注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.1.3 チルトスイッチ
前書き
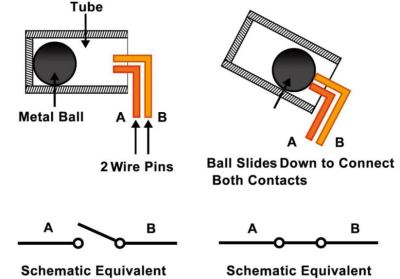
これは、内部に金属製のボールがあるボールチルトスイッチである。小さな角度の傾きを検出するために使用される。
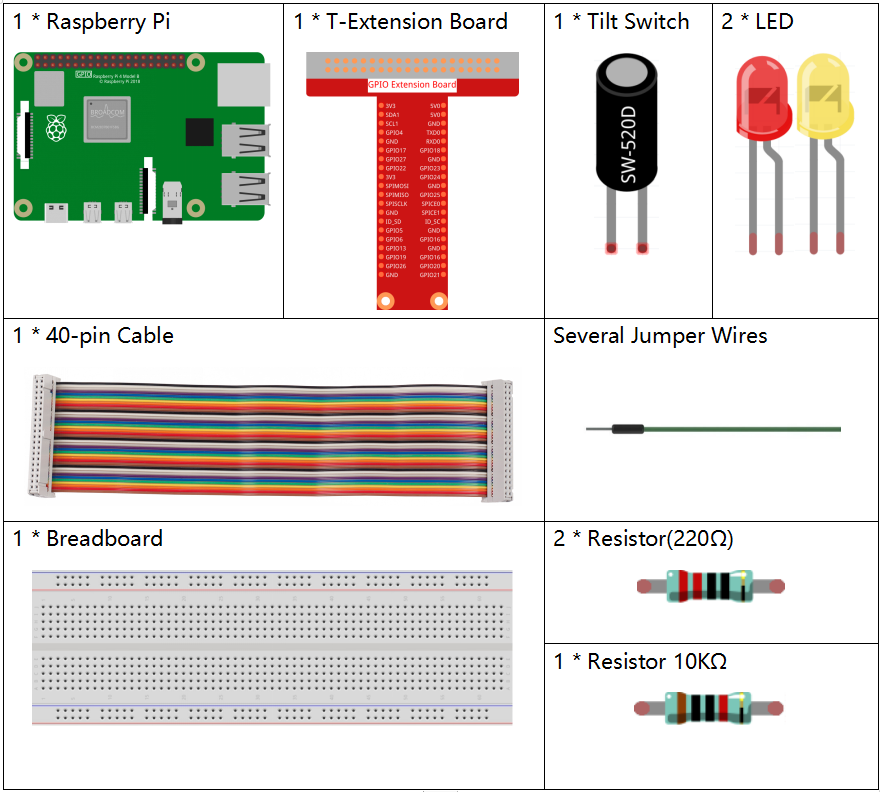
部品
原理
チルト
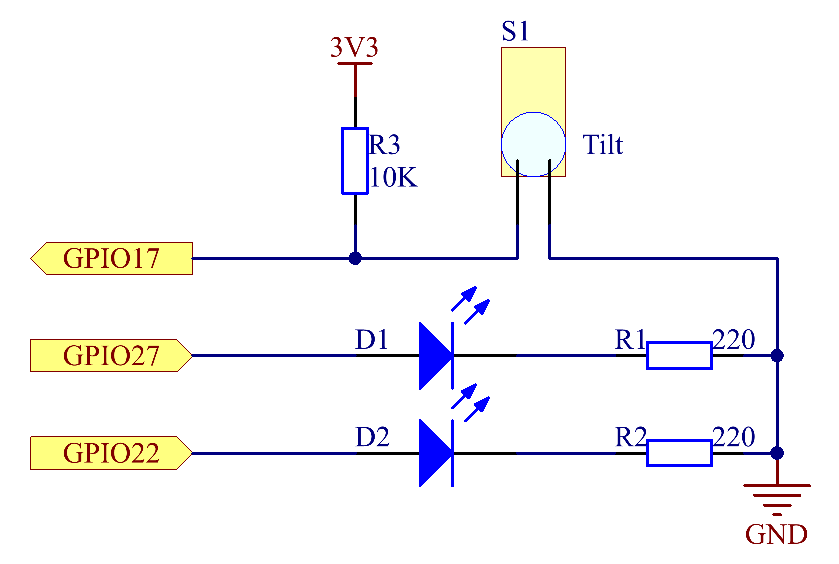
原理は非常に簡単である。スイッチが特定の角度に傾けられると、内側のボールが転がり落ち、外側のピンに接続された2つの接点に触れて、回路をトリガーする。 そうしないと、ボールが接点から遠ざかり、回路が遮断される。
回路図
実験手順
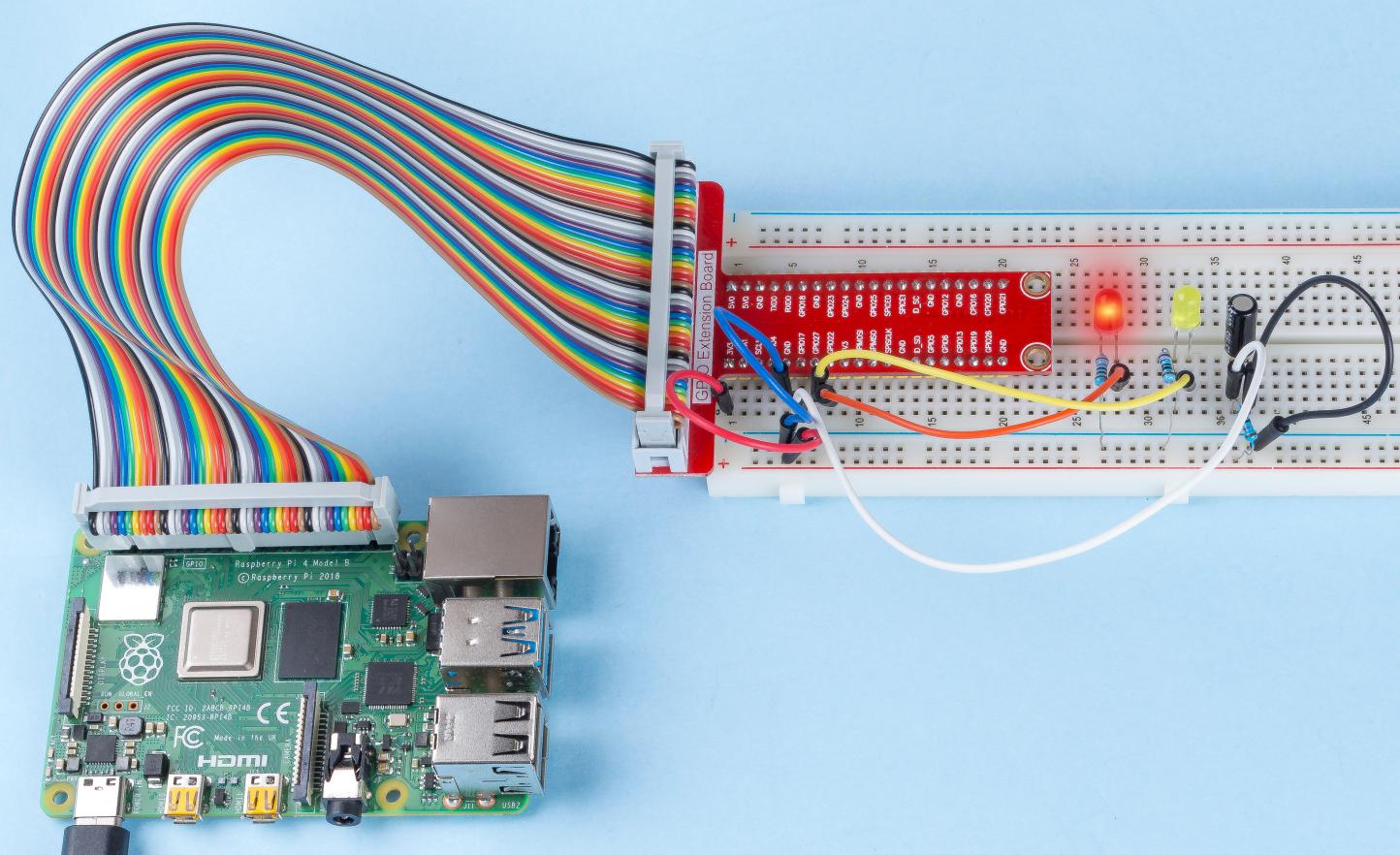
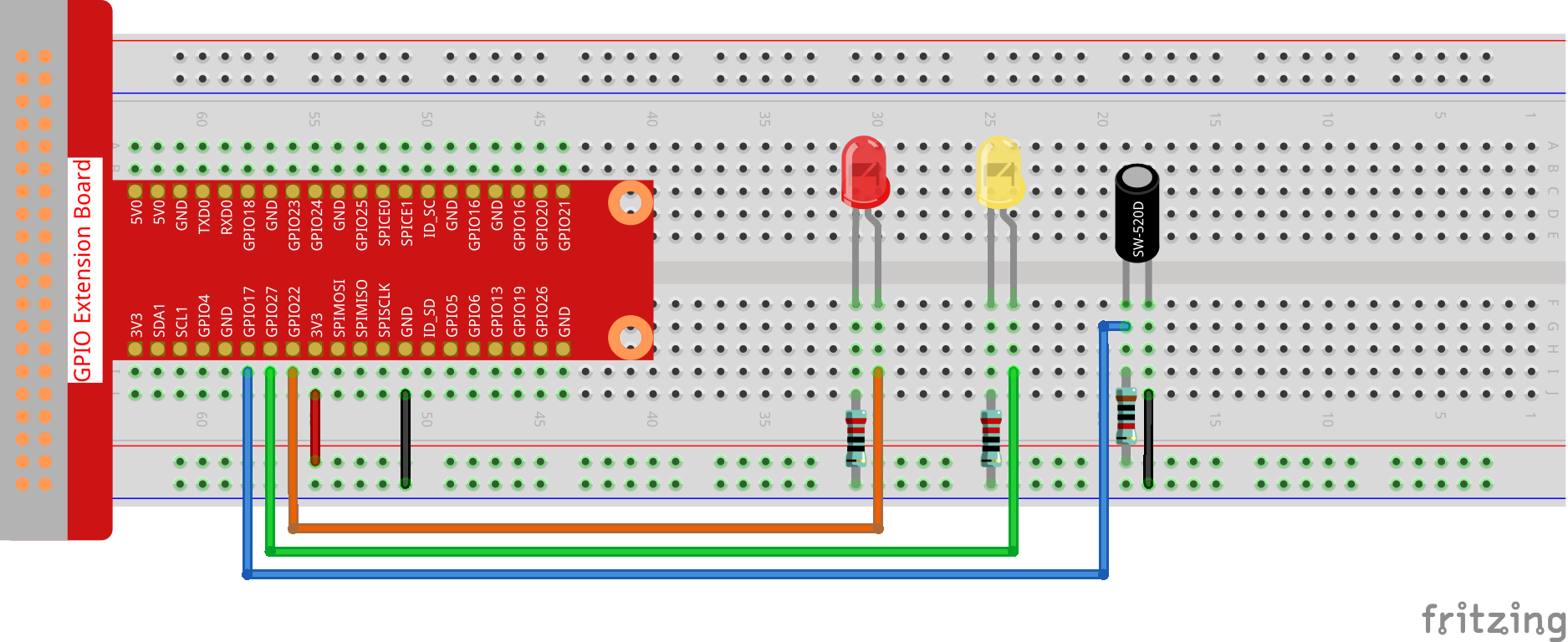
ステップ1: 回路を作る。
C言語ユーザー向け
ステップ2: ディレクトリを変更する。
cd ~/davinci-kit-for-raspberry-pi/c/2.1.3/
ステップ3: コンパイルする。
gcc 2.1.3_Tilt.c -lwiringPi
ステップ4: 実行する。
sudo ./a.out
水平に置くと、緑色のLEDが点灯する。傾けると、「Tilt!」画面にプリントされ、赤いLEDが点灯する。再び水平に置くと、緑色のLEDが再び点灯する。
コード
#include <wiringPi.h>
#include <stdio.h>
#define TiltPin 0
#define Gpin 2
#define Rpin 3
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(TiltPin, INPUT);
LED("GREEN");
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
delay(100);
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
return 0;
}
コードの説明
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
関数 LED() を定義して、2つのLEDをオン・オフにする。
パラメータの色が赤の場合、赤のLEDが点灯する。
同様に、パラメータの色が緑の場合、緑のLEDが点灯する。
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
傾斜スイッチの読み取り値が0の場合、傾斜スイッチが傾斜していることを意味し、 関数LEDにパラメーター「RED」を書き込んで赤色LEDを点灯させる。 そうしない場合、緑色のLEDが点灯する。
Python言語ユーザー向け
ステップ2: ディレクトリを変更する。
cd ~/davinci-kit-for-raspberry-pi/python/
ステップ3: 実行する。
sudo python3 2.1.3_Tilt.py
水平に置くと、緑色のLEDが点灯する。 傾けると、「Tilt!」画面にプリントされ、赤いLEDが点灯する。 再び水平に置くと、緑色のLEDが再び点灯する。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 できます。 ただし、その前に、 davinci-kit-for-raspberry-pi/python のようなソースコードパスに移動する必要があります。
import RPi.GPIO as GPIO
import time
dhtPin = 17
GPIO.setmode(GPIO.BCM)
MAX_UNCHANGE_COUNT = 100
STATE_INIT_PULL_DOWN = 1
STATE_INIT_PULL_UP = 2
STATE_DATA_FIRST_PULL_DOWN = 3
STATE_DATA_PULL_UP = 4
STATE_DATA_PULL_DOWN = 5
def readDht11():
GPIO.setup(dhtPin, GPIO.OUT)
GPIO.output(dhtPin, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(dhtPin, GPIO.LOW)
time.sleep(0.02)
GPIO.setup(dhtPin, GPIO.IN, GPIO.PUD_UP)
unchanged_count = 0
last = -1
data = []
while True:
current = GPIO.input(dhtPin)
data.append(current)
if last != current:
unchanged_count = 0
last = current
else:
unchanged_count += 1
if unchanged_count > MAX_UNCHANGE_COUNT:
break
state = STATE_INIT_PULL_DOWN
lengths = []
current_length = 0
for current in data:
current_length += 1
if state == STATE_INIT_PULL_DOWN:
if current == GPIO.LOW:
state = STATE_INIT_PULL_UP
else:
continue
if state == STATE_INIT_PULL_UP:
if current == GPIO.HIGH:
state = STATE_DATA_FIRST_PULL_DOWN
else:
continue
if state == STATE_DATA_FIRST_PULL_DOWN:
if current == GPIO.LOW:
state = STATE_DATA_PULL_UP
else:
continue
if state == STATE_DATA_PULL_UP:
if current == GPIO.HIGH:
current_length = 0
state = STATE_DATA_PULL_DOWN
else:
continue
if state == STATE_DATA_PULL_DOWN:
if current == GPIO.LOW:
lengths.append(current_length)
state = STATE_DATA_PULL_UP
else:
continue
if len(lengths) != 40:
#print ("Data not good, skip")
return False
shortest_pull_up = min(lengths)
longest_pull_up = max(lengths)
halfway = (longest_pull_up + shortest_pull_up) / 2
bits = []
the_bytes = []
byte = 0
for length in lengths:
bit = 0
if length > halfway:
bit = 1
bits.append(bit)
#print ("bits: %s, length: %d" % (bits, len(bits)))
for i in range(0, len(bits)):
byte = byte << 1
if (bits[i]):
byte = byte | 1
else:
byte = byte | 0
if ((i + 1) % 8 == 0):
the_bytes.append(byte)
byte = 0
#print (the_bytes)
checksum = (the_bytes[0] + the_bytes[1] + the_bytes[2] + the_bytes[3]) & 0xFF
if the_bytes[4] != checksum:
#print ("Data not good, skip")
return False
return the_bytes[0], the_bytes[2]
def main():
while True:
result = readDht11()
if result:
humidity, temperature = result
print ("humidity: %s %%, Temperature: %s C`" % (humidity, temperature))
time.sleep(1)
def destroy():
GPIO.cleanup()
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
destroy()
コードの説明
GPIO.add_event_detect(TiltPin, GPIO.BOTH, callback=detect, bouncetime=200)
TiltPinで検出を設定し、検出する関数をコールバックする。
def Led(x):
if x == 0:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
if x == 1:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
関数 Led() を定義して、2つのLEDをオンまたはオフにする。
x=0の場合、赤いLEDが点灯する。そうしないと、緑色のLEDが点灯する。
def Print(x):
if x == 0:
print (' *************')
print (' * Tilt! *')
print (' *************')
関数 Print() を作成して、画面上の上記の文字をプリントする。
def detect(chn):
Led(GPIO.input(TiltPin))
Print(GPIO.input(TiltPin))
傾斜コールバックのコールバック関数を定義する。傾斜スイッチの読み取り値を取得してから、
関数 Led() が傾斜スイッチの読み取り値に依存する2つのLEDを点灯・消灯させる。
現象画像