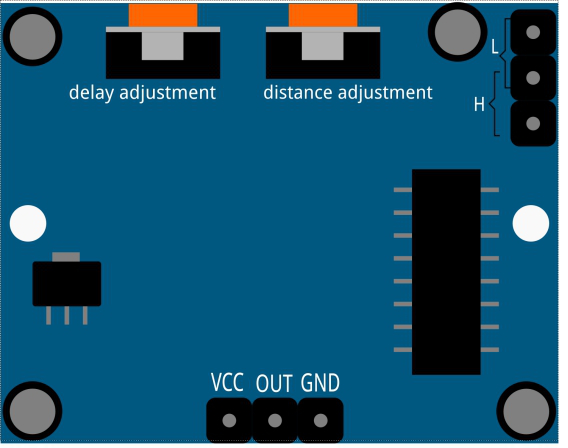
距離調整
距離調整ポテンショメータのノブを時計回りに回すと、検知距離の範囲が広がり、 最大検知距離範囲は約0〜7メートルである。 反時計回りに回すと、検知距離の範囲が狭くなり、最小検知距離の範囲は約0〜3メートルである。
遅延調整
遅延調整ポテンショメーターのノブを時計回りに回すと、検知遅延が増加することも分かる。 検知遅延の最大値は、最大300秒に達する可能性がある。 逆に、反時計回りに回転させると、最小5秒で遅延を短縮できる。
二つのトリガーモード:(ジャンパーキャップを使用して異なるモードを選択する)。
H: 繰り返し可能なトリガーモード、人体を感知した後、モジュールは高レベルを出力します。 その後の遅延期間中に、誰かが検知範囲に入ると、出力は高レベルのままになります。
L: 繰り返し不可のトリガーモード、人体を感知すると高レベルを出力します。 遅延後、出力は自動的に高レベルから低レベルに変わります。
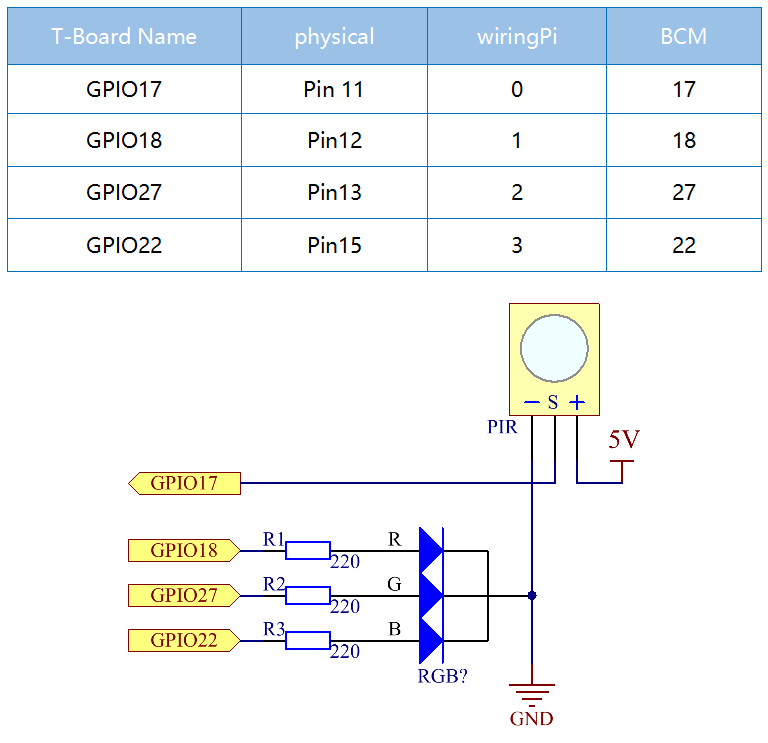
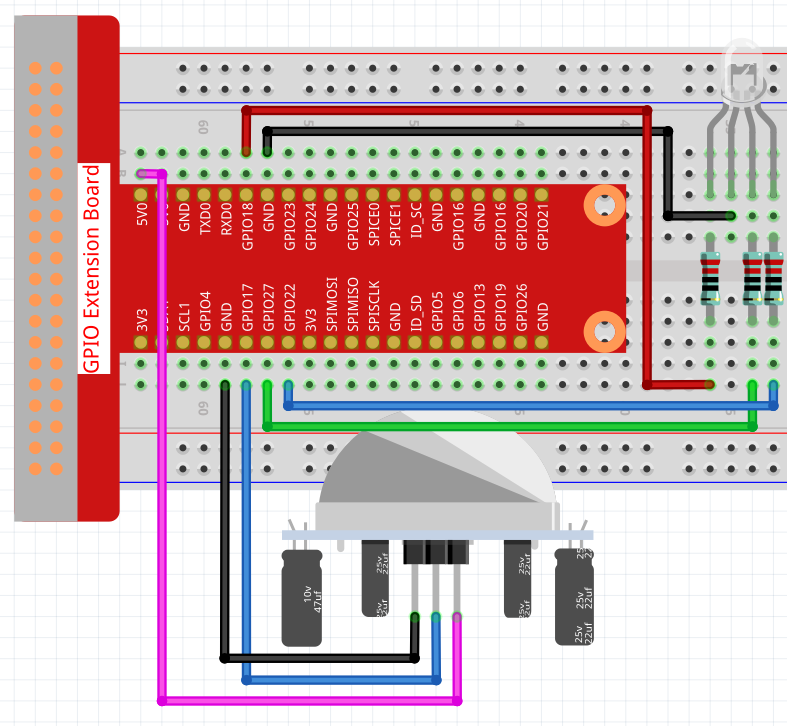
回路図
実験手順
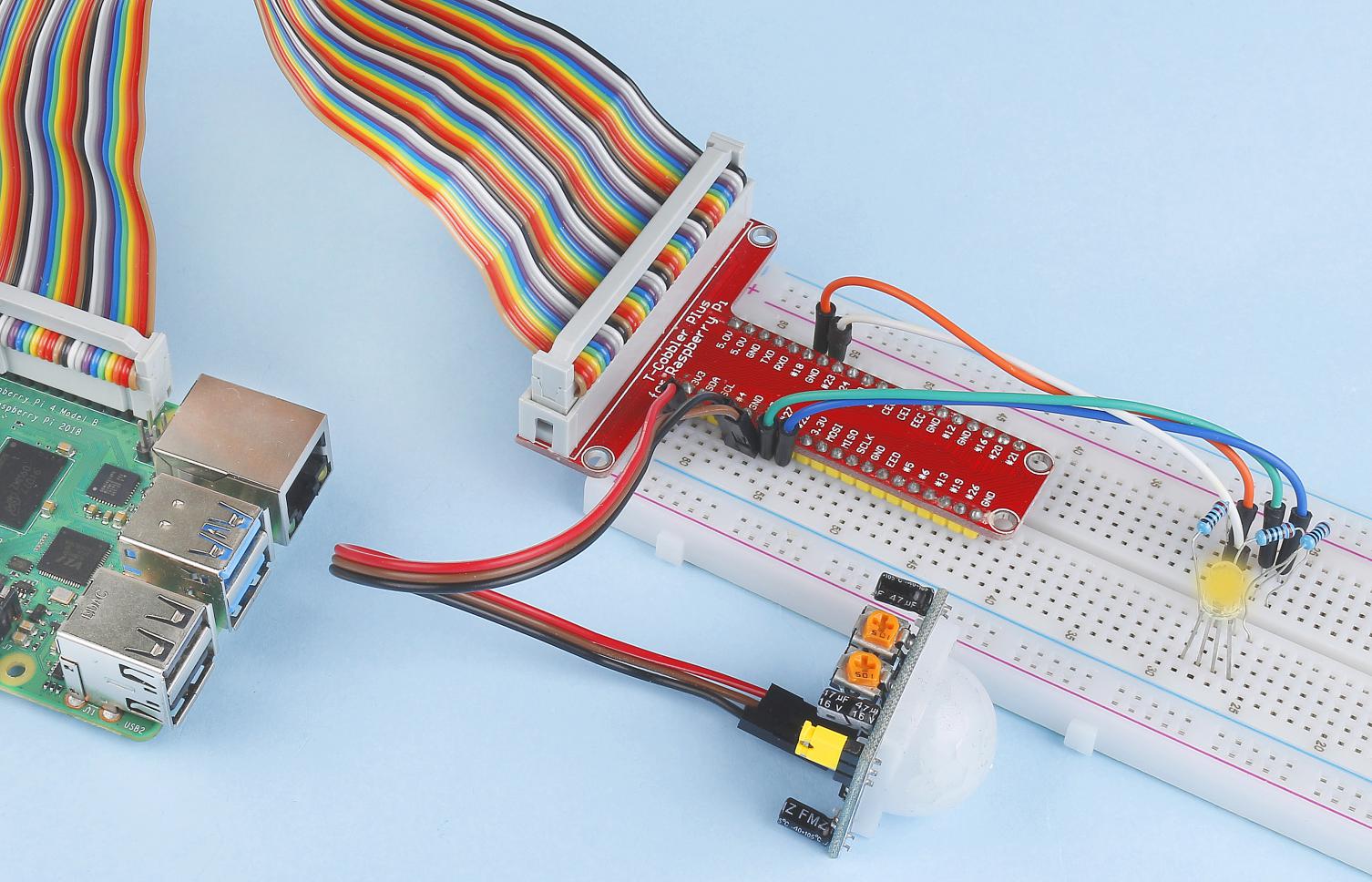
ステップ1: 回路を作る。
C言語ユーザー向け
ステップ2: コードのフォルダーに入る。
cd ~/davinci-kit-for-raspberry-pi/c/2.2.4/
ステップ3: コードをコンパイルする。
gcc 2.2.4_PIR.c -lwiringPi
ステップ4: EXEファイルを実行する。
sudo ./a.out
コードの実行後、PIR は周囲を検出し、誰かが通り過ぎるのを感知すると、 RGB LED を黄色に点灯させます。 PIR モジュールには 2 つのポテンショメータがあり、 1 つは感度を調整するためのもので、もう 1 つは検出距離を調整するためのものです。 PIR モジュールがうまく機能するためには、両方を完全に反時計回りに回す必要があります。

コード
#include <wiringPi.h>
#include <softPwm.h>
#include <stdio.h>
#define uchar unsigned char
#define pirPin 0 //the pir connect to GPIO0
#define redPin 1
#define greenPin 2
#define bluePin 3
void ledInit(void){
softPwmCreate(redPin, 0, 100);
softPwmCreate(greenPin,0, 100);
softPwmCreate(bluePin, 0, 100);
}
void ledColorSet(uchar r_val, uchar g_val, uchar b_val){
softPwmWrite(redPin, r_val);
softPwmWrite(greenPin, g_val);
softPwmWrite(bluePin, b_val);
}
int main(void)
{
int pir_val;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
ledInit();
pinMode(pirPin, INPUT);
while(1){
pir_val = digitalRead(pirPin);
if(pir_val== 1){ //if read pir is HIGH level
ledColorSet(0xff,0xff,0x00);
}
else {
ledColorSet(0x00,0x00,0xff);
}
}
return 0;
}
コードの 説明
void ledInit(void);
void ledColorSet(uchar r_val, uchar g_val, uchar b_val);
これらのコードは、RGB LEDの色を設定するために使用されます。詳細については、 1.1.2 RGB LED を参照してください。
int main(void)
{
int pir_val;
//……
pinMode(pirPin, INPUT);
while(1){
pir_val = digitalRead(pirPin);
if(pir_val== 1){ //if read pir is HIGH level
ledColorSet(0xff,0xff,0x00);
}
else {
ledColorSet(0x00,0x00,0xff);
}
}
return 0;
}
PIRが人間の赤外線スペクトルを検出すると、RGB LEDが黄色の光を発する。そうでない場合は、青色の光を発する。
Python言語ユーザー向け
ステップ2: コードのフォルダーに入る。
cd ~/davinci-kit-for-raspberry-pi/python/
ステップ3: EXEファイルを実行する。
sudo python3 2.2.4_PIR.py
コードの実行後、PIR は周囲を検出し、誰かが通り過ぎるのを感知すると、 RGB LED を黄色に点灯させます。 PIR モジュールには 2 つのポテンショメータがあり、 1 つは感度を調整するためのもので、もう 1 つは検出距離を調整するためのものです。 PIR モジュールがうまく機能するためには、両方を完全に反時計回りに回す必要があります。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 できます。 ただし、その前に、 davinci-kit-for-raspberry-pi/python のようなソースコードパスに移動する必要があります。
import RPi.GPIO as GPIO
import time
rgbPins = {'Red':18, 'Green':27, 'Blue':22}
pirPin = 17 # the pir connect to pin17
def setup():
global p_R, p_G, p_B
GPIO.setmode(GPIO.BCM) # Set the GPIO modes to BCM Numbering
GPIO.setup(pirPin, GPIO.IN) # Set pirPin to input
# Set all LedPin's mode to output and initial level to High(3.3v)
for i in rgbPins:
GPIO.setup(rgbPins[i], GPIO.OUT, initial=GPIO.HIGH)
# Set all led as pwm channel and frequece to 2KHz
p_R = GPIO.PWM(rgbPins['Red'], 2000)
p_G = GPIO.PWM(rgbPins['Green'], 2000)
p_B = GPIO.PWM(rgbPins['Blue'], 2000)
# Set all begin with value 0
p_R.start(0)
p_G.start(0)
p_B.start(0)
# Define a MAP function for mapping values. Like from 0~255 to 0~100
def MAP(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
# Define a function to set up colors
def setColor(color):
# configures the three LEDs' luminance with the inputted color value .
# Devide colors from 'color' veriable
R_val = (color & 0xFF0000) >> 16
G_val = (color & 0x00FF00) >> 8
B_val = (color & 0x0000FF) >> 0
# Map color value from 0~255 to 0~100
R_val = MAP(R_val, 0, 255, 0, 100)
G_val = MAP(G_val, 0, 255, 0, 100)
B_val = MAP(B_val, 0, 255, 0, 100)
#Assign the mapped duty cycle value to the corresponding PWM channel to change the luminance.
p_R.ChangeDutyCycle(R_val)
p_G.ChangeDutyCycle(G_val)
p_B.ChangeDutyCycle(B_val)
#print ("color_msg: R_val = %s, G_val = %s, B_val = %s"%(R_val, G_val, B_val))
def loop():
while True:
pir_val = GPIO.input(pirPin)
if pir_val==GPIO.HIGH:
setColor(0xFFFF00)
else :
setColor(0x0000FF)
def destroy():
p_R.stop()
p_G.stop()
p_B.stop()
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()
コードの 説明
rgbPins = {'Red':18, 'Green':27, 'Blue':22}
def setup():
global p_R, p_G, p_B
GPIO.setmode(GPIO.BCM)
# ……
for i in rgbPins:
GPIO.setup(rgbPins[i], GPIO.OUT, initial=GPIO.HIGH)
p_R = GPIO.PWM(rgbPins['Red'], 2000)
p_G = GPIO.PWM(rgbPins['Green'], 2000)
p_B = GPIO.PWM(rgbPins['Blue'], 2000)
p_R.start(0)
p_G.start(0)
p_B.start(0)
def MAP(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
def setColor(color):
...
これらのコードは、RGB LEDの色を設定するために使用されます。詳細については、 1.1.2 RGB LED を参照してください。
def loop():
while True:
pir_val = GPIO.input(pirPin)
if pir_val==GPIO.HIGH:
setColor(0xFFFF00)
else :
setColor(0x0000FF)
PIRが人間の赤外線スペクトルを検出すると、RGB LEDが黄色の光を発する。そうでない場合は、青色の光を発する。
現象画像